C#通过NI-VISA操作Tektronix TBS 2000B系列示波器
一、概述
本文描述采用C#语言访问控制Tektronix TBS 2000B 系列示波器。接口协议采用NI-VISA。
最近一个项目需要和一款示波器进行通信,需要对示波器进行一些简单控制并获取到波形数据。经过一段时间研究,大致了解了相关操作,因为发现相关资料不是很多,所以把我了解的相关知识和大家分享一下。文末将提供本文涉及的相关文档、代码、安装程序的下载地址。
正常情况下,我们如果需要和一个设备进行通信,首先需要知道PC通过什么方式和设备进行连接,通信协议是什么。由于工作需要和很多设备进行过连接,常用的连接方式主要有:网络连接、串口连接、USB接口连接等;通信协议都是自定义的协议文本。 本来以为这个项目首先得需要搞清楚示波器的通信协议,然后才能进行下一步开发,在官方网站下载了一些编程资料,发现该设备是可以通过VISA进行连接的,那什么是VISA呢?VISA是由National Instruments公司牵头,联合一些设备制造厂商共同指定的一个通用设备连接标准,不管设备通过何种方式进行连接,只要符合VISA规范就可以通过该标准协议进行连接,而NI-VISA就是NI公司实现的一个协议,通过这个协议接口,我们不用直接和设备进行通信,只需要通过NI-VISA提供的接口就可以访问设备,而常用的接口非常简单,主要就是OPEN、WRITE、READ等几个命令。符合规范的设备都会公开一份SCPI指令集的文档,只要仔细阅读该文档就可以实现设备的控制。在整个项目过程中,我仅仅通过几个官方网站下载的文档就完成项目开发,几乎没有什么障碍,在此不得不感慨我们的制造业和发达国家相比确实有很大差距,我们就缺少这样标准性的东西,什么事情都得从底层做起,很不科学。要是那些巨头们肯做一些这方面的工作就太好了,比做什么买菜、卖鱼的APP有意义得多了。
二、连接
示波器通过网络接口和PC进行连接

配置示波器IP和PC在同一个网段,例如:192.168.11.11,在设置时注意IP内不要有0,然后在PC上先ping一下,看能否ping通。

如果能ping通就在浏览器输入http://192.168.11.11看能否打开示波器主页,确认SCPI指令可以运行。

三、安装驱动
运行NI-VISA Runtime安装程序,选中运行时基础包和.NET支持包。
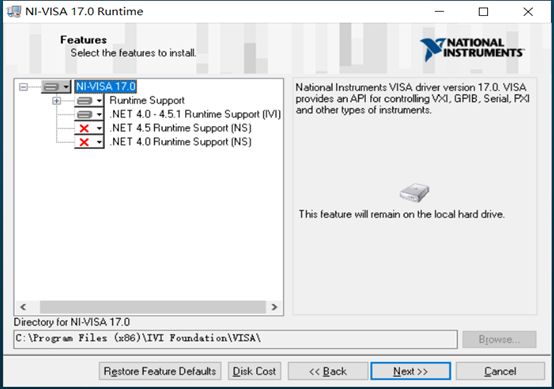
.NET支持包选.NET 4.0-4.5.1 Runtime Support(IVI),不选.NET XX Runtime Support(NS),NS的包是老版本。
安装完成后形成两个包:Ivi.Visa和NationalInstruments.Visa
其中Ivi.Visa有两个版本:
32位位置:C:\Program Files (x86)\IVI Foundation\VISA\Microsoft.NET\Framework32\v2.0.50727\VISA.NET Shared Components 5.8.0
64位位置:C:\Program Files\IVI Foundation\VISA\Microsoft.NET\Framework64\v2.0.50727\VISA.NET Shared Components 5.8.0
NationalInstruments.Visa位置:C:\Windows\Microsoft.NET\assembly\GAC_MSIL\NationalInstruments.Visa\v4.0_17.0.0.0__2eaa5af0834e221d
四、引用
新建VS工程,按上述地址添加Ivi.Visa和NationalInstruments.Visa两个引用。Ivi.Visa的库根据需要可以选32位或64位。
程序运行需要在目标机器安装运行时,所以引用的库不需要复制到项目文件夹。

五、代码
已经有网友把VISA接口调用进行了封装,我直接使用了相关代码,几乎一字未改,相关代码请查阅:https://www.cnblogs.com/cncc/p/7866899.html
连接代码:


string IP = this.txtIP.Text.Trim(); string IpRegex = @"^((25[0-5]|2[0-4]\d|[01]?\d\d?)\.){3}(25[0-5]|2[0-4]\d|[01]?\d\d?)$"; if (!Regex.IsMatch(IP, IpRegex)) { MessageBox.Show("IP地址不正确!"); return; } if (!PortUltility.OpenIPAddress(IP, out string fullAddress)) { MessageBox.Show("未找到设备!"); return; } try { _portOperatorBase = new LANPortOperator(fullAddress); } catch (Exception ex) { MessageBox.Show($"初始化设备失败:{ex.Message}"); return; } try { _portOperatorBase.Timeout = 2000; _portOperatorBase.Open(); } catch (Exception ex) { MessageBox.Show($"连接设备失败:{ex.Message}"); return; } EnabledControls(true); MessageBox.Show("连接成功!");
写指令一共有两种,一种不需要返回数据、一种需要返回数据,下发了需要返回数据的指令后才能进行读取指令,否则就会读取失败。
读写指令如下:
private void btnWrite_Click(object sender, EventArgs e) { string CmdStr = this.txtCommand.Text.Trim(); try { _portOperatorBase.WriteLine(CmdStr); ShowLog($"[Write][{CmdStr}][Success]"); } catch { ShowLog($"[Write][{CmdStr}][ERROR]"); } } private void btnReadString_Click(object sender, EventArgs e) { try { var result = _portOperatorBase.Read(); ShowLog($"[Read][{result}][{result.Length}]"); } catch (IOTimeoutException) { ShowLog($"[Read][ERROR:Timeout]"); } catch (Exception ex) { ShowLog($"[Read][Exception:{ex.Message}]"); } }
核心代码就这么多,剩下的就根据需要查询SCPI指令表就可以了。
附录、相关SCPI指令
以下指令仅适用于Tektronix TBS 2000B系列示波器。
(一) 基本指令 1. 身份 WRITE:*IDN? READ: (二) 设置 1. 默认设置 RECAll:SETUp FACtory 2. 通道控制 Select:CH<x> ON/OFF 3. 水平位置与比例 HORizontal:POSition? HORizontal:POSition 10 HORizontal:SCAle? 400 单位是秒 HORizontal:SCAle 0.2 4. 垂直位置与比例 CH1:POSition? CH1:POSition 1 CH1:SCAle? CH1:SCAle 2.5 5. 触发 模式 TRIGger:A:MODe? NORMAL 触发类型 TRIGger:A:TYPe? EDGE 触发源 TRIGger:A:EDGE:SOUrce CH1 耦合: TRIGger:A:EDGE:COUPling g {DC|HFRej|LFRej|NOISErej} 斜率 TRIGger:A:EDGE:SLOpe {RISe|FALL} 触发电平(当前) TRIGger:A:LEVel? 2.0800 TRIGger:A:LEVel 3.5 触发电平(指定通道) TRIGger:A:LEVel:CH1? 2.0800 TRIGger:A:LEVel :CH1 3.5 (三) 控制 1. 设置/查询工作类型 ACQuire:STOPAfter SEQuence ACQuire:STOPAfter RUNSTOP 查询:ACQuire:STOPAfter? 返回最后一次设置的工作类型 2. 设置/查询运行状态 ACQuire:STATE? 0:Run或Single 1:Stop 设置:ACQuire:STATE ON/OFF 3. 查询触发状态 TRIGger:STATE? READY:等待触发 SAVE:已经触发 (四) 读取数据 1. 设置数据来源(通道) DATA:SOURCE CH1 2. 设置/读取记录宽度 HORizontal:RECOrdlength? 2000 3. 读取波形数据宽度(仅读取,触发完成后有效) WFMOutpre:RECOrdlength? 2000 4. 设置传输数据窗口 DATa:STARt 1 最小为1 DATa:STOP 2000 DATa:WIDth? 单个数据宽度(字节数)默认为1,可以修改为2字节,但高位始终为0 5. 数据读取 CURVe? Read(Bytes):返回指定长度的字节数据【LENGTH= N+(STOP-STARt+1)+1】 数据为:帧头(N字节)+数据(STOP-STARt+1字节)+帧尾(1字节)。 帧头为:#(1字节)+数据长度的长度(1字节)+数据长度(1~9字节) 帧尾为:\n 数据每个字节表示一个波形高度值,采用补码方式,即第一个位表示符号,范围从-128~127
相关文档、代码下载:https://gitee.com/seabluescn/tksamples.git
签名区:
如果您觉得这篇博客对您有帮助或启发,请点击右侧【推荐】支持,谢谢!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号