

TurtleBot3 tutorial (一)
The high level of English is a standard for a top student.
1. No one is born a genius. Just keep on doing what you like and that itself is a talent.
2. The beginning of Spring Rain Water Insects Awakening
Spring Equinox Fresh Green Grain Rain Beginning of Summer
Lesser Fullness Grain in Ear Summer Solstice Lesser Heat Greater Heat
The beginning of Autumn End of Heat White Dew Autumnal Equinox
Cold Dew First Frost Beginning of Winter Light Snow
Heavy Snow Winter Solstice Lesser Cold Greater Cold
3. Happy Mid-Autumn Festival! May the round moon bring you a happy family and a successful future.
4. Behind every girl’s favorite song, there is an untold story.
5. If you want something you've never had, you've got to do something you've never done.
6. Worry is a misuse of imagination.
7. Difficult roads often lead to beautiful destinations.
8. The best preparation for tomorrow is doing your best today.
9. If you can dream it, you can do it.
10. I'm so lost but not afraid, I've been broken and raise again.
What’s your favorite part of your home?
I don’t think I have too many choices to choose from. After all, I only have one part all to myself---that is, my bedroom. I have, in my bedroom, a state-of-the-art gaming device----the latest X-box. It’s a kick-ass device. You can literally do anything with it. Virtual running, batting, shooting, white-water rafting, and horse-back riding, you name it. When I am in my bedroom, I can play however I want without disturbing anyone. I think it is the place I would go to forget all my problems and recharge my battery.
ENTRY (http://wiki.ros.org/gazebo_ros_pkgs)
Connect to ROS (http://gazebosim.org/tutorials?cat=connect_ros)
ROS is a robot control framework. These tutorials describe how to interface Gazebo and ROS.
1. Installing gazebo_ros_pkgs (http://gazebosim.org/tutorials?tut=ros_installing&cat=connect_ros)
2. Which combination of ROS/Gazebo versions to use(http://gazebosim.org/tutorials?tut=ros_wrapper_versions&cat=connect_ros)
This document provides an overview of the options to use different versions of ROS in combination with different versions of Gazebo. It is recommended to read it before installing the Gazebo ROS wrappers.
3. Installing gazebo_ros_pkgs (http://gazebosim.org/tutorials?tut=ros_installing&cat=connect_ros)
4. Using roslaunch to start Gazebo, world files and URDF models
(http://gazebosim.org/tutorials?tut=ros_roslaunch&cat=connect_ros)
There are many ways to start Gazebo, open world models and spawn robot models into the simulated environment. In this tutorial, we cover the ROS-way of doing things: using rosrun and roslaunch. This includes storing your URDF files in ROS packages and keeping your various resource paths relative to your ROS workspace.
note:
Focus on instance development, master core skills, make full use of resources, tutorials are supported by examples, time is the only advantage that allows you to make breakthroughs, come on!
turtlebot3
1. Overview: (http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/)
What is TurtleBot? (https://www.turtlebot.com/about/)
TurtleBot is a low-cost, personal robot kit with open-source software. TurtleBot was created at Willow Garage by Melonee Wise and Tully Foote in November 2010. With TurtleBot, you’ll be able to build a robot that can drive around your house, see in 3D, and have enough horsepower to create exciting applications.
The TurtleBot kit consists of a mobile base, 2D/3D distance sensor, laptop computer or SBC(Single Board Computer), and the TurtleBot mounting hardware kit. In addition to the TurtleBot kit, users can download the TurtleBot SDK from the ROS wiki. TurtleBot is designed to be easy to buy, build, and assemble, using off the shelf consumer products and parts that easily can be created from standard materials. As an entry level mobile robotics platform, TurtleBot has many of the same capabilities of the company’s larger robotics platforms, like PR2.
For more information
TurtleBot Inventors Tell Us Everything About the Robot (IEEE Spectrum, By Evan Ackerman, 26 Mar 2013)
Core Technology
TurtleBot3 is a small, affordable, programmable, ROS-based mobile robot for use in education, research, hobby, and product prototyping. The goal of TurtleBot3 is to dramatically reduce the size of the platform and lower the price without having to sacrifice its functionality and quality, while at the same time offering expandability. The TurtleBot3 can be customized into various ways depending on how you reconstruct the mechanical parts and use optional parts such as the computer and sensor. In addition, TurtleBot3 is evolved with cost-effective and small-sized SBC that is suitable for robust embedded system, 360 degree distance sensor and 3D printing technology.
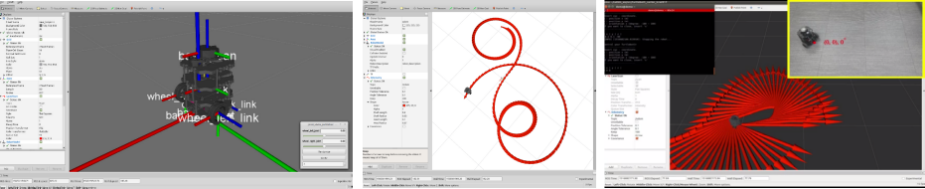
The TurtleBot3’s core technology is SLAM, Navigation and Manipulation, making it suitable for home service robots. The TurtleBot can run SLAM(simultaneous localization and mapping) algorithms to build a map and can drive around your room. Also, it can be controlled remotely from a laptop, joypad or Android-based smart phone. The TurtleBot can also follow a person’s legs as they walk in a room. Also the TurtleBot3 can be used as a mobile manipulator capable of manipulating an object by attaching a manipulator like OpenManipulator. The OpenManipulator has the advantage of being compatible with TurtleBot3 Waffle and Waffle Pi. Through this compatibility can compensate for the lack of freedom and can have greater completeness as a service robot with the the SLAM and navigation capabilities that the TurtleBot3 has.
2. Notices (http://emanual.robotis.com/docs/en/platform/turtlebot3/notices/#notices)

4. Specifications (http://emanual.robotis.com/docs/en/platform/turtlebot3/specifications/#specifications)
Very important:
5. Getting Started (http://emanual.robotis.com/docs/en/platform/turtlebot3/getting_started/#getting-started)
This page is for users who are new to TurtleBot3. The manual has an enormous amount of content, but this page explains how information is divided.
(1) About TurtleBot3
First of all, collect information from the Overview, Notices, Features, and Specifications pages to get an overall understanding of TurtleBot3.
(2) First steps for using TurtleBot3
When you have enough understanding about TurtleBot3 from above step, here are the software and hardware setups. Be aware that it is a time-saver to set up the SBC and your PC first, rather than assembling the robot. It is recommended to proceed in the following order.
- PC Setup: Install Linux, ROS and application software for TurtleBot3 on your Remote PC.
- SBC Setup: Install Linux, ROS and hardware related software to control the TurtleBot3 on your TurtleBot PC.
- OpenCR Setup: Upload latest firmware of TurtleBot3 to OpenCR embedded board.
- Hardware Setup: TurtleBots3 is delivered as unassembled parts in the box. Follow the instructions to assemble TurtleBot3. Prepared SBC and OpenCR will be mounted on the robot.
- If you want to use other products instead of SBCs and Sensors included in the TurtleBot3 package, please refer to the Compatible Devices page.

(3) Let’s try the basic operation
Once you have completed the above steps, run the robot through the provided Bringup package, and remotely move the robot with the teleoperation feature.
Next, let’s check various sensors’ value mounted on the robot or learn how to control the robot by reading Basic Operation page.
4. Keep TurtleBot3’s various technologies with you
The TurtleBot3’s core technology is SLAM, Navigation and Manipulation, making it suitable for home service robots. These technologies can be applied either on a real robot or a virtual robot with Simulation feature.
Of course, they can be implemented in TurtleBot3, such as Autonomous Driving and Machine Learning. In addition, we are introducing 12 different types of Locomotion as TurtleBot3 Friends, as well as differential drive mobile robot. With this openended component, handful of TurtleBot3 friends with various characteristics could be built. You can create a totally new robot that is never seen before. Also interesting applications such as Follower Demo, Panoramic Demo, and Automatic Parking are available. See Applications page for more application examples.

5. Learn and Explore more
The above are just a few examples of using TurtleBot3. You can learn more and challenge yourself with the following information.
You can Learn more through the ROS courses provided by the Construct, the various lectures created by TurtleBot3 users, web content, YouTube courses, free books, and more. In addition, various Videos produced by ROBOTIS will be helpful, and use cases using TurtleBot3 can be checked through various Projects released by TurtleBot3 research collaborators and TurtleBot3 users. You can also try a variety of challenges through Challenges.


 浙公网安备 33010602011771号
浙公网安备 33010602011771号