

[技术学习]毫米波技术之毫米波雷达
Ref.: 毫米波技术之毫米波雷达
ch1
哈喽大家好
今天呢我们来聊一下毫米波有关的技术。
毫米波呢, 它一般是指24G赫兹到300G赫兹之间的波,也就是它的波长在毫米级别。
频率高,波长短使得毫米波有很多的优势,比如说像通信的方面,毫米波的带宽更宽,相同时间可以承载更多的信息。
延迟也更低。
虽然在通信方面,中美的一个技术路线还不太一样
好美波目前并没有用在5G上面
但是随着卫星通信呢还有5.5G的发展
预期好米波也会更受关注
在探测方面的话
因为它波长短,所以它的探测精度高,所以可以用在雷达和高精度定位上。
同时毫米波又不会像激光雷达那样,它的波长过于短,很容易被散射掉。
所以毫米博客用在雨雪天气,也可以绕过障碍物进行探测。
所以总的来说,毫米波现在的应用方向其实主要就是两个,一个就是通信,另外一个就是雷达。
两边的侧重点其实不太一样,所以需要的技术呢也有差别。
像雷达的话
它是利用无线电回波
以探测目标方向和距离的一种装置
所以他更关注的是灵敏性
也就是发出去的波能不能回来
但是呢它的发射的信号不需要搭载任何信息
只需要根据返回来的信号
对目标的特征进行分析就可以了
而通信呢就不太一样
它的核心呢是信息的交互
所以呢他发出去的波它要求也比较高
比如说它的信号质量要好
不能污染隔壁的信道等等
所以本期视频呢就先来聊一下毫米波雷达
看一下毫米波雷达的原理构成和技术
难点在哪里
然后下一期视频呢我会聊一下毫米波通信
毫米波雷达呢现在主流的应用领域呢有两块
一块呢就是军事
另外一块是车载
军事航母波雷达其实发展的已经非常久了
而且也很成熟
现在车规级毫米波雷达呢
主要做的就是性能与体积
还有成本之间的平衡
本期视频呢也主要以车载雷达为主
看一下毫米波雷达的技术方向
首先我们来看一下雷达是如何探测物体的
距离
呃首先呢是探测距离
它主要有两种方法
一种呢是脉冲式
另外一个呢就是连续波的方法好
军事上的话一般会用脉冲式
因为它测量的距离比较远
而且相对来说算法也比较简单
精度也比较高。
但这种方法呢对短距离测试
性价比就不是很高了
因为它对脉冲的功率要求比较高
于是呢就不是很适合
像车载这种对功耗要求比较苛刻的地方
所以呢在车载上面一般用的是fm cw调频
连续波
在FMCW雷达当中
射频前端会产生
并且发射一个线性调频的撤退信号
就像这张图里面啊
最上面那个图的实现部分
然后发出的信号呢遇到障碍物反射回来
并被接收天线接收
所接收到的信号
就是发射信号的一个时间延迟信号
也就是图中虚线的部分
然后我们看到这两个信号呢
其实是频率调制方法一致
但是呢就有一个相位差
于是呢我们就把这个发射和接收信号进行混频
得到它们的差值
也就是中频信号
混评的结果呢就是中间的那张图
这个频率呢与目标的距离是成正比的
最下面的图
就是将这个中频信号经过ADC采样之后
的一个数字信号的模样
OK我们现在有距离了
速度
然后再看一下如何测速度
测速的其实用的就是我们中学学过的
多普勒效应
简而言之呢就是观察者向着波源运动的时候
波就是被挤压的
观测得到的频率是变高的
相反呢就是波被拉长
观测到的频率变低
现在我们有距离和速度了
角度
然后就需要一个角度信息
把物体的位置确定下来
当然我们需要雷达角分辨率是越高越好了
雷达角分辨率呢其实它约等于波束的一个宽度
所以一个最简单的思路
就是让发射的电磁波的波束尽可能的窄
其实激光雷达的原理也是类似的
但是呢这个技术对于激光雷达来说
就是特别简单的
因为激光它本身的方向性就特别好
但是呢对毫米波来说就没那么容易了
这时如果听过我上期天线的朋友
可能会联想到
没错
就是用波束赋形技术把波束变尖
使它的方向性更好
4D毫米波雷达 - 加俯仰角
好了
我们现在已经在一个平面上
确定了物体的位置
但是这对自动驾驶来说还是远远不够的
所以最近一个比较流行的技术
就是4D毫米波雷达
其实呢就是在我们上面聊的三个维度的基础上
加了一个俯仰角
虽然它只是多了一个维度
但是瞬间他又把障碍物变立体了
因为毫米波雷达的价格
只有激光雷达的几分之一
所以呢4D毫米波雷达一经推出
就成了当红炸子鸡
而且大家也在讨论
是否可以用几个毫米波雷达来替代激光雷达
好大家有兴趣的话
也可以把自己的观点写在评论区
新挑战 - 数据量
但是探测能力的上升
也就是说它多了一个俯仰角
伴随着呢其实是数据量的急剧增多
算法也和传统的毫米波芯片有所不同
所以我们看到很多传统的毫米波雷达公司
其实并做不了4D毫米波雷达
原因就是信号处理和点云处理的架构
其实是不一样的
毫米波雷达构成
OK说完毫米波的探测原理
我们接下来就来看一下毫米波雷达的构成
这是一个毫米波雷达的一个基本结构
天线系统
从左上边开始看
首先是天线系统
这个就是我们上期聊的相控阵技术
然后向右看就看到发射机
接收机还有一个波形产生器
这块统称就是射频前端
然后我们继续向右看
射频前端呢和AD变换器相连
当然这个图画的比较粗略了
AD变换器前面还有混频器和低通滤波器
好这一块就统称为中频好
中频的频率
其实是介于射频和基带信号之间的
这个中字其实也有中间的
还有临时的含义
根据之前我们聊的测距原理
我们需要对接收信号和发射信号进行混频
然后对这个混频信号进行低通滤波
然后是进行ADC采样
这一块其实就是由中平在负责的
信号处理和数据处理
接着往右看就是信号处理和数据处理
这里就会用到DSP和MCU
就有点类似通信里面的鸡蛋
车载毫米波例子
具体这个毫米波雷达是怎么运作的
我们可以以77G赫兹的一个车载
毫波雷达为例
首先呢就是由波形产生器和合成器
生成一个相对频率较低的一个trip信号
好
这时候我们能得到25~20G赫兹
一个周期的信号
接着呢经过锁相环技术
三倍被频
将这个车牌信号的频率
变换为76~81G赫兹
紧接着一部分的信号被传输到混频器
而另一部分就传输至移项器
将这个信号进行相位移动
然后以一定的角度经过功率放大器之后
通过天线发出
然后这个发出去的信号撞到了物体反射回来
然后接着就由接收天线的接收这个信号
并且由低噪音放大器把这个信号进行放大
并且降低噪声
接着经过处理的信号呢就传到了混频器
和我们之前的一个发射信号进行混频
就得到了IF中频信号哦
因为混屏之后的信号其实有两个
一个是频率相加的信号
一个是频率相减的信号
所以我们需要低通滤波器
把那个高频的频率相加的信号给滤掉
留下我们想要的插值信号
紧接着就通过ADC进行采样和魔术转换
最终的将这个中频信号转化为数字信号
毫米波雷达的制造难点
我们有了雷达结构之后
接下来就要看一下它的制造难点在哪里
从这张图我们看到
射频前端和中频是集成在一个MIC
就是单片微波集成电路上面的
CMOS 工艺问题
第一个难点其实就是CMOS工艺问题
现在主流的技术趋势是集成化
也就是把全部的东西都集成到一颗soc里面
因为soc可以很大程度减少芯片的尺寸
功耗和成本
符合车载和消费电子的需求
无源器件其实还是相对来说比较好
集成的最困难的其实是有元器件
比如说像高精度的信号源
高功率放大器和高灵敏度的一个低噪声放大器
我们在聊半导体材料的时候提到
在高频的情况下
一般会用到第二代半导体
也就是生化钾或者是磷化音
如果想在此基础上提高功率
也就是说抗压的话
就会用到第三代半导体氮化镓
像雷达的核心器件
功率放大器的话
在军事雷达上面会用到第二代
第三代半导体
就是生化钾和氮化镓
但是这种第二代第三代半导体的功放
虽然频率高
也耐压
效率也好
但是一个很大的问题就是特别贵
而且很难和硅衬底来做集成
这对消费品市场其实是很不友好的
所以现在车载雷达的主流技术
是用者规和CMOS工艺来做有源器件
我们知道者归工艺和CMOS工艺最大的好处
就是它不像三五族元素
用的是四族元素
所以相对来说容易集成
除了射频
前端
中频的高频器件其实也是一个问题
尤其是ADC采样器
从我们最开始聊的测距原理就可以知道
我们是需要通过中频的频率来计算距离的
所以中频采样的频率
也就决定了能测量的最远的距离
但是我们知道CMOS工艺的一个很大的问题
就是它的节制频率其实是相对来说比较低的
什么是截止频率呢
截止频率可以简单理解为一个器件
它能正常工作的频率上限
那么如何理解这个截止频率比较低
并且如何提高这个截止频率
而我们知道CMOS器件
它的工作原理是通过三级的电压
来控制原级到六级的一个载流子
从而控制原六级的一个电流
当家在三级的信号发生变化的时候
原漏极的电流也会发生相应的变化
因此就起到了信号放大的作用
然而如果原机的载流子还来不及
走到漏极的时候
山崎的信号就发生了改变
那么三级的信号其实就无法得到有效的放大了
因为毫米波的频率是非常高的
现在主流频率是在77G赫兹
到80G赫兹哦
所以我们就要提高这个截止频率
我们可以通过提高CMOS的工艺制程
也就是说它减少沟道的一个长度
或者是增大三级电压
但这也意味着其实就是功耗的提高
但是无论如何
毫米波的频率和CMOS工艺的截止频率
其实是非常接近的
所以难点就是如何能更好地设计器件
使得在工艺提升的情况下
功耗也能在消费电子可以承受的范围之内
所以我们会看到我国在军用雷达
或通信基站啊
做的都是比较好的
但是一到消费电子车载很多相同功能的期间
就是很难能做到
主要原因就是因为他用了不同的工艺
但是好就好在雷达相对于通信来说
对信号的要求并没有那么高
通信我们知道它的频段特别复杂嘛
还要兼容3G4G5G
还有各个国家之间都不太一样
都要兼容
而雷达呢其实就只有三四个信道
所以对于波的处理也相对容易一些
好了
我们聊完了第一个难点了
也就是CMOS工艺
传输线问题
第二个难点呢其实就是传输线问题
因为传输线问题是在高频的情况下
也是被放大的
好在这里呢我可以跟大家分享一个
我在网上看到一个非常形象的一个类比
就是说如果把导线比喻成一个绳子
连接的器件
比喻成人的手
然后呢人在绳子的一头挥动就产生机械波
如果波长远大于绳子的长度
那么就可以近似的认为这是一个静力分析哦
也就是人手的力呢等于绳子各个点的弹力
但是如果波长近似等于或者小于导线的长度
那么绳子的弹力就在每一点都不同了
所以分析的难度也会增大
然后类比到毫米波
就是如果信号的波长远大于导线的长度的时候
导线上每一点的信号
其实都约等于信号源的信号
但是如果信号的波长等于导线的长度
或者小于的时候
导线上每一点的信号就不同了
然后我们知道导线的长度
其实就是毫米级别的
然后毫米波它的波长也是毫米级别的
于是它又对应着第二种情况
也就是比较复杂的情况
同时导线的性质
也就是说它的特征阻抗
也会极大影响到信号的传播啊等等
这些效应其实整体就叫做传输线效应
所以我们看到集成毫米波
MIMIC的一个PCB板的材质其实也是特殊的
需要用到高频PCB板
好了
毫米波除了对CMOS工艺
还有传输线问题有更高的要求之外
随着4D雷达的应用
数据处理能力
数据处理能力也变得越来越重要
像算法的硬件化
它就可以提高整体的系统的性能
所以FPGA和DSP芯片的能力也逐渐成为了关键
总结
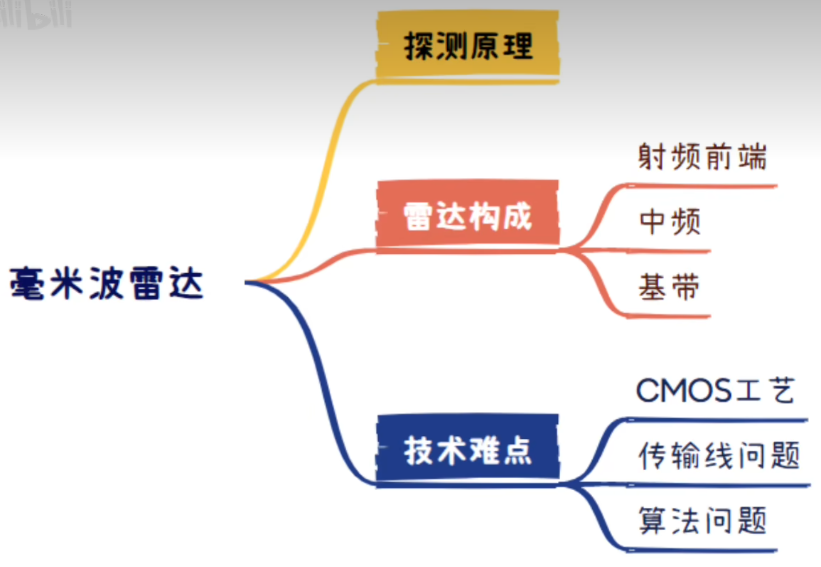
好最后我们来做个小小的总结
本期视频主要聊了毫米波的雷达
方面的应用
首先探讨了雷达的一个测探原理
还有就是雷达的构成
最后聊了一下毫米波芯片有什么技术难点
下一期呢我们会来聊一下
毫米波通信有关的技术
谢谢大家收听
更多参考
[1] TI: 毫米波雷达传感器基础知识
https://www.ti.com/cn/lit/wp/zhcy075/zhcy075.pdf


 浙公网安备 33010602011771号
浙公网安备 33010602011771号