Minimum_jerk参考代码
1. 参考代码
import numpy as np
import matplotlib.pyplot as plt
from cvxopt import matrix, solvers
def genQk(T_down, T_up):
Q = np.zeros((6, 6))
Q[3][4] = 72 * (T_up**2 - T_down**2)
Q[3][5] = 120 * (T_up**3 - T_down**3)
Q[4][5] = 360 * (T_up**4 - T_down**4)
Q = Q + Q.T
Q[3][3] = 36 * (T_up - T_down)
Q[4][4] = 192 * (T_up**3 - T_down**3)
Q[5][5] = 720 * (T_up**5 - T_down**5)
return Q
def main():
path = [[1., 3.], [3., 5.], [4., 2.], [2.5, 1.2], [2., -2.5]]
path = np.array(path)
x = path[:, 0]
deltaT = 2.0
T = np.linspace(0, deltaT * (len(x) - 1), len(x))
K = 3
n_order = 2 * K - 1
M = len(x) - 1
N = M * (n_order + 1)
Q = np.zeros((N, N))
for idx in range(M):
Qk = genQk(T[idx], T[idx + 1])
Q[6 * idx : 6 * (idx + 1), 6 * idx : 6 * (idx + 1)] = Qk
A0 = np.zeros((2 * K + M - 1, N))
b0 = np.zeros(len(A0))
for k in range(K):
for i in range(k, 6):
c = 1.0
for j in range(k):
c *= (i - j)
A0[2 * k][i] = c * T[0]**(i - k)
A0[2 * k + 1][6 * (M - 1) + i] = c * T[M]**(i - k)
b0[0] = x[0]
b0[1] = x[M]
for m in range(1, M):
for i in range(6):
A0[6 + m - 1][6 * m + i] = T[m]**i
b0[6 + m - 1] = x[m]
A1 = np.zeros((3 * (M - 1), N))
b1 = np.zeros(len(A1))
for m in range(M - 1):
for k in range(3):
for i in range(k, 6):
c = 1
for j in range(k):
c *= (i - j)
A1[3 * m + k][6 * m + i] = c * T[m + 1]**(i - k)
A1[3 * m + k][6 * (m + 1) + i] = -c * T[m + 1]**(i - k)
A = np.vstack((A0, A1))
b = np.hstack((b0, b1))
Q = matrix(Q)
q = matrix(np.zeros(N))
A = matrix(A)
b = matrix(b)
result = solvers.qp(Q, q, A = A, b = b)
p_coff = np.array(result['x'])
Pos, Vel, Acc, Time = [], [], [], []
for k in range(M):
t = np.linspace(T[k], T[k + 1], 100)
coef = p_coff[6 * k: 6 * (k + 1)]
coef = np.reshape(coef, (1, 6))
for i in range(100):
t_pos = np.array([1.0, t[i]**1, t[i]**2, t[i]**3, t[i]**4, t[i]**5])
t_vel = np.array([0.0, 1.0, 2.0 * t[i], 3.0 * t[i]**2, 4.0 * t[i]**3, 5.0 * t[i]**4])
t_acc = np.array([0.0, 0.0, 2.0, 6.0 * t[i], 12.0 * t[i]**2, 20.0 * t[i]**3])
pos = np.dot(coef, t_pos)
vel = np.dot(coef, t_vel)
acc = np.dot(coef, t_acc)
Pos.append(pos)
Vel.append(vel)
Acc.append(acc)
Time.append(t[i])
plt.subplot(3, 1, 1)
plt.plot(Time, Pos)
plt.xlabel("time(s)")
plt.ylabel("position(m)")
plt.subplot(3, 1, 2)
plt.plot(Time, Vel)
plt.xlabel("time(s)")
plt.ylabel("velocity(m/s)")
plt.subplot(3, 1, 3)
plt.plot(Time, Acc)
plt.xlabel("time(s)")
plt.ylabel("accel(m/s^2)")
plt.show()
if __name__ == "__main__":
main()
2. 运行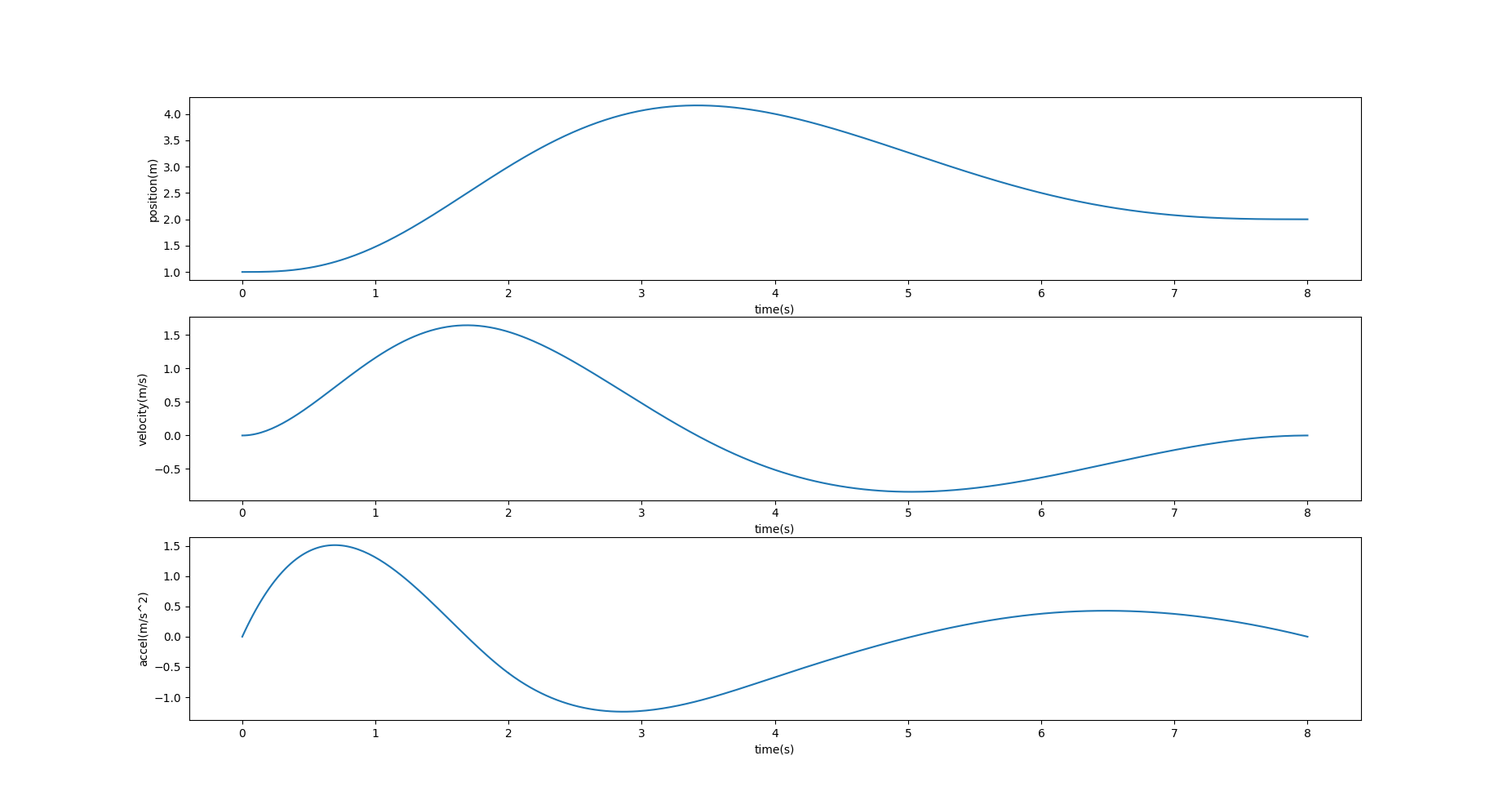
结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号