OpenDrive转lanelet2的方法
1. 常用的高精地图格式如下:
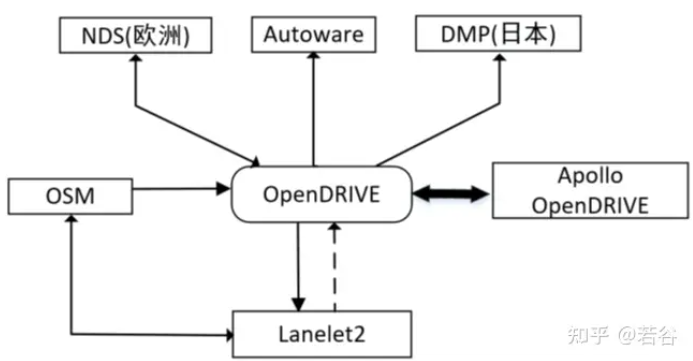
2. 本文采用OpenDrive->CommonRoad->Lanelet2的方式进行地图格式转换
3. 转换代码如下:
import sys
import os
from lxml import etree
from commonroad.scenario.scenario import Tag
from commonroad.common.file_writer import CommonRoadFileWriter, OverwriteExistingFile
from commonroad.planning.planning_problem import PlanningProblemSet
from commonroad.common.file_reader import CommonRoadFileReader
# OpenDrive to CommonRoad
from crdesigner.map_conversion.map_conversion_interface import opendrive_to_commonroad
from crdesigner.map_conversion.opendrive.opendrive_parser.parser import parse_opendrive
from crdesigner.map_conversion.opendrive.opendrive_conversion.network import Network
# CommonRoad to Lanelet
from crdesigner.map_conversion.map_conversion_interface import commonroad_to_lanelet
class Xodr2lanelet2:
def __init__(self, name):
self.name = name
self.opendrive_path = os.path.dirname(os.path.realpath(__file__)) + "/" + self.name + ".xodr"
self.commonroad_path = os.path.dirname(os.path.realpath(__file__)) + "/" + self.name + ".xml"
self.lanelet2_path = os.path.dirname(os.path.realpath(__file__)) + "/" + self.name + ".osm"
def xodr2lanelet2(self):
self.__xodr2commonroad()
self.__commonroad2lanelet2()
def __xodr2commonroad(self):
# load OpenDrive file, parse it, and convert it to a CommonRoad scenario
scenario = opendrive_to_commonroad(self.opendrive_path)
# store converted file as CommonRoad scenario
writer = CommonRoadFileWriter(
scenario=scenario,
planning_problem_set=PlanningProblemSet(),
author="Synkrotron",
affiliation="Synkrotron",
source="CommonRoad Scenario Designer",
tags={Tag.URBAN},
)
writer.write_to_file(self.commonroad_path, OverwriteExistingFile.ALWAYS)
def __commonroad2lanelet2(self):
commonroad_to_lanelet(self.commonroad_path, self.lanelet2_path)
def main(name):
convert = Xodr2lanelet2(name)
convert.xodr2lanelet2()
if __name__ == "__main__":
main(sys.argv[1])
4. 转换方法:
(1) 安装地图转换包commonroad:
pip3 install commonroad-all -i https://pypi.tuna.tsinghua.edu.cn/simple
(2) 修改地图转换包commonroad中的代码:
~/.local/lib/python3.10/site-packages/crdesigner/map_conversion/opendrive/opendrive_parser/parser.py中将
with file_path.open("r") as file_in:
改为:
with open(file_path, "r") as file_in:
~/.local/lib/python3.10/site-packages/crdesigner/config/lanelet2_config.py中将
autoware = Attribute(False, "Autoware", "Boolean indicating whether the conversion should be autoware compatible")
改为:
autoware = Attribute(True, "Autoware", "Boolean indicating whether the conversion should be autoware compatible")
将:
use_local_coordinates = Attribute(False, "Use local coordinates",
"Boolean indicating whether local coordinates should be added")
改为:
use_local_coordinates = Attribute(True, "Use local coordinates",
"Boolean indicating whether local coordinates should be added")
(3) 运用3中的代码进行转换,示例如下:
python3 xodr2lanelet2.py Town01/Town01
参考文献:
[2] https://zhuanlan.zhihu.com/p/393715053

 浙公网安备 33010602011771号
浙公网安备 33010602011771号