
Hadoop(二)基本概念
(一)Hadoop 整体设计
Hadoop 框架是用于计算机集群大数据处理的框架,所以它必须是一个可以部署在多台计算机上的软件。部署了 Hadoop 软件的主机之间通过套接字 (网络) 进行通讯。
Hadoop 主要包含 HDFS 和 MapReduce 两大组件,HDFS 负责分布储存数据,MapReduce 负责对数据进行映射、规约处理,并汇总处理结果。
Hadoop 框架最根本的原理就是利用大量的计算机同时运算来加快大量数据的处理速度。例如,一个搜索引擎公司要从上万亿条没有进行规约的数据中筛选和归纳热门词汇就需要组织大量的计算机组成集群来处理这些信息。如果使用传统数据库来处理这些信息的话,那将会花费很长的时间和很大的处理空间来处理数据,这个量级对于任何单计算机来说都变得难以实现,主要难度在于组织大量的硬件并高速地集成为一个计算机,即使成功实现也会产生昂贵的维护成本。
Hadoop 可以在多达几千台廉价的量产计算机上运行,并把它们组织为一个计算机集群。一个 Hadoop集群可以高效地储存数据、分配处理任务,这样会有很多好处。首先可以降低计算机的建造和维护成本,其次,一旦任何一个计算机出现了硬件故障,不会对整个计算机系统造成致命的影响,因为面向应用层开发的集群框架本身就必须假定计算机会出故障。
HDFS
Hadoop Distributed File System,Hadoop 分布式文件系统,简称 HDFS。HDFS 用于在集群中储存文件,它所使用的核心思想是 Google 的 GFS 思想,可以存储很大的文件。
在服务器集群中,文件存储往往被要求高效而稳定,HDFS同时实现了这两个优点。
HDFS 高效的存储是通过计算机集群独立处理请求实现的。因为用户 (一半是后端程序) 在发出数据存储请求时,往往响应服务器正在处理其他请求,这是导致服务效率缓慢的主要原因。但如果响应服务器直接分配一个数据服务器给用户,然后用户直接与数据服务器交互,效率会快很多。
数据存储的稳定性往往通过"多存几份"的方式实现,HDFS 也使用了这种方式。HDFS 的存储单位是块 (Block) ,一个文件可能会被分为多个块储存在物理存储器中。因此 HDFS 往往会按照设定者的要求把数据块复制 n 份并存储在不同的数据节点 (储存数据的服务器) 上,如果一个数据节点发生故障数据也不会丢失。
- Read a File

- Write a File

HDFS 的节点
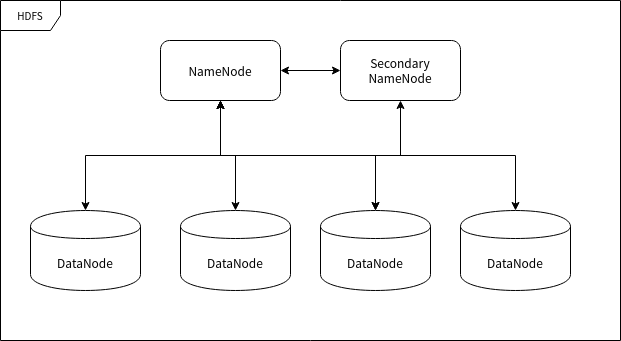
HDFS 运行在许多不同的计算机上,有的计算机专门用于存储数据,有的计算机专门用于指挥其它计算机储存数据。这里所提到的"计算机"我们可以称之为集群中的节点。
- 命名节点 (NameNode)
命名节点 (NameNode) 是用于指挥其它节点存储的节点。任何一个"文件系统"(File System, FS) 都需要具备根据文件路径映射到文件的功能,命名节点就是用于储存这些映射信息并提供映射服务的计算机,在整个 HDFS 系统中扮演"管理员"的角色,因此一个 HDFS 集群中只有一个命名节点。
- 数据节点 (DataNode)
数据节点 (DataNode) 使用来储存数据块的节点。当一个文件被命名节点承认并分块之后将会被储存到被分配的数据节点中去。数据节点具有储存数据、读写数据的功能,其中存储的数据块比较类似于硬盘中的"扇区"概念,是 HDFS 存储的基本单位。
- 副命名节点 (Secondary NameNode)
副命名节点 (Secondary NameNode) 别名"次命名节点",是命名节点的"秘书"。这个形容很贴切,因为它并不能代替命名节点的工作,无论命名节点是否有能力继续工作。它主要负责分摊命名节点的压力、备份命名节点的状态并执行一些管理工作,如果命名节点要求它这样做的话。如果命名节点坏掉了,它也可以提供备份数据以恢复命名节点。副命名节点可以有多个。
(二)MapReduce计算模型
概念理解
MapReduce是面向大数据并行处理的计算模型、框架和平台,它隐含了以下三层含义:
- MapReduce是一个基于集群的高性能并行计算平台。它允许用市场上普通的商用服务器构成一个包含数十、数百至数千个节点的分布和并行计算集群。
- MapReduce是一个并行计算与运行软件框架。它提供了一个庞大但设计精良的并行计算软件框架,能自动完成计算任务的并行化处理,自动划分计算数据和计算任务,在集群节点上自动分配和执行任务以及收集计算结果,将数据分布存储、数据通信、容错处理等并行计算涉及到的很多系统底层的复杂细节交由系统负责处理,大大减少了软件开发人员的负担。
- MapReduce是一个并行程序设计模型与方法。它借助于函数式程序设计语言Lisp的设计思想,提供了一种简便的并行程序设计方法,用Map和Reduce两个函数编程实现基本的并行计算任务,提供了抽象的操作和并行编程接口,以简单方便地完成大规模数据的编程和计算处理。
总结:MapReduce是一个基于集群的计算平台,是一个简化分布式编程的计算框架,是一个将分布式计算抽象为Map和Reduce两个阶段的编程模型。MapReduce核心思想:分而治之
MapReduce计算模型
MapReduce计算模型主要由三个阶段构成:Map、shuffle、Reduce。
Map是映射,负责数据的过滤分法,将原始数据转化为键值对;Reduce是合并,将具有相同key值的value进行处理后再输出新的键值对作为最终结果。为了让Reduce可以并行处理Map的结果,必须对Map的输出进行一定的排序与分割,然后再交给对应的Reduce,而这个将Map输出进行进一步整理并交给Reduce的过程就是Shuffle。整个MR的大致过程如下


Map和Reduce操作需要我们自己定义相应Map类和Reduce类,以完成我们所需要的化简、合并操作,而shuffle则是系统自动帮我们实现的,了解shuffle的具体流程能帮助我们编写出更加高效的Mapreduce程序。
(三)Map shuffle
在Map端的shuffle过程是对Map的结果进行分区、排序、分割,然后将属于同一划分(分区)的输出合并在一起并写在磁盘上,最终得到一个分区有序的文件,分区有序的含义是map输出的键值对按分区进行排列,具有相同partition值的键值对存储在一起,每个分区里面的键值对又按key值进行升序排列(默认),其流程大致如下:

-
Partition
对于map输出的每一个键值对,系统都会给定一个partition,partition值默认是通过计算key的hash值后对Reduce task的数量取模获得。如果一个键值对的partition值为1,意味着这个键值对会交给第一个Reducer处理。
每一个Reduce的输出都是有序的,但是将所有Reduce的输出合并到一起却并非是全局有序的,如果要做到全局有序,我们该怎么做呢?最简单的方式,只设置一个Reduce task,但是这样完全发挥不出集群的优势,而且能应对的数据量也很受限。最佳的方式是自己定义一个Partitioner,用输入数据的最大值除以系统Reduce task数量的商作为分割边界,也就是说分割数据的边界为此商的1倍、2倍至numPartitions-1倍,这样就能保证执行partition后的数据是整体有序的。
-
Collector
Map的输出结果是由collector处理的,每个Map任务不断地将键值对输出到在内存中构造的一个环形数据结构中。使用环形数据结构是为了更有效地使用内存空间,在内存中放置尽可能多的数据。
这个数据结构其实就是个字节数组,叫Kvbuffer,名如其义,但是这里面不光放置了数据,还放置了一些索引数据,给放置索引数据的区域起了一个Kvmeta的别名,在Kvbuffer的一块区域上穿了一个IntBuffer(字节序采用的是平台自身的字节序)的马甲。数据区域和索引数据区域在Kvbuffer中是相邻不重叠的两个区域,用一个分界点来划分两者,分界点不是亘古不变的,而是每次Spill之后都会更新一次。初始的分界点是0,数据的存储方向是向上增长,索引数据的存储方向是向下增长,如图所示:

Kvbuffer的存放指针bufindex是一直闷着头地向上增长,比如bufindex初始值为0,一个Int型的key写完之后,bufindex增长为4,一个Int型的value写完之后,bufindex增长为8。
- Sort
当Spill触发后,SortAndSpill先把Kvbuffer中的数据按照partition值和key两个关键字升序排序,移动的只是索引数据,排序结果是Kvmeta中数据按照partition为单位聚集在一起,同一partition内的按照key有序。
-
Spill
Spill线程为这次Spill过程创建一个磁盘文件:从所有的本地目录中轮训查找能存储这么大空间的目录,找到之后在其中创建一个类似于“spill12.out”的文件。Spill线程根据排过序的Kvmeta挨个partition的把数据吐到这个文件中,一个partition对应的数据吐完之后顺序地吐下个partition,直到把所有的partition遍历完。一个partition在文件中对应的数据也叫段(segment)。在这个过程中如果用户配置了combiner类,那么在写之前会先调用combineAndSpill(),对结果进行进一步合并后再写出。
在Spill线程如火如荼的进行SortAndSpill工作的同时,Map任务不会因此而停歇,而是一无既往地进行着数据输出。Map还是把数据写到kvbuffer中,那问题就来了:只顾着闷头按照bufindex指针向上增长,kvmeta只顾着按照Kvindex向下增长,是保持指针起始位置不变继续跑呢,还是另谋它路?如果保持指针起始位置不变,很快bufindex和Kvindex就碰头了,碰头之后再重新开始或者移动内存都比较麻烦,不可取。Map取kvbuffer中剩余空间的中间位置,用这个位置设置为新的分界点,bufindex指针移动到这个分界点,Kvindex移动到这个分界点的-16位置,然后两者就可以和谐地按照自己既定的轨迹放置数据了,当Spill完成,空间腾出之后,不需要做任何改动继续前进。分界点的转换如下图所示:
Map任务总要把输出的数据写到磁盘上,即使输出数据量很小在内存中全部能装得下,在最后也会把数据刷到磁盘上。
- Merge
Map任务如果输出数据量很大,可能会进行好几次Spill,out文件和Index文件会产生很多,分布在不同的磁盘上。最后把这些文件进行合并的merge过程闪亮登场。
Merge过程怎么知道产生的Spill文件都在哪了呢?从所有的本地目录上扫描得到产生的Spill文件,然后把路径存储在一个数组里。Merge过程又怎么知道Spill的索引信息呢?没错,也是从所有的本地目录上扫描得到Index文件,然后把索引信息存储在一个列表里。

然后为merge过程创建一个叫file.out的文件和一个叫file.out.Index的文件用来存储最终的输出和索引,一个partition一个partition的进行合并输出。对于某个partition来说,从索引列表中查询这个partition对应的所有索引信息,每个对应一个段插入到段列表中。也就是这个partition对应一个段列表,记录所有的Spill文件中对应的这个partition那段数据的文件名、起始位置、长度等等。
(四)Reduce shuffle
在Reduce端,shuffle主要分为复制Map输出、排序合并两个阶段。
- Copy
Reduce任务通过HTTP向各个Map任务拖取它所需要的数据。Map任务成功完成后,会通知父TaskTracker状态已经更新,TaskTracker进而通知JobTracker(这些通知在心跳机制中进行)。所以,对于指定作业来说,JobTracker能记录Map输出和TaskTracker的映射关系。Reduce会定期向JobTracker获取Map的输出位置,一旦拿到输出位置,Reduce任务就会从此输出对应的TaskTracker上复制输出到本地,而不会等到所有的Map任务结束。
- Merge Sort
Copy过来的数据会先放入内存缓冲区中,如果内存缓冲区中能放得下这次数据的话就直接把数据写到内存中,即内存到内存merge。Reduce要向每个Map去拖取数据,在内存中每个Map对应一块数据,当内存缓存区中存储的Map数据占用空间达到一定程度的时候,开始启动内存中merge,把内存中的数据merge输出到磁盘上一个文件中,即内存到磁盘merge。在将buffer中多个map输出合并写入磁盘之前,如果设置了Combiner,则会化简压缩合并的map输出。Reduce的内存缓冲区可通过mapred.job.shuffle.input.buffer.percent配置,默认是JVM的heap size的70%。内存到磁盘merge的启动门限可以通过mapred.job.shuffle.merge.percent配置,默认是66%。
当属于该reducer的map输出全部拷贝完成,则会在reducer上生成多个文件(如果拖取的所有map数据总量都没有内存缓冲区,则数据就只存在于内存中),这时开始执行合并操作,即磁盘到磁盘merge,Map的输出数据已经是有序的,Merge进行一次合并排序,所谓Reduce端的sort过程就是这个合并的过程。一般Reduce是一边copy一边sort,即copy和sort两个阶段是重叠而不是完全分开的。最终Reduce shuffle过程会输出一个整体有序的数据块。
-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------
引用
https://www.runoob.com/w3cnote/hadoop-intro.html
https://blog.csdn.net/weixin_45366499/article/details/106892489

 浙公网安备 33010602011771号
浙公网安备 33010602011771号