vgg以及pytorch
vgg:
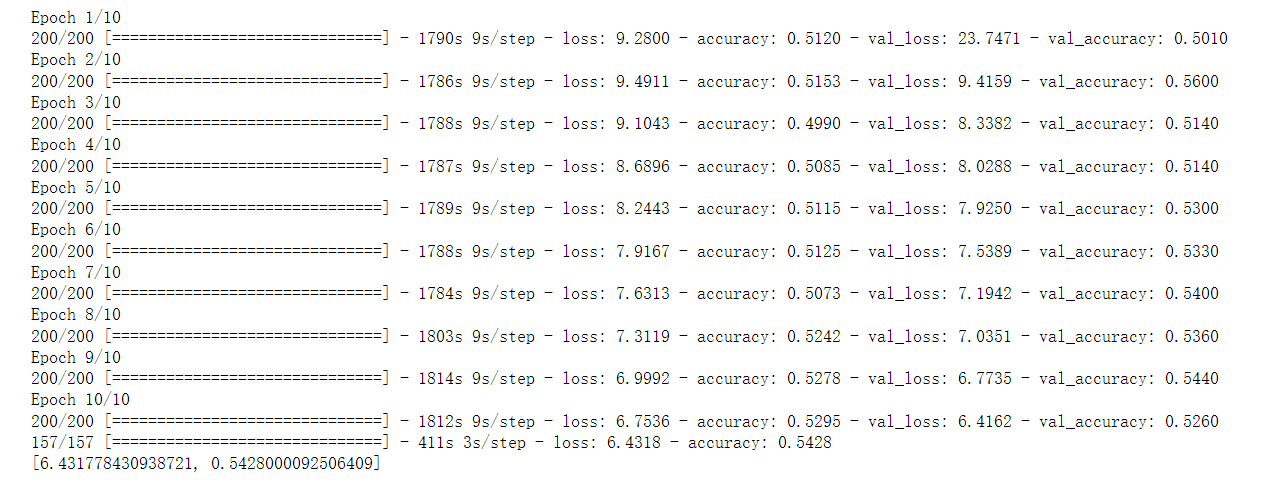
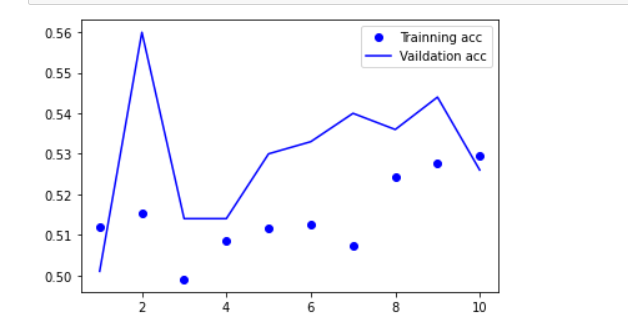
import tensorflow as tf from tensorflow import keras from tensorflow.keras import layers, regularizers import numpy as np import os import cv2 import matplotlib.pyplot as plt os.environ["CUDA_VISIBLE_DEVICES"] = "1" resize = 224 path ="train/" def load_data(): imgs = os.listdir(path) num = len(imgs) train_data = np.empty((5000, resize, resize, 3), dtype="int32") train_label = np.empty((5000, ), dtype="int32") test_data = np.empty((5000, resize, resize, 3), dtype="int32") test_label = np.empty((5000, ), dtype="int32") for i in range(5000): if i % 2: train_data[i] = cv2.resize(cv2.imread(path+'/'+ 'dog.' + str(i) + '.jpg'), (resize, resize)) train_label[i] = 1 else: train_data[i] = cv2.resize(cv2.imread(path+'/' + 'cat.' + str(i) + '.jpg'), (resize, resize)) train_label[i] = 0 for i in range(5000, 10000): if i % 2: test_data[i-5000] = cv2.resize(cv2.imread(path+'/' + 'dog.' + str(i) + '.jpg'), (resize, resize)) test_label[i-5000] = 1 else: test_data[i-5000] = cv2.resize(cv2.imread(path+'/' + 'cat.' + str(i) + '.jpg'), (resize, resize)) test_label[i-5000] = 0 return train_data, train_label, test_data, test_label def vgg16(): weight_decay = 0.0005 nb_epoch = 100 batch_size = 32 # layer1 model = keras.Sequential() model.add(layers.Conv2D(64, (3, 3), padding='same', input_shape=(224, 224, 3), kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.3)) # layer2 model.add(layers.Conv2D(64, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.MaxPooling2D(pool_size=(2, 2))) # layer3 model.add(layers.Conv2D(128, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer4 model.add(layers.Conv2D(128, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.MaxPooling2D(pool_size=(2, 2))) # layer5 model.add(layers.Conv2D(256, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer6 model.add(layers.Conv2D(256, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer7 model.add(layers.Conv2D(256, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.MaxPooling2D(pool_size=(2, 2))) # layer8 model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer9 model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer10 model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.MaxPooling2D(pool_size=(2, 2))) # layer11 model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer12 model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.Dropout(0.4)) # layer13 model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) model.add(layers.MaxPooling2D(pool_size=(2, 2))) model.add(layers.Dropout(0.5)) # layer14 model.add(layers.Flatten()) model.add(layers.Dense(512, kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) # layer15 model.add(layers.Dense(512, kernel_regularizer=regularizers.l2(weight_decay))) model.add(layers.Activation('relu')) model.add(layers.BatchNormalization()) # layer16 model.add(layers.Dropout(0.5)) model.add(layers.Dense(2)) model.add(layers.Activation('softmax')) return model #if __name__ == '__main__': train_data, train_label, test_data, test_label = load_data() train_data = train_data.astype('float32') test_data = test_data.astype('float32') train_label = keras.utils.to_categorical(train_label, 2) test_label = keras.utils.to_categorical(test_label, 2) #定义训练方法,超参数设置 model = vgg16() sgd = tf.keras.optimizers.SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True) #设置优化器为SGD model.compile(loss='categorical_crossentropy', optimizer=sgd, metrics=['accuracy']) history = model.fit(train_data, train_label, batch_size=20, epochs=10, validation_split=0.2, #把训练集中的五分之一作为验证集 shuffle=True) scores = model.evaluate(test_data,test_label,verbose=1) print(scores) model.save('model/vgg16dogcat.h5') acc = history.history['accuracy'] # 获取训练集准确性数据 val_acc = history.history['val_accuracy'] # 获取验证集准确性数据 loss = history.history['loss'] # 获取训练集错误值数据 val_loss = history.history['val_loss'] # 获取验证集错误值数据 epochs = range(1, len(acc) + 1) plt.plot(epochs, acc, 'bo', label='Trainning acc') # 以epochs为横坐标,以训练集准确性为纵坐标 plt.plot(epochs, val_acc, 'b', label='Vaildation acc') # 以epochs为横坐标,以验证集准确性为纵坐标 plt.legend() # 绘制图例,即标明图中的线段代表何种含义 plt.show()
pytorch:
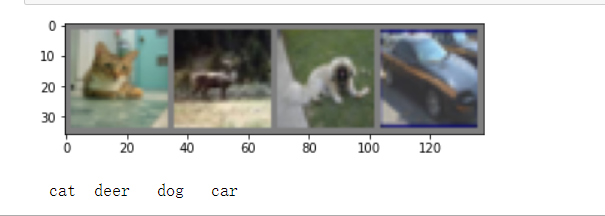
import torch import torchvision import torchvision.transforms as transforms import os os.environ["KMP_DUPLICATE_LIB_OK"]="TRUE" transform = transforms.Compose( [transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform) trainloader = torch.utils.data.DataLoader(trainset, batch_size=4, shuffle=True, num_workers=2) testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform) testloader = torch.utils.data.DataLoader(testset, batch_size=4, shuffle=False, num_workers=2) classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck') import matplotlib.pyplot as plt import numpy as np # functions to show an image def imshow(img): img = img / 2 + 0.5 # unnormalize npimg = img.numpy() plt.imshow(np.transpose(npimg, (1, 2, 0))) plt.show() # get some random training images dataiter = iter(trainloader) images, labels = dataiter.next() # show images imshow(torchvision.utils.make_grid(images)) # print labels print(' '.join('%5s' % classes[labels[j]] for j in range(4)))
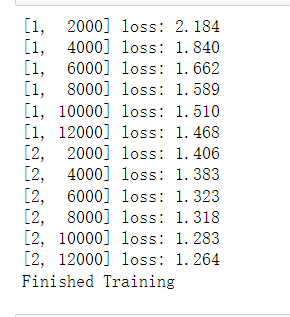
import torch.nn as nn import torch.nn.functional as F class Net(nn.Module): def __init__(self): super(Net, self).__init__() self.conv1 = nn.Conv2d(3, 6, 5) self.pool = nn.MaxPool2d(2, 2) self.conv2 = nn.Conv2d(6, 16, 5) self.fc1 = nn.Linear(16 * 5 * 5, 120) self.fc2 = nn.Linear(120, 84) self.fc3 = nn.Linear(84, 10) def forward(self, x): x = self.pool(F.relu(self.conv1(x))) x = self.pool(F.relu(self.conv2(x))) x = x.view(-1, 16 * 5 * 5) x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x net = Net() import torch.optim as optim criterion = nn.CrossEntropyLoss() optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9) for epoch in range(2): # loop over the dataset multiple times running_loss = 0.0 for i, data in enumerate(trainloader, 0): # get the inputs inputs, labels = data # zero the parameter gradients optimizer.zero_grad() # forward + backward + optimize outputs = net(inputs) loss = criterion(outputs, labels) loss.backward() optimizer.step() # print statistics running_loss += loss.item() if i % 2000 == 1999: # print every 2000 mini-batches print('[%d, %5d] loss: %.3f' % (epoch + 1, i + 1, running_loss / 2000)) running_loss = 0.0 print('Finished Training')
outputs = net(images) _, predicted = torch.max(outputs, 1) print('Predicted: ', ' '.join('%5s' % classes[predicted[j]] for j in range(4)))

correct = 0 total = 0 with torch.no_grad(): for data in testloader: images, labels = data outputs = net(images) _, predicted = torch.max(outputs.data, 1) total += labels.size(0) correct += (predicted == labels).sum().item() print('Accuracy of the network on the 10000 test images: %d %%' % ( 100 * correct / total))

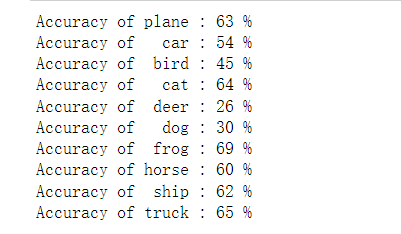
class_correct = list(0. for i in range(10)) class_total = list(0. for i in range(10)) with torch.no_grad(): for data in testloader: images, labels = data outputs = net(images) _, predicted = torch.max(outputs, 1) c = (predicted == labels).squeeze() for i in range(4): label = labels[i] class_correct[label] += c[i].item() class_total[label] += 1 for i in range(10): print('Accuracy of %5s : %2d %%' % ( classes[i], 100 * class_correct[i] / class_total[i]))
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # Assume that we are on a CUDA machine, then this should print a CUDA device: print(device) net.to(device) inputs, labels = inputs.to(device), labels.to(device)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号