
Android 12(S) Binder(一)
今天开始了解一下binder,就先从ServiceManager开始学习。
网上的相关博文普遍是Android 11之前的,阅读时对比Android 11或12的代码发现有很多内容找不到了,比如 frameworks/native/cmds/servicemanager 下面的binder.c没有了,原先使用的binder_loop、svcmgr_handler也没有了,多出了新的类ServiceManagerShim等等。原先的ServiceManager是直接操作binder_open 和 mmap函数,现在这些操作都需要借助libbinder,和其他native binder风格一致了,变化还是挺大的。
由于没有研究过Android 10及以前的binder,所以没法做出很清晰的对比,这里直接来看看Android S上的ServiceManager的工作原理。先来看看文件结构:
a. 现在IServiceManager和其他服务相同,可以用aidl文件来生成,aidl文件路径在 frameworks/native/libs/binder/aidl/android/os/IServiceManager.aidl,IServiceManager、BnServiceManager、BpServiceManager由aidl文件来生成,文件路径在 frameworks/native/libs/binder/aidl/android/os/IServiceManager.aidl,生成文件在out\soong\.intermediates\frameworks\native\libs\binder\libbinder\android_arm_armv7-a-neon_shared\gen\aidl\android\os 目录下,命名空间为 android::os(下面以这个命名空间代表aidl生成的类),这些文件会被打包到libbinder中。
b. 路径 frameworks/native/libs/binder/include/binder 下又有一个IServiceManager.h,这和上面由aidl生成的接口文件是完全不同的!这边的IServiceManager是我们平时所include使用的,命名空间为 android::,aidl生成的文件会在 frameworks/native/libs/binder/IServiceManager.cpp中被include使用。
c. frameworks/native/libs/binder/IServiceManager.cpp 中多了一个新的类ServiceManagerShim,继承于android::IServiceManger,这个类是个套壳类,把android::os::IServiceManager重新做了一次封装
d. ServiceManager的服务端实现在 frameworks/native/cmds/servicemanager/ServiceManager.cpp
1、ServiceManager是如何启动的
相关代码在:frameworks/native/cmds/servicemanager/main.cpp
int main(int argc, char** argv) { if (argc > 2) { LOG(FATAL) << "usage: " << argv[0] << " [binder driver]"; } const char* driver = argc == 2 ? argv[1] : "/dev/binder"; // 打开binder驱动,open,mmap sp<ProcessState> ps = ProcessState::initWithDriver(driver); ps->setThreadPoolMaxThreadCount(0); ps->setCallRestriction(ProcessState::CallRestriction::FATAL_IF_NOT_ONEWAY); // 实例化ServiceManager sp<ServiceManager> manager = sp<ServiceManager>::make(std::make_unique<Access>()); // 将自身注册到ServiceManager当中 if (!manager->addService("manager", manager, false /*allowIsolated*/, IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT).isOk()) { LOG(ERROR) << "Could not self register servicemanager"; } // 将ServiceManager设置给IPCThreadState的全局变量 IPCThreadState::self()->setTheContextObject(manager); // 通知binder我就是ServiceManager ps->becomeContextManager(); // 准备Looper sp<Looper> looper = Looper::prepare(false /*allowNonCallbacks*/); BinderCallback::setupTo(looper); ClientCallbackCallback::setupTo(looper, manager); // 循环等待消息 while(true) { looper->pollAll(-1); } // should not be reached return EXIT_FAILURE; }
注册过程大概分为五步:
a. 打开binder驱动
b. 实例化ServiceManager,并将自身注册进去
c. 将ServiceManager传给IPCThreadState
d. 将ServiceManager注册到binder
e. 开始循环监听
接下来分别看看都做了什么:
a. 打开binder驱动
sp<ProcessState> ProcessState::initWithDriver(const char* driver) { return init(driver, true /*requireDefault*/); } sp<ProcessState> ProcessState::init(const char *driver, bool requireDefault) { [[clang::no_destroy]] static sp<ProcessState> gProcess; [[clang::no_destroy]] static std::mutex gProcessMutex; if (driver == nullptr) { std::lock_guard<std::mutex> l(gProcessMutex); return gProcess; } [[clang::no_destroy]] static std::once_flag gProcessOnce; std::call_once(gProcessOnce, [&](){ if (access(driver, R_OK) == -1) { ALOGE("Binder driver %s is unavailable. Using /dev/binder instead.", driver); driver = "/dev/binder"; } std::lock_guard<std::mutex> l(gProcessMutex); // 实例化单例ProcessState gProcess = sp<ProcessState>::make(driver); }); if (requireDefault) { // Detect if we are trying to initialize with a different driver, and // consider that an error. ProcessState will only be initialized once above. LOG_ALWAYS_FATAL_IF(gProcess->getDriverName() != driver, "ProcessState was already initialized with %s," " can't initialize with %s.", gProcess->getDriverName().c_str(), driver); } return gProcess; } ProcessState::ProcessState(const char *driver) : mDriverName(String8(driver)) , mDriverFD(open_driver(driver)) // open_driver 打开驱动 , mVMStart(MAP_FAILED) , mThreadCountLock(PTHREAD_MUTEX_INITIALIZER) , mThreadCountDecrement(PTHREAD_COND_INITIALIZER) , mExecutingThreadsCount(0) , mWaitingForThreads(0) , mMaxThreads(DEFAULT_MAX_BINDER_THREADS) , mStarvationStartTimeMs(0) , mThreadPoolStarted(false) , mThreadPoolSeq(1) , mCallRestriction(CallRestriction::NONE) { if (mDriverFD >= 0) { // mmap the binder, providing a chunk of virtual address space to receive transactions. // mmap虚拟内存映射 大小为 1M - 2页 mVMStart = mmap(nullptr, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0); if (mVMStart == MAP_FAILED) { // *sigh* ALOGE("Using %s failed: unable to mmap transaction memory.\n", mDriverName.c_str()); close(mDriverFD); mDriverFD = -1; mDriverName.clear(); } } #ifdef __ANDROID__ LOG_ALWAYS_FATAL_IF(mDriverFD < 0, "Binder driver '%s' could not be opened. Terminating.", driver); #endif } static int open_driver(const char *driver) { // 打开binder int fd = open(driver, O_RDWR | O_CLOEXEC); if (fd >= 0) { int vers = 0; // ioctl 获取binder版本 status_t result = ioctl(fd, BINDER_VERSION, &vers); if (result == -1) { ALOGE("Binder ioctl to obtain version failed: %s", strerror(errno)); close(fd); fd = -1; } if (result != 0 || vers != BINDER_CURRENT_PROTOCOL_VERSION) { ALOGE("Binder driver protocol(%d) does not match user space protocol(%d)! ioctl() return value: %d", vers, BINDER_CURRENT_PROTOCOL_VERSION, result); close(fd); fd = -1; } size_t maxThreads = DEFAULT_MAX_BINDER_THREADS; // ioctl 获取线程数量 result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads); if (result == -1) { ALOGE("Binder ioctl to set max threads failed: %s", strerror(errno)); } uint32_t enable = DEFAULT_ENABLE_ONEWAY_SPAM_DETECTION; result = ioctl(fd, BINDER_ENABLE_ONEWAY_SPAM_DETECTION, &enable); if (result == -1) { ALOGD("Binder ioctl to enable oneway spam detection failed: %s", strerror(errno)); } } else { ALOGW("Opening '%s' failed: %s\n", driver, strerror(errno)); } return fd; }
从这里的代码可以看出,binder驱动的打开通过ProcessState来完成,可以通过ioctl来和binder进行通讯
b. 实例化ServiceManager,并将自身注册进去
实例化ServiceManager没什么好说的,Access的用法后面有机会再研究。这里主要看addService做了什么
Status ServiceManager::addService(const std::string& name, const sp<IBinder>& binder, bool allowIsolated, int32_t dumpPriority) { // ...... if (binder == nullptr) { return Status::fromExceptionCode(Status::EX_ILLEGAL_ARGUMENT); } // 检查名字是否有效 if (!isValidServiceName(name)) { LOG(ERROR) << "Invalid service name: " << name; return Status::fromExceptionCode(Status::EX_ILLEGAL_ARGUMENT); } #ifndef VENDORSERVICEMANAGER if (!meetsDeclarationRequirements(binder, name)) { // already logged return Status::fromExceptionCode(Status::EX_ILLEGAL_ARGUMENT); } #endif // !VENDORSERVICEMANAGER // implicitly unlinked when the binder is removed // 注册死亡通知同时检查是否是代理对象 if (binder->remoteBinder() != nullptr && binder->linkToDeath(sp<ServiceManager>::fromExisting(this)) != OK) { LOG(ERROR) << "Could not linkToDeath when adding " << name; return Status::fromExceptionCode(Status::EX_ILLEGAL_STATE); } // 将binder保存到容器当中 // Overwrite the old service if it exists mNameToService[name] = Service { .binder = binder, .allowIsolated = allowIsolated, .dumpPriority = dumpPriority, .debugPid = ctx.debugPid, }; auto it = mNameToRegistrationCallback.find(name); if (it != mNameToRegistrationCallback.end()) { for (const sp<IServiceCallback>& cb : it->second) { mNameToService[name].guaranteeClient = true; // permission checked in registerForNotifications cb->onRegistration(name, binder); } } return Status::ok(); }
看起来这里只是将ServiceManager加入到Map中来保存。
c. 将ServiceManager传给IPCThreadState
sp<BBinder> the_context_object; void IPCThreadState::setTheContextObject(const sp<BBinder>& obj) { the_context_object = obj; }
这个方法很简单,就是把ServiceManager传给了IPCThreadState,但是这里第一次见到这个类,来看看self是怎么用的
IPCThreadState* IPCThreadState::self() { if (gHaveTLS.load(std::memory_order_acquire)) { restart: const pthread_key_t k = gTLS; IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k); if (st) return st; // 实例化IPCThreadState对象并返回 return new IPCThreadState; } // Racey, heuristic test for simultaneous shutdown. if (gShutdown.load(std::memory_order_relaxed)) { ALOGW("Calling IPCThreadState::self() during shutdown is dangerous, expect a crash.\n"); return nullptr; } pthread_mutex_lock(&gTLSMutex); if (!gHaveTLS.load(std::memory_order_relaxed)) { int key_create_value = pthread_key_create(&gTLS, threadDestructor); if (key_create_value != 0) { pthread_mutex_unlock(&gTLSMutex); ALOGW("IPCThreadState::self() unable to create TLS key, expect a crash: %s\n", strerror(key_create_value)); return nullptr; } gHaveTLS.store(true, std::memory_order_release); } pthread_mutex_unlock(&gTLSMutex); goto restart; } IPCThreadState::IPCThreadState() : mProcess(ProcessState::self()), // 获取ProcessState对象 mServingStackPointer(nullptr), mWorkSource(kUnsetWorkSource), mPropagateWorkSource(false), mIsLooper(false), mIsFlushing(false), mStrictModePolicy(0), mLastTransactionBinderFlags(0), mCallRestriction(mProcess->mCallRestriction) { pthread_setspecific(gTLS, this); clearCaller(); mIn.setDataCapacity(256); mOut.setDataCapacity(256); }
IPCThreadState::self我看不太懂,不过我猜大体上就是返回一个IPCThreadState对象,其构造函数中初始化了ProcessState成员,ProcessState::self返回的是之前创建的对象。
d. 将ServiceManager注册到binder
bool ProcessState::becomeContextManager() { AutoMutex _l(mLock); flat_binder_object obj { .flags = FLAT_BINDER_FLAG_TXN_SECURITY_CTX, }; int result = ioctl(mDriverFD, BINDER_SET_CONTEXT_MGR_EXT, &obj); // fallback to original method if (result != 0) { android_errorWriteLog(0x534e4554, "121035042"); int unused = 0; result = ioctl(mDriverFD, BINDER_SET_CONTEXT_MGR, &unused); } if (result == -1) { ALOGE("Binder ioctl to become context manager failed: %s\n", strerror(errno)); } return result == 0; }
通过ioctl给驱动发送一个BINDER_SET_CONTEXT_MGR_EXT,告诉它我就是servicemanager,具体驱动那边如何处理就不太清楚了。
e. 开始循环监听
用到Looper来监听消息,并处理(暂时不研究Looper是如何工作的)下面第四部分会看如何监听并回调的
到这里ServiceManager的启动就完成了。
2、如何获取ServiceManager
启动ServiceManager之后我们要如何获取到ServiceManager并且使用它的方法呢?
这时候就要到libbinder中的IServiceManager了,我们平时使用会直接调用defaultServiceManager来获取ServiceManager
[[clang::no_destroy]] static sp<IServiceManager> gDefaultServiceManager; sp<IServiceManager> defaultServiceManager() { std::call_once(gSmOnce, []() { sp<AidlServiceManager> sm = nullptr; while (sm == nullptr) { // 获取一个proxy sm = interface_cast<AidlServiceManager>(ProcessState::self()->getContextObject(nullptr)); if (sm == nullptr) { ALOGE("Waiting 1s on context object on %s.", ProcessState::self()->getDriverName().c_str()); sleep(1); } } // 实例化 ServiceManagerShim gDefaultServiceManager = sp<ServiceManagerShim>::make(sm); }); return gDefaultServiceManager; }
这里分为三个步骤:
a. 通过ProcessState获取到一个ContextObject(BpBinder)
b. interface_cast 转换为一个Bp对象(BpServiceManager)
c. 实例化ServiceManagerShim作为一个中间类
接下来分开看看都是做了些什么?
a. 通过ProcessState获取到一个ContextObject
sp<ProcessState> ProcessState::self() { return init(kDefaultDriver, false /*requireDefault*/); }
先调用ProcessState::self 打开binder驱动(一般情况下调用进程和ServiceManager服务端不在同一个进程,这时候会重新打开binder驱动)
sp<IBinder> ProcessState::getContextObject(const sp<IBinder>& /*caller*/) { sp<IBinder> context = getStrongProxyForHandle(0); if (context) { // The root object is special since we get it directly from the driver, it is never // written by Parcell::writeStrongBinder. internal::Stability::markCompilationUnit(context.get()); } else { ALOGW("Not able to get context object on %s.", mDriverName.c_str()); } return context; }
接着调用getContextObject获取服务端的ServiceManager(handle为0默认为ServiceManager)
sp<IBinder> ProcessState::getStrongProxyForHandle(int32_t handle) { sp<IBinder> result; AutoMutex _l(mLock); handle_entry* e = lookupHandleLocked(handle); if (e != nullptr) { // ...... IBinder* b = e->binder; if (b == nullptr || !e->refs->attemptIncWeak(this)) { if (handle == 0) { // ...... IPCThreadState* ipc = IPCThreadState::self(); CallRestriction originalCallRestriction = ipc->getCallRestriction(); ipc->setCallRestriction(CallRestriction::NONE); Parcel data; status_t status = ipc->transact( 0, IBinder::PING_TRANSACTION, data, nullptr, 0); ipc->setCallRestriction(originalCallRestriction); if (status == DEAD_OBJECT) return nullptr; } // 创建一个BpBinder,handle为0 sp<BpBinder> b = BpBinder::create(handle); e->binder = b.get(); if (b) e->refs = b->getWeakRefs(); result = b; } else { result.force_set(b); e->refs->decWeak(this); } } return result; }
b. interface_cast 转换为一个Bp对象
interface_cast是在IInterface.h中被声明的,调用了服务的asInterface方法,该方法通过IInterface.h中的宏来声明,声明位置在android::os::IServiceManager中
template<typename INTERFACE> inline sp<INTERFACE> interface_cast(const sp<IBinder>& obj) { return INTERFACE::asInterface(obj); } ::android::sp<I##INTERFACE> I##INTERFACE::asInterface( \ const ::android::sp<::android::IBinder>& obj) \ { \ ::android::sp<I##INTERFACE> intr; \ if (obj != nullptr) { \ intr = ::android::sp<I##INTERFACE>::cast( \ obj->queryLocalInterface(I##INTERFACE::descriptor)); \ if (intr == nullptr) { \
// 创建一个Bp对象 \ intr = ::android::sp<Bp##INTERFACE>::make(obj); \ } \ } \ return intr; \ }
queryLocalInterface的实现在BnInterface<android::os::IServiceManager>
template<typename INTERFACE> inline sp<IInterface> BnInterface<INTERFACE>::queryLocalInterface( const String16& _descriptor) { if (_descriptor == INTERFACE::descriptor) return sp<IInterface>::fromExisting(this); return nullptr; }
先获取当前进程的Bn对象,如果返回null,那么就创建一个Bp对象。
使用BpBinder(0) 来实例化一个BpServiceManager对象(sp<xxx>::make定义在libutils中的StrongPointer.h)
BpServiceManager::BpServiceManager(const ::android::sp<::android::IBinder>& _aidl_impl)
: BpInterface<IServiceManager>(_aidl_impl){
}
从这里来看BpServiceManager持有的是一个BpBinder(0),意思就是与server通信需要借助的是这个BpBinder对象,BpServiceManager只是个调用的封装。所以asInterface其实作用就是将一个BpBinder做封装,从这里是不是猜ServiceManager getService获得的就是个BpBinder(handle?),这个后面再去验证。
c. 实例化ServiceManagerShim作为一个中间类
这个特别简单,这里就不展开了。
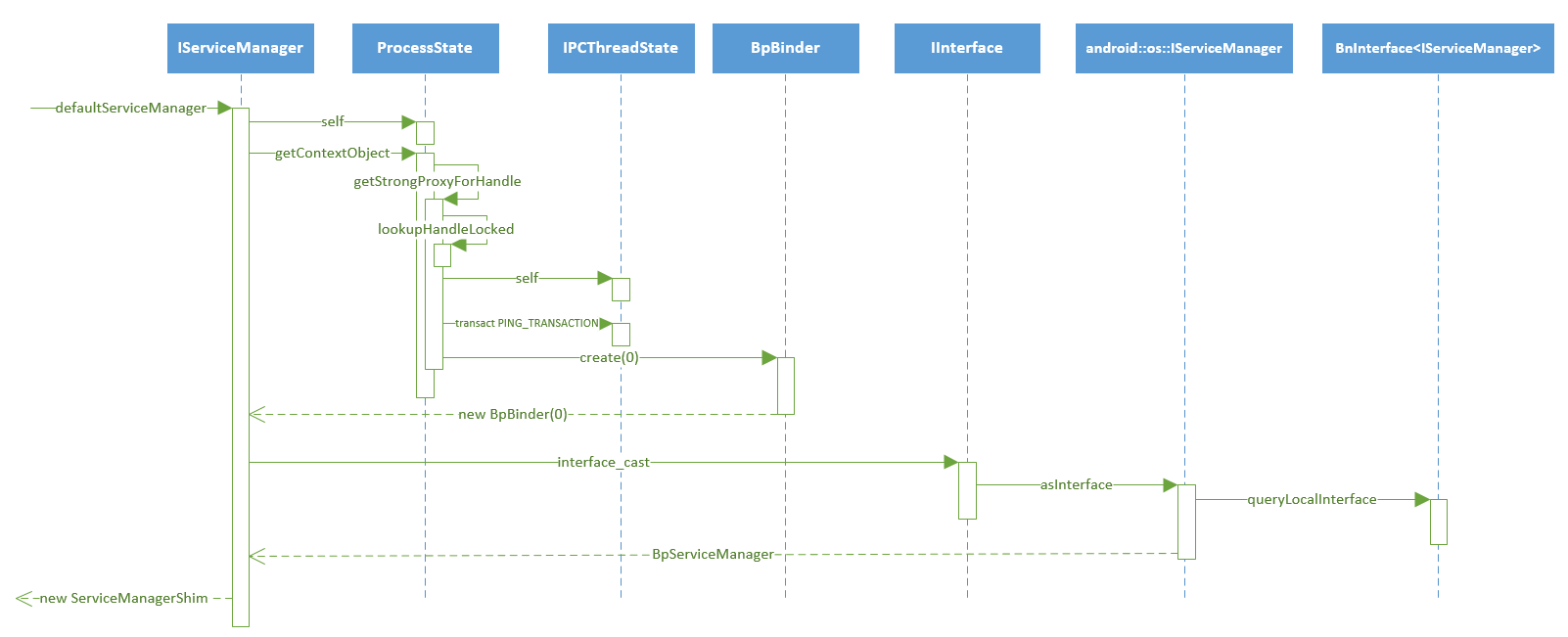
贴上一个时序图,可以发现在获取BpServiceManager时似乎并没有和binder驱动有什么特别的数据往来,那BpServiceManager要怎么调用服务端ServiceManager的方法呢?
3、如何使用ServiceManager
那就从addService来看看一次binder调用都会经历些什么?
status_t ServiceManagerShim::addService(const String16& name, const sp<IBinder>& service, bool allowIsolated, int dumpsysPriority) { Status status = mTheRealServiceManager->addService( String8(name).c_str(), service, allowIsolated, dumpsysPriority); return status.exceptionCode(); }
调用BpServiceManager的addService方法,接下来就要找到aidl生成文件IServiceManager.cpp 中的实现
::android::binder::Status BpServiceManager::addService(const ::std::string& name, const ::android::sp<::android::IBinder>& service, bool allowIsolated, int32_t dumpPriority) { ::android::Parcel _aidl_data; _aidl_data.markForBinder(remoteStrong()); ::android::Parcel _aidl_reply; ::android::status_t _aidl_ret_status = ::android::OK; ::android::binder::Status _aidl_status; _aidl_ret_status = _aidl_data.writeInterfaceToken(getInterfaceDescriptor()); if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } _aidl_ret_status = _aidl_data.writeUtf8AsUtf16(name); if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } _aidl_ret_status = _aidl_data.writeStrongBinder(service); if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } _aidl_ret_status = _aidl_data.writeBool(allowIsolated); if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } _aidl_ret_status = _aidl_data.writeInt32(dumpPriority); if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } _aidl_ret_status = remote()->transact(BnServiceManager::TRANSACTION_addService, _aidl_data, &_aidl_reply, 0); if (UNLIKELY(_aidl_ret_status == ::android::UNKNOWN_TRANSACTION && IServiceManager::getDefaultImpl())) { return IServiceManager::getDefaultImpl()->addService(name, service, allowIsolated, dumpPriority); } if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } _aidl_ret_status = _aidl_status.readFromParcel(_aidl_reply); if (((_aidl_ret_status) != (::android::OK))) { goto _aidl_error; } if (!_aidl_status.isOk()) { return _aidl_status; } _aidl_error: _aidl_status.setFromStatusT(_aidl_ret_status); return _aidl_status; }
这里主要做了两件工作
a. 创建一个Parcel,然后写入token以及传入的参数
b. 调用remote()->transact,取出返回值
先来看写入的token是个什么东西,在android::os::IServiceManager.h中声明,在IServiceManager.cpp中实现,这两个宏在IInterface中定义,这个descriptor其实就是"android.os.IServiceManager"
#define DECLARE_META_INTERFACE(INTERFACE) \ public: \ static const ::android::String16 descriptor; \ #define DO_NOT_DIRECTLY_USE_ME_IMPLEMENT_META_INTERFACE(INTERFACE, NAME)\ const ::android::StaticString16 \ I##INTERFACE##_descriptor_static_str16(__IINTF_CONCAT(u, NAME));\ const ::android::String16 I##INTERFACE::descriptor( \ I##INTERFACE##_descriptor_static_str16); \
接下来看看remote()->transact都做了什么事情,先看remote是什么?
remote方法声明在BpRefBase当中
inline IBinder* remote() const { return mRemote; }
这个mRemote是什么?还需要从创建BpServiceManager那边看起
BpServiceManager::BpServiceManager(const ::android::sp<::android::IBinder>& _aidl_impl) : BpInterface<IServiceManager>(_aidl_impl){ } template<typename INTERFACE> inline BpInterface<INTERFACE>::BpInterface(const sp<IBinder>& remote) : BpRefBase(remote) { } BpRefBase::BpRefBase(const sp<IBinder>& o) : mRemote(o.get()), mRefs(nullptr), mState(0) { extendObjectLifetime(OBJECT_LIFETIME_WEAK); if (mRemote) { mRemote->incStrong(this); // Removed on first IncStrong(). mRefs = mRemote->createWeak(this); // Held for our entire lifetime. } }
上面获取ServiceManager时创建了一个handle为0的BpBinder,会一路传到BpRefBase中来,这个mRemote其实就是那个handle为0的BpBinder,所以调用的就是BpBinder的transact方法
status_t BpBinder::transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) { // Once a binder has died, it will never come back to life. if (mAlive) { // ...... status_t status; if (CC_UNLIKELY(isRpcBinder())) { status = rpcSession()->transact(rpcAddress(), code, data, reply, flags); } else { status = IPCThreadState::self()->transact(binderHandle(), code, data, reply, flags); } if (status == DEAD_OBJECT) mAlive = 0; return status; } return DEAD_OBJECT; } int32_t BpBinder::binderHandle() const { return std::get<BinderHandle>(mHandle).handle; }
看到BpBinder调用的是IPCThreadState的transact方法,第一个参数通过binderHandle获得,其实就是创建BpBinder时传入的handle 0,这个非常重要,binder驱动通过这个handle才能找到对应的server;第二个参数code,代表我们当前调用的方法的序号,第三个是已经打包为Parcel的参数,第四个是返回值
status_t IPCThreadState::transact(int32_t handle, uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) { // ...... status_t err; // ...... // 1、数据组织 err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, nullptr); if (err != NO_ERROR) { if (reply) reply->setError(err); return (mLastError = err); } if ((flags & TF_ONE_WAY) == 0) { if (UNLIKELY(mCallRestriction != ProcessState::CallRestriction::NONE)) { if (mCallRestriction == ProcessState::CallRestriction::ERROR_IF_NOT_ONEWAY) { ALOGE("Process making non-oneway call (code: %u) but is restricted.", code); CallStack::logStack("non-oneway call", CallStack::getCurrent(10).get(), ANDROID_LOG_ERROR); } else /* FATAL_IF_NOT_ONEWAY */ { LOG_ALWAYS_FATAL("Process may not make non-oneway calls (code: %u).", code); } } #if 0 if (code == 4) { // relayout ALOGI(">>>>>> CALLING transaction 4"); } else { ALOGI(">>>>>> CALLING transaction %d", code); } #endif if (reply) { // 2、写入数据,等待返回调用结果 err = waitForResponse(reply); } else { Parcel fakeReply; err = waitForResponse(&fakeReply); } #if 0 if (code == 4) { // relayout ALOGI("<<<<<< RETURNING transaction 4"); } else { ALOGI("<<<<<< RETURNING transaction %d", code); } #endif IF_LOG_TRANSACTIONS() { TextOutput::Bundle _b(alog); alog << "BR_REPLY thr " << (void*)pthread_self() << " / hand " << handle << ": "; if (reply) alog << indent << *reply << dedent << endl; else alog << "(none requested)" << endl; } } else { err = waitForResponse(nullptr, nullptr); } return err; }
IPCThreadState::transact 做了两件事情
a. 数据组织
b. 数据写入,等待RPC调用返回结果
先看数据是如何组织的:
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags, int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer) { binder_transaction_data tr; tr.target.ptr = 0; /* Don't pass uninitialized stack data to a remote process */ tr.target.handle = handle; tr.code = code; tr.flags = binderFlags; tr.cookie = 0; tr.sender_pid = 0; tr.sender_euid = 0; const status_t err = data.errorCheck(); if (err == NO_ERROR) { tr.data_size = data.ipcDataSize(); tr.data.ptr.buffer = data.ipcData(); tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t); tr.data.ptr.offsets = data.ipcObjects(); } else if (statusBuffer) { tr.flags |= TF_STATUS_CODE; *statusBuffer = err; tr.data_size = sizeof(status_t); tr.data.ptr.buffer = reinterpret_cast<uintptr_t>(statusBuffer); tr.offsets_size = 0; tr.data.ptr.offsets = 0; } else { return (mLastError = err); } mOut.writeInt32(cmd); mOut.write(&tr, sizeof(tr)); return NO_ERROR; }
其实从上面的代码来看,writeTransactionData并没有做数据写入的动作,而是把传入参数组织成为一个binder_transaction_data,这里多了一个cmd BC_TRANSACTION(我理解成Binder control transaction),最后将cmd 和 transaction_data写入到mOut Parcel当中。
接着看数据写入和等待调用结果:
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult) { uint32_t cmd; int32_t err; while (1) { // 1. 将数据写入给驱动等待执行并返回结果 if ((err=talkWithDriver()) < NO_ERROR) break; err = mIn.errorCheck(); if (err < NO_ERROR) break; if (mIn.dataAvail() == 0) continue; cmd = (uint32_t)mIn.readInt32(); // 2. 根据返回的cmd做对应的操作 switch (cmd) { case BR_ONEWAY_SPAM_SUSPECT: ALOGE("Process seems to be sending too many oneway calls."); CallStack::logStack("oneway spamming", CallStack::getCurrent().get(), ANDROID_LOG_ERROR); [[fallthrough]]; case BR_TRANSACTION_COMPLETE: if (!reply && !acquireResult) goto finish; break; case BR_DEAD_REPLY: err = DEAD_OBJECT; goto finish; case BR_FAILED_REPLY: err = FAILED_TRANSACTION; goto finish; case BR_FROZEN_REPLY: err = FAILED_TRANSACTION; goto finish; case BR_ACQUIRE_RESULT: { ALOG_ASSERT(acquireResult != NULL, "Unexpected brACQUIRE_RESULT"); const int32_t result = mIn.readInt32(); if (!acquireResult) continue; *acquireResult = result ? NO_ERROR : INVALID_OPERATION; } goto finish; case BR_REPLY: { binder_transaction_data tr; err = mIn.read(&tr, sizeof(tr)); ALOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY"); if (err != NO_ERROR) goto finish; if (reply) { if ((tr.flags & TF_STATUS_CODE) == 0) { reply->ipcSetDataReference( reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer), tr.data_size, reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets), tr.offsets_size/sizeof(binder_size_t), freeBuffer); } else { err = *reinterpret_cast<const status_t*>(tr.data.ptr.buffer); freeBuffer(nullptr, reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer), tr.data_size, reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets), tr.offsets_size/sizeof(binder_size_t)); } } else { freeBuffer(nullptr, reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer), tr.data_size, reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets), tr.offsets_size/sizeof(binder_size_t)); continue; } } goto finish; default: err = executeCommand(cmd); if (err != NO_ERROR) goto finish; break; } } finish: if (err != NO_ERROR) { if (acquireResult) *acquireResult = err; if (reply) reply->setError(err); mLastError = err; } return err; }
waitForResponse做了两件事,先将数据写给binder,等待完成调用并返回结果,然后解析返回结果中的cmd。这里主要看talkWithDriver是怎么做的:
status_t IPCThreadState::talkWithDriver(bool doReceive) { if (mProcess->mDriverFD < 0) { return -EBADF; } // 1. 组织binder_write_read,write_buffer指向mOut,read_buffer指向mIn binder_write_read bwr; // Is the read buffer empty? const bool needRead = mIn.dataPosition() >= mIn.dataSize(); // We don't want to write anything if we are still reading // from data left in the input buffer and the caller // has requested to read the next data. const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0; bwr.write_size = outAvail; bwr.write_buffer = (uintptr_t)mOut.data(); // This is what we'll read. if (doReceive && needRead) { bwr.read_size = mIn.dataCapacity(); bwr.read_buffer = (uintptr_t)mIn.data(); } else { bwr.read_size = 0; bwr.read_buffer = 0; } // Return immediately if there is nothing to do. if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR; bwr.write_consumed = 0; bwr.read_consumed = 0; status_t err; do {#if defined(__ANDROID__) // ioctl 将数据写给binder 驱动 if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0) err = NO_ERROR; else err = -errno; #else err = INVALID_OPERATION; #endif if (mProcess->mDriverFD < 0) { err = -EBADF; } IF_LOG_COMMANDS() { alog << "Finished read/write, write size = " << mOut.dataSize() << endl; } } while (err == -EINTR); if (err >= NO_ERROR) { if (bwr.write_consumed > 0) { if (bwr.write_consumed < mOut.dataSize()) LOG_ALWAYS_FATAL("Driver did not consume write buffer. " "err: %s consumed: %zu of %zu", statusToString(err).c_str(), (size_t)bwr.write_consumed, mOut.dataSize()); else { mOut.setDataSize(0); processPostWriteDerefs(); } } if (bwr.read_consumed > 0) { mIn.setDataSize(bwr.read_consumed); mIn.setDataPosition(0); }return NO_ERROR; } return err; }
将数据组织成为binder_write_read,数据的写入和返回都需要这个结构体对象,write_buffer指向mOut(数据写入),read_buffer指向mIn(数据返回),调用ioctl与驱动通信,结束后通过解析mIn中的cmd可以做出相应的动作并返回结果(BR_REPLY 理解为Binder Reply - Reply)
到这里Bp端的调用就结束了,贴上时序图
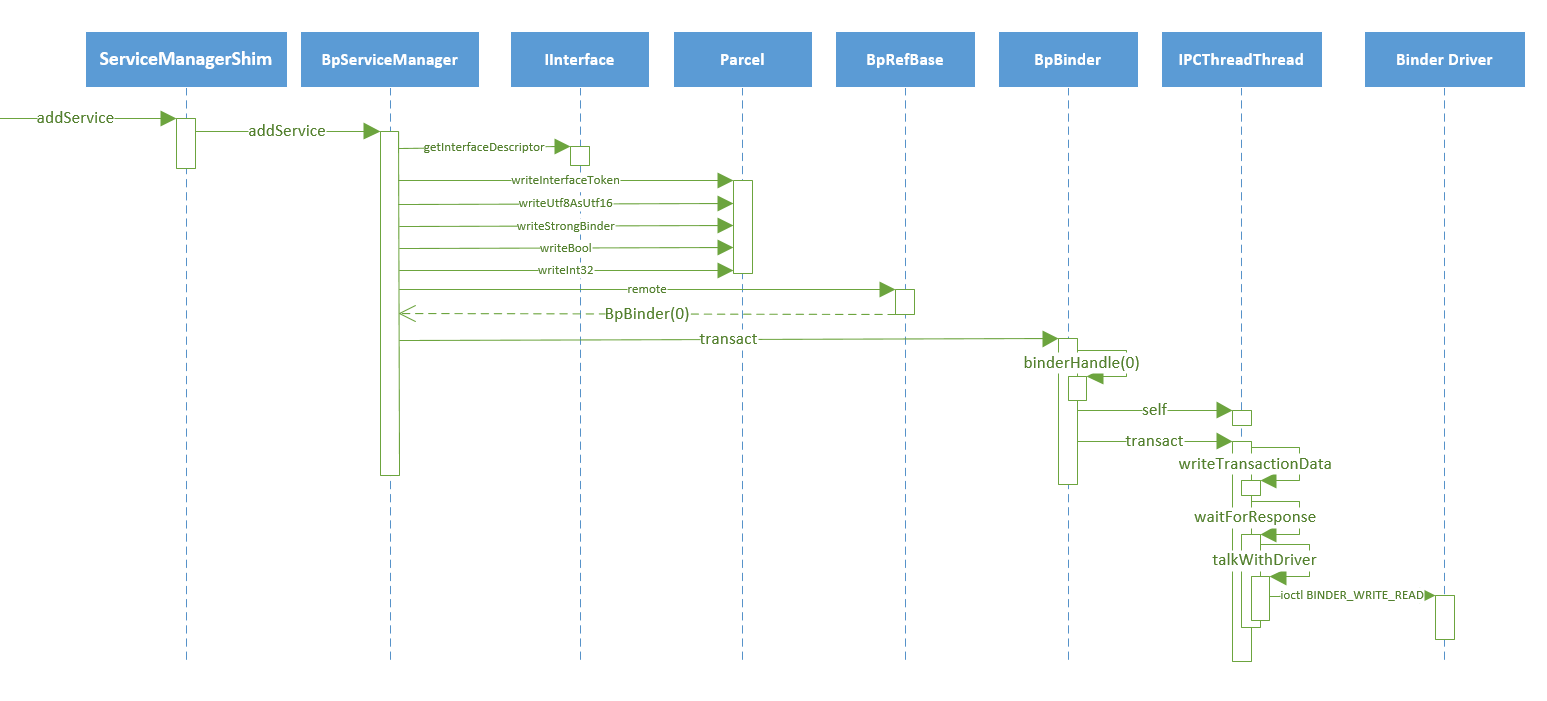
简化的过程:
调用BpServiceManager的具体方法(组织数据,调用BpBinder的transact方法),BpBinder调用IPCThreadState的transact方法与binder通信(ioctl)
4、客户端发出了请求,服务端如何响应?
这里就要看启动ServiceManager时Looper和callback相关的部分
int main() { // ...... sp<Looper> looper = Looper::prepare(false /*allowNonCallbacks*/); // 给Looper注册callback BinderCallback::setupTo(looper); ClientCallbackCallback::setupTo(looper, manager); // 无线循环监听 while(true) { looper->pollAll(-1); } } class BinderCallback : public LooperCallback { public: static sp<BinderCallback> setupTo(const sp<Looper>& looper) { // 实例化BinderCallback sp<BinderCallback> cb = sp<BinderCallback>::make(); int binder_fd = -1; // 获取binder_fd IPCThreadState::self()->setupPolling(&binder_fd); LOG_ALWAYS_FATAL_IF(binder_fd < 0, "Failed to setupPolling: %d", binder_fd); // 添加监听目标 int ret = looper->addFd(binder_fd, Looper::POLL_CALLBACK, Looper::EVENT_INPUT, cb, nullptr /*data*/); LOG_ALWAYS_FATAL_IF(ret != 1, "Failed to add binder FD to Looper"); return cb; } int handleEvent(int /* fd */, int /* events */, void* /* data */) override { // 调用handlePolledCommands处理回调 IPCThreadState::self()->handlePolledCommands(); return 1; // Continue receiving callbacks. } }; status_t IPCThreadState::setupPolling(int* fd) { if (mProcess->mDriverFD < 0) { return -EBADF; } // 开启ServiceManager的循环,开始工作 mOut.writeInt32(BC_ENTER_LOOPER); // 将命令写给driver flushCommands(); *fd = mProcess->mDriverFD; return 0; } void IPCThreadState::flushCommands() { if (mProcess->mDriverFD < 0) return; talkWithDriver(false); // The flush could have caused post-write refcount decrements to have // been executed, which in turn could result in BC_RELEASE/BC_DECREFS // being queued in mOut. So flush again, if we need to. if (mOut.dataSize() > 0) { talkWithDriver(false); } if (mOut.dataSize() > 0) { ALOGW("mOut.dataSize() > 0 after flushCommands()"); } }
Looper(Looper定义在libutils中)会监听ServiceManager进程中打开的binder_fd,有消息上来了会调用 handlePolledCommands处理。一开始看到这个方法觉得奇怪,为什么没有参数?后来想想可能Looper仅仅只是监听消息而已,之前也看到binder调用结束后会有数据写到mIn当中,通过IPCThreadState处理mIn中的数据就行。(每个进程都有自己的mOut和mIn,client进程的mOut对应server的mIn,mIn -> mOut)
接下来就看看handlePolledCommands这个方法:
status_t IPCThreadState::handlePolledCommands() { status_t result; do { result = getAndExecuteCommand(); } while (mIn.dataPosition() < mIn.dataSize()); processPendingDerefs(); flushCommands(); return result; }
核心方法就是getAndExecuteCommand方法
status_t IPCThreadState::getAndExecuteCommand() { status_t result; int32_t cmd; // 1. 从binder driver获取mIn数据 result = talkWithDriver(); if (result >= NO_ERROR) { size_t IN = mIn.dataAvail(); if (IN < sizeof(int32_t)) return result; cmd = mIn.readInt32(); IF_LOG_COMMANDS() { alog << "Processing top-level Command: " << getReturnString(cmd) << endl; } pthread_mutex_lock(&mProcess->mThreadCountLock); mProcess->mExecutingThreadsCount++; if (mProcess->mExecutingThreadsCount >= mProcess->mMaxThreads && mProcess->mStarvationStartTimeMs == 0) { mProcess->mStarvationStartTimeMs = uptimeMillis(); } pthread_mutex_unlock(&mProcess->mThreadCountLock); // 2. 解析出cmd,执行cmd result = executeCommand(cmd); pthread_mutex_lock(&mProcess->mThreadCountLock); mProcess->mExecutingThreadsCount--; if (mProcess->mExecutingThreadsCount < mProcess->mMaxThreads && mProcess->mStarvationStartTimeMs != 0) { int64_t starvationTimeMs = uptimeMillis() - mProcess->mStarvationStartTimeMs; if (starvationTimeMs > 100) { ALOGE("binder thread pool (%zu threads) starved for %" PRId64 " ms", mProcess->mMaxThreads, starvationTimeMs); } mProcess->mStarvationStartTimeMs = 0; } // Cond broadcast can be expensive, so don't send it every time a binder // call is processed. b/168806193 if (mProcess->mWaitingForThreads > 0) { pthread_cond_broadcast(&mProcess->mThreadCountDecrement); } pthread_mutex_unlock(&mProcess->mThreadCountLock); } return result; }
首先就是调用talkWithDriver读取driver发来的数据,然后解析出mIn中的cmd信息,调用executeCommand方法执行命令
status_t IPCThreadState::executeCommand(int32_t cmd) { BBinder* obj; RefBase::weakref_type* refs; status_t result = NO_ERROR; switch ((uint32_t)cmd) { // ...... case BR_TRANSACTION_SEC_CTX: case BR_TRANSACTION: { // 1、读取mIn中的数据到一个binder_transaction_data中 binder_transaction_data_secctx tr_secctx; binder_transaction_data& tr = tr_secctx.transaction_data; if (cmd == (int) BR_TRANSACTION_SEC_CTX) { result = mIn.read(&tr_secctx, sizeof(tr_secctx)); } else { result = mIn.read(&tr, sizeof(tr)); tr_secctx.secctx = 0; } ALOG_ASSERT(result == NO_ERROR, "Not enough command data for brTRANSACTION"); if (result != NO_ERROR) break; Parcel buffer; buffer.ipcSetDataReference( reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer), tr.data_size, reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets), tr.offsets_size/sizeof(binder_size_t), freeBuffer); const void* origServingStackPointer = mServingStackPointer; mServingStackPointer = &origServingStackPointer; // anything on the stack const pid_t origPid = mCallingPid; const char* origSid = mCallingSid; const uid_t origUid = mCallingUid; const int32_t origStrictModePolicy = mStrictModePolicy; const int32_t origTransactionBinderFlags = mLastTransactionBinderFlags; const int32_t origWorkSource = mWorkSource; const bool origPropagateWorkSet = mPropagateWorkSource; // Calling work source will be set by Parcel#enforceInterface. Parcel#enforceInterface // is only guaranteed to be called for AIDL-generated stubs so we reset the work source // here to never propagate it. clearCallingWorkSource(); clearPropagateWorkSource(); mCallingPid = tr.sender_pid; mCallingSid = reinterpret_cast<const char*>(tr_secctx.secctx); mCallingUid = tr.sender_euid; mLastTransactionBinderFlags = tr.flags; // ALOGI(">>>> TRANSACT from pid %d sid %s uid %d\n", mCallingPid, // (mCallingSid ? mCallingSid : "<N/A>"), mCallingUid); Parcel reply; status_t error; IF_LOG_TRANSACTIONS() { TextOutput::Bundle _b(alog); alog << "BR_TRANSACTION thr " << (void*)pthread_self() << " / obj " << tr.target.ptr << " / code " << TypeCode(tr.code) << ": " << indent << buffer << dedent << endl << "Data addr = " << reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer) << ", offsets addr=" << reinterpret_cast<const size_t*>(tr.data.ptr.offsets) << endl; } if (tr.target.ptr) { // We only have a weak reference on the target object, so we must first try to // safely acquire a strong reference before doing anything else with it. if (reinterpret_cast<RefBase::weakref_type*>( tr.target.ptr)->attemptIncStrong(this)) { error = reinterpret_cast<BBinder*>(tr.cookie)->transact(tr.code, buffer, &reply, tr.flags); reinterpret_cast<BBinder*>(tr.cookie)->decStrong(this); } else { error = UNKNOWN_TRANSACTION; } } else { // 2、调用BBinder的transact方法 error = the_context_object->transact(tr.code, buffer, &reply, tr.flags); } //ALOGI("<<<< TRANSACT from pid %d restore pid %d sid %s uid %d\n", // mCallingPid, origPid, (origSid ? origSid : "<N/A>"), origUid); if ((tr.flags & TF_ONE_WAY) == 0) { LOG_ONEWAY("Sending reply to %d!", mCallingPid); if (error < NO_ERROR) reply.setError(error); constexpr uint32_t kForwardReplyFlags = TF_CLEAR_BUF; // 3、将返回的结果重新发给binder sendReply(reply, (tr.flags & kForwardReplyFlags)); } else { if (error != OK) { alog << "oneway function results for code " << tr.code << " on binder at " << reinterpret_cast<void*>(tr.target.ptr) << " will be dropped but finished with status " << statusToString(error); // ideally we could log this even when error == OK, but it // causes too much logspam because some manually-written // interfaces have clients that call methods which always // write results, sometimes as oneway methods. if (reply.dataSize() != 0) { alog << " and reply parcel size " << reply.dataSize(); } alog << endl; } LOG_ONEWAY("NOT sending reply to %d!", mCallingPid); } mServingStackPointer = origServingStackPointer; mCallingPid = origPid; mCallingSid = origSid; mCallingUid = origUid; mStrictModePolicy = origStrictModePolicy; mLastTransactionBinderFlags = origTransactionBinderFlags; mWorkSource = origWorkSource; mPropagateWorkSource = origPropagateWorkSet; IF_LOG_TRANSACTIONS() { TextOutput::Bundle _b(alog); alog << "BC_REPLY thr " << (void*)pthread_self() << " / obj " << tr.target.ptr << ": " << indent << reply << dedent << endl; } } break; // ...... default: ALOGE("*** BAD COMMAND %d received from Binder driver\n", cmd); result = UNKNOWN_ERROR; break; } if (result != NO_ERROR) { mLastError = result; } return result; }
这个方法很长,主要是case很多,这里只摘出最主要的BR_TRANSACTION(对应BC_TRANSACTION)来看看。注释了三个地方,解析数据,调用BBinder的transact方法,调用sendReply将数据发回去,重点看后面两个方法
a. BBinder::transact
status_t BBinder::transact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) { data.setDataPosition(0); if (reply != nullptr && (flags & FLAG_CLEAR_BUF)) { reply->markSensitive(); } status_t err = NO_ERROR; switch (code) { case PING_TRANSACTION: err = pingBinder(); break; case EXTENSION_TRANSACTION: err = reply->writeStrongBinder(getExtension()); break; case DEBUG_PID_TRANSACTION: err = reply->writeInt32(getDebugPid()); break; default: // 走到onTransact当中 err = onTransact(code, data, reply, flags); break; } // In case this is being transacted on in the same process. if (reply != nullptr) { reply->setDataPosition(0); } return err; }
onTransact的方法在BBinder.h中被声明,在生成文件IServiceManager.cpp中被实现
::android::status_t BnServiceManager::onTransact(uint32_t _aidl_code, const ::android::Parcel& _aidl_data, ::android::Parcel* _aidl_reply, uint32_t _aidl_flags) { ::android::status_t _aidl_ret_status = ::android::OK; switch (_aidl_code) { // ...... case BnServiceManager::TRANSACTION_addService: { ::std::string in_name; ::android::sp<::android::IBinder> in_service; bool in_allowIsolated; int32_t in_dumpPriority; if (!(_aidl_data.checkInterface(this))) { _aidl_ret_status = ::android::BAD_TYPE; break; } _aidl_ret_status = _aidl_data.readUtf8FromUtf16(&in_name); if (((_aidl_ret_status) != (::android::OK))) { break; } _aidl_ret_status = _aidl_data.readStrongBinder(&in_service); if (((_aidl_ret_status) != (::android::OK))) { break; } _aidl_ret_status = _aidl_data.readBool(&in_allowIsolated); if (((_aidl_ret_status) != (::android::OK))) { break; } _aidl_ret_status = _aidl_data.readInt32(&in_dumpPriority); if (((_aidl_ret_status) != (::android::OK))) { break; } ::android::binder::Status _aidl_status(addService(in_name, in_service, in_allowIsolated, in_dumpPriority)); _aidl_ret_status = _aidl_status.writeToParcel(_aidl_reply); if (((_aidl_ret_status) != (::android::OK))) { break; } if (!_aidl_status.isOk()) { break; } } break; // ...... default: { _aidl_ret_status = ::android::BBinder::onTransact(_aidl_code, _aidl_data, _aidl_reply, _aidl_flags); } break; } if (_aidl_ret_status == ::android::UNEXPECTED_NULL) { _aidl_ret_status = ::android::binder::Status::fromExceptionCode(::android::binder::Status::EX_NULL_POINTER).writeToParcel(_aidl_reply); } return _aidl_ret_status; }
这里只看 TRANSACTION_addService 这个分支,解析了数据之后调用addService方法,记录传进来的IBinder对象到map中。
status_t IPCThreadState::sendReply(const Parcel& reply, uint32_t flags) { status_t err; status_t statusBuffer; err = writeTransactionData(BC_REPLY, flags, -1, 0, reply, &statusBuffer); if (err < NO_ERROR) return err; return waitForResponse(nullptr, nullptr); }
sendReply就比较简单了,将reply数据再次写给binder驱动,cmd为BC_REPLY
到这里服务端的处理就结束了,同样的贴一张时序图:
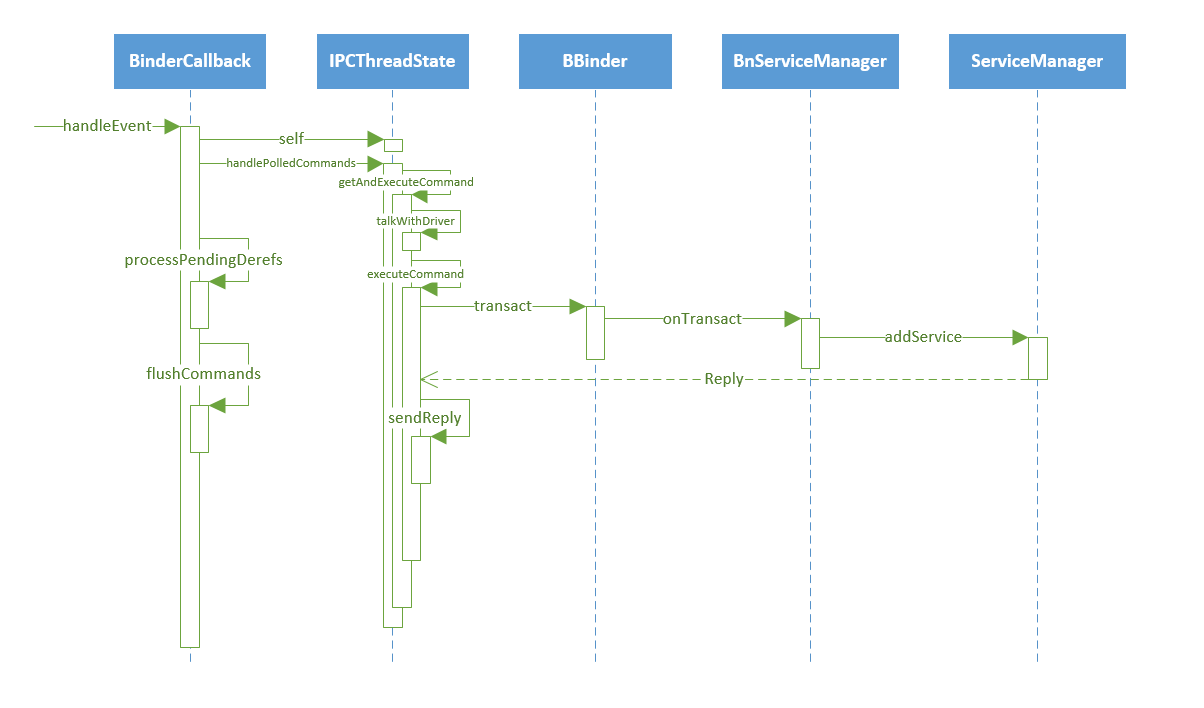
还要看下ProcessState和IPCThreadState的关系:ProcessState负责打开Binder驱动、做mmap映射,IPCThreadState负责与Binder驱动进行具体的命令交互。
还有个问题:binder驱动是如何根据handle找到server端并把数据发过去的,这个以后有机会再研究!
这篇学习笔记仅供参考,错误可能较多!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号