二、 扩散模型(Diffusion Model)的训练过程
以下内容参考了Lil'Log 和李宏毅老师的课程
对于任何一个模型,都会分为两个过程:这篇文章主要聚焦于扩散模型的训练过程,而后面的文章将会聚焦于扩散模型的测试过程。
1. 前向过程与反向过程
训练过程中,我们需要向不含任何噪音的图片\(\mathbf{x}_0\)中加噪,是从 到
到 ,再到
,再到 的过程。这个过程称为前向过程,也叫做扩散过程。
的过程。这个过程称为前向过程,也叫做扩散过程。
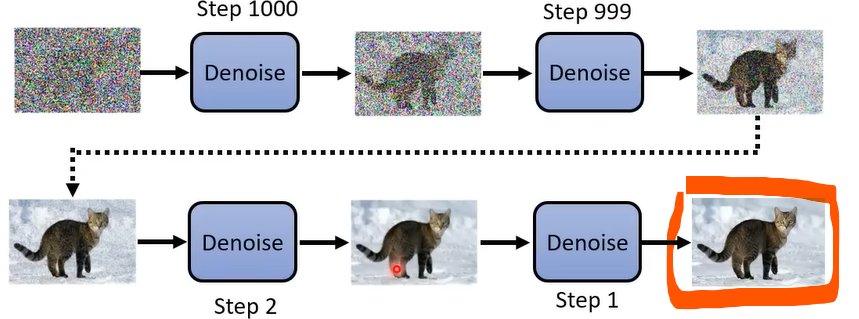
测试过程中,我们需要从一个全是噪音的图片\(\mathbf{x}_T\)开始,逐渐降噪,最终生成想要的图片,是从到,再到的过程。这个过程称为反向过程,也叫做逆扩散过程。
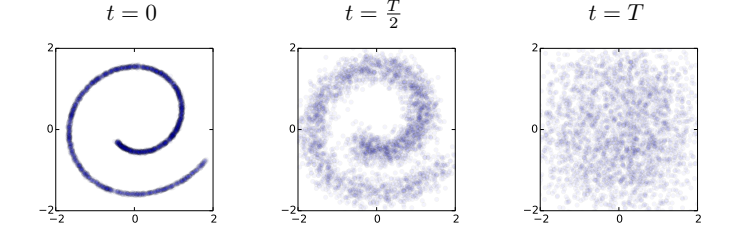
为什么向图片中加噪叫做扩散过程?
想象一滴墨水倒在了水中,这滴墨水会在水中逐渐扩散,最终化在水中。
这个过程也可以理解为墨水从有序变得无序的过程。
同样的,如果我们有一张图片,那么我们可以向图片中添加噪音,使得图片从有序变得无序
就像墨水在水中扩散一样,因此叫做扩散过程。
2. 扩散模型的训练过程
训练过程的目的是:训练出一个可以预测噪音的模型
Noise Predicter。训练结束后,使用Noise Predicter,可以生成我们想要的图片。
在论文中,扩散模型的训练过程如下
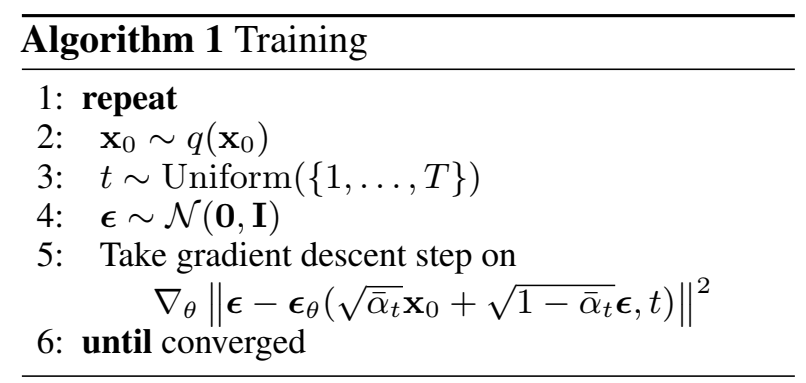
训练过程第2步

-
目的:
生成一张不带任何噪音的图片\(\mathbf{x}_0\)。
例如,下图中,红色框的图片就是不带任何噪音的图片。
-
公式讲解:
\(q(\mathbf{x}_0)\)表示\(\mathbf{x}_0\)的满足的分布为\(q(\mathbf{x}_0)\),因此\(\mathbf{x}_0\sim q(\mathbf{x}_0)\)表示从分布\(q(\mathbf{x}_0)\)中抽取一张图片\(\mathbf{x}_0\)。
若\(t\)时刻的图片为\(\mathbf{x}_t\),那么\(\mathbf{x}_0\)是不带任何噪音的图片;\(\mathbf{x}_T\)是完全是噪音的图片,从\(\mathbf{x}_0\)到\(\mathbf{x}_T\),图片中的噪音逐渐增加
训练过程第3,4步

-
目的:
从\([1,T]\)中随机抽取一个时刻\(t\);并且从标准正态分布中,采样出噪音\(\boldsymbol {\epsilon}\)
-
公式讲解:
\(t \sim \operatorname{Uniform}(\{1, \ldots, T\})\)表示从1到\(T\)的均匀分布中采样出一个\(t\);\(\boldsymbol{\epsilon} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\)从标准正态分布中,采样出噪音\(\boldsymbol {\epsilon}\)。因为噪音\(\boldsymbol {\epsilon}\)是一个矩阵,所以在公式\(\boldsymbol{\epsilon} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})\)中,\(\mathbf{0}\)表示零矩阵,\(\mathbf{I}\)表示单位矩阵。
训练过程第5步

-
目的:
计算损失函数关于参数\(\theta\)的梯度,从而更新参数参数\(\theta\)
-
公式讲解:
-
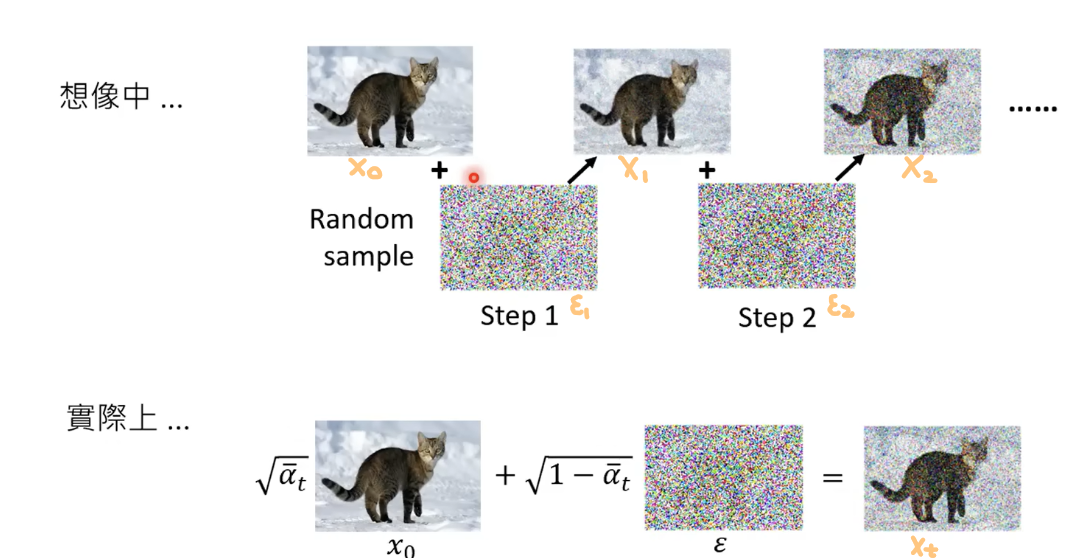
\(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}\)表示\(t\)时刻的图片\(\mathbf{x}_t\),其中\(\bar{\alpha_t}\)是一个常量。
可以看到,这和我们上一篇文章中说的不太一样,对于\(\mathbf{x}_t\)的生成,不需要一步一步的从\(\mathbf{x}_0\)是生成\(\mathbf{x}_1\) ,从\(\mathbf{x}_1\)生成\(\mathbf{x}_2\) ...从\(\mathbf{x}_{t-1}\)生成\(\mathbf{x}_t\),而是可以直接从\(\mathbf{x}_0\)生成\(\mathbf{x}_t\)。
-
\(\boldsymbol{\epsilon}_\theta\)就是上一篇文章说的
Noise Predicter,即预测噪声的模型。它有两个输入:\(t\)时刻的图片\(\mathbf{x}_t\)(\(\mathbf{x_t} = \sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}\)),以及时刻\(t\)。
它的输出是:对噪音\(\boldsymbol{\epsilon }\)的预测值,记作\(\hat{\boldsymbol{\epsilon }}\)。
Noise Predicter的输出也和上一篇文章不太一样。由于可以从\(\mathbf{x}_0\)直接生成\(\mathbf{x}_t\),因此Noise Predicter的输出变成了从 0 时刻到 \(t\) 时刻,加入的噪音总和 \(\hat{\boldsymbol{\epsilon }}\) ;而不再是从 \(t-1\) 时刻到 \(t\) 时刻加入的噪音。 -
\(\left\|\boldsymbol{\epsilon}-\boldsymbol{\epsilon}_\theta\left(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}, t\right)\right\|^2\),也就是\(||\boldsymbol{\epsilon}-\hat{\boldsymbol{\epsilon}}||^2\),表示模型的损失函数是均方误差损失,可以记作\(L_t\)。
-
\(\nabla_\theta\left\|\boldsymbol{\epsilon}-\boldsymbol{\epsilon}_\theta\left(\sqrt{\bar{\alpha}_t} \mathbf{x}_0+\sqrt{1-\bar{\alpha}_t} \boldsymbol{\epsilon}, t\right)\right\|^2\),也就是\(\frac{\partial L_t}{\partial \theta}\),表示损失函数\(L_t\)对参数\(\theta\)的梯度。
-
训练过程伪代码
训练过程的伪代码如下:
while True:
# 第2步
挑出一张没有噪音的图片x_0
# 第3步
在[1,T]中,随机选出一个时刻t
# 第4步
生成一个噪音ε
# 第5步
生成t时刻的图片x_t
y_pred = ε_θ(x_t,t) # 预测噪音的模型是ε_θ,y_pred为ε_θ输出的预测值
y = ε # 真实值是噪音ε
loss = (y-y_pred)**2
计算loss关于参数θ的损失
更新参数θ
# 第6步
if 模型ε_θ 已经收敛:
break
3. 为什么可以从0时刻的图片\(\mathbf{x}_0\)直接生成t时刻的图片\(\mathbf{x}_t\)?
从 \(\mathbf{x}_{t-1}\) 到 \(\mathbf{x}_t\)
设\(t\)时刻的图片为\(\mathbf{x}_t\),\(t-1\)时刻的图片为\(\mathbf{x}_{t-1}\),\(t-1\)时刻向\(t\)时刻加入的噪音为\(\boldsymbol{\epsilon}_{t}\),并且假设\(\boldsymbol{\epsilon}_{t}\sim N(0,1)\),扩散模型规定,将噪音\(\boldsymbol{\epsilon}_{t}\)加入到图像\(\mathbf{x}_{t-1}\)中的公式为:
其中\(\beta_t\)是一个常数,并且从\(t=0\)到\(t=T\),\(\beta_t\)的值逐渐增大。这代表着,从\(t=0\)到\(t=T\),向图片中增加的噪音越来越多。
若一开始的清晰的图片为\(\mathbf{x}_0\),根据公式(1),我们就可以逐步加噪,最终生成充满噪音的图片\(\mathbf{x}_T\)。
从 $\mathbf{x}_{0} $到 \(\mathbf{x}_t\)
考虑这样一个问题,如果逐步迭代:根据\(\mathbf{x}_0\)计算\(\mathbf{x}_1\),根据\(\mathbf{x}_1\)计算\(\mathbf{x}_2\),...,这样的速度也太慢了。
所以,我们可以考虑简化一下公式,最好是能够推导出直接从\(\mathbf{x}_0\)生成\(\mathbf{x}_T\)的公式。
我们将常数\(\beta_t\)换一种表达方式,令\(\alpha_t = 1-\beta_t\),那么根据公式(1),我们可以得到
将公式(3)带入到公式(2)中,可以得到
因为\(\boldsymbol{\epsilon}_{t}\sim N(0,1)\),\(\boldsymbol{\epsilon}_{t-1}\sim N(0,1)\),因此,\(\left[\sqrt{\alpha_t\left(1-\alpha_{t-1}\right)} \boldsymbol{\epsilon}_{t-1}+\sqrt{1-a_t} \times \boldsymbol{\epsilon}_t\right]\sim N\left(0,1-\alpha_t \alpha_{t-1}\right)\)
如果我们另设一个噪音\(\boldsymbol{\epsilon}\sim N(0,1)\),那么\(\sqrt{1-\alpha_t \alpha_{t-1}} \boldsymbol{\epsilon}\sim N(0,1-\alpha_t \alpha_{t-1})\)
因此,我们可以令\(\left[\sqrt{\alpha_t\left(1-\alpha_{t-1}\right)} \boldsymbol{\epsilon}_{t-1}+\sqrt{1-a_t} \times \boldsymbol{\epsilon}_t\right] = \sqrt{1-\alpha_t \alpha_{t-1}} \boldsymbol{\epsilon}\)
上面这种改写方式被称为“重参数化技巧”。
于是可以得到从\(\mathbf{x}_{t-2}\)得到\(\mathbf{x}_t\)的公式
不断重复上面的过程,最终我们可以得到从\(\mathbf{x}_0\)到\(\mathbf{x}_t\)的公式
其中,\(\bar{\alpha}_t=\alpha_t \alpha_{t-1} \alpha_{t-2} \alpha_{t-3} \ldots \alpha_2 \alpha_1 = \prod_{i=1}^{t}\alpha_i\),\(\boldsymbol\epsilon\sim N(0,1)\)。
至此,我们得到前向过程的公式,即公式(4)
我们前面说过,\(\beta_1<\beta_2<\cdots<\beta_T\),因此\(\bar{\alpha}_1>\cdots>\bar{\alpha}_T\)。当\(t=T\)时,\(\bar{\alpha}_T \approx 0\),\(\mathbf{x}_T \approx \boldsymbol\epsilon\),即\(\mathbf{x}_T\)可以近似认为服从标准正态分布。
概率密度函数 \(q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)\) 以及 \(q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)\)
根据公式(1),我们可以得到,在前向过程中,在已知\(\mathbf{x}_{t-1}\)的条件下,\(\mathbf{x}_t\)的概率密度函数\(q\left(\mathbf{x}_t \mid \mathbf{x}_{t-1}\right)=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{1-\beta_t} \mathbf{x}_{t-1}, \beta_t \mathbf{I}\right)\)
根据公式(4),我们可以得到,在前向过程中,在已知\(\mathbf{x}_{0}\)的条件下,\(\mathbf{x}_t\)的概率密度函数\(q\left(\mathbf{x}_t \mid \mathbf{x}_0\right)=\mathcal{N}\left(\mathbf{x}_t ; \sqrt{\bar{\alpha}_t} \mathbf{x}_0,\left(1-\bar{\alpha}_t\right) \mathbf{I}\right)\)
\(\mathcal{N}\left(\mathbf{x}_t ; \sqrt{\bar{\alpha}_t} \mathbf{x}_0,\left(1-\bar{\alpha}_t\right) \mathbf{I}\right)\)表示随机变量为\(\mathbf{x}_t\),均值为\(\sqrt{\bar{\alpha}_t} \mathbf{x}_0\),方差为\(\left(1-\bar{\alpha}_t\right) \mathbf{I}\)的正态分布。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号