控制之美1-第七章 PID控制
7.1 引子
\(u(t)\) 是体重变化,
\(u(t)=E_i-E_a\), \(E_i\) 是热 量摄入 ,\(E_a\) 是运动消耗,
\(x(t)\) 系统输出,体重
\(a\)是劳动强度系数
\(d(t)=-aC\) 是扰动量
进行拉普拉斯变换
\(x_0\) 是初始体重,
传递函数
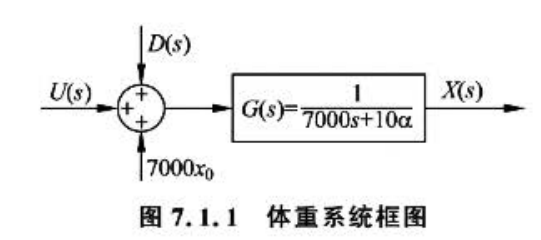
其中\(U(s)\) 和 \(D(s)\)是以 阶跃形式作用在系统上 ,
初 始状态\(7000x_0\),则是以 冲激方 式作用 在系统上。
\(G(s)\) 的特征方程为
7.2 比例控制
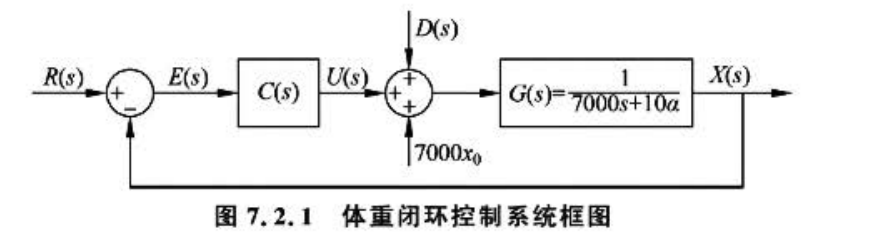
r(t)是目标体重(参考值),r(t)=r=65kg,对应的拉普拉斯变换\(R(s)=\frac{r}{s}\)
\(e(t)=r(t)-x(t)\)是误差(参考值与输出之家的差距),对应的拉普拉斯变换\(E(s)=R(s)-X(s)\)
\(C(s)\)是控制器,包含了我们需要设计的算法
人们在控制体重时会很自然地想到一种 策略-当体重大于目标值的时候, 那就多运动.
少吃饭 ,而且超重得越多 ,就越要多运动, 越要少吃饭, 反之亦然。 这 种简单粗暴的策略被
称为比例控制( Proportionz Controller) .
比例控制是一种简单的控制方式,其控制量为误差的线性函数:
\(K_{P}\) 为比例增益, $ e(t)$ 为误差。
在拉普拉斯变换域中,比例控制可以表示为:

此时,系统的输出可以表达为:
根据前面的定义,\(d(t)=-\alpha C\),可得\(D(s)=-\frac{\alpha C}{s}\)。又已知\(R(s)=\frac{r}{s}\),式(7.2.2)变为:
根据式(7.2.3),\(X(s)\)有两个极点,分别为\(s_{p1}=0\)和\(s_{p2}=-\frac{10\alpha + K_p}{7000}\)。其中,\(s_{p1}\)是输入\(U(s)\)和扰动\(D(s)\)的极点,\(s_{p2}\)是闭环传递函数的极点。对式(7.2.3)进行部分分式分解,可得:
对式(7.2.4)进行拉普拉斯逆变换,得到:
在式(7.2.5)中,输出\(x(t)\)的稳定性与传递函数的极点\(s_{p2}=-\frac{10\alpha + K_p}{7000}\)相关。在本例中,\(K_p>0\),因此\(s_{p2}<0\)。说明随着时间的增加,\(e^{-\frac{K_p + 10\alpha}{7000}t}\)项将趋于零。因此,可以通过式(7.2.5)得到系统输出的终值,即:
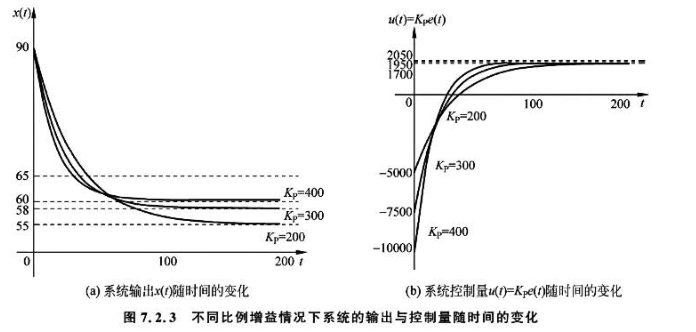
图7.2.3(a)呈现了在不同\(K_p\)下系统输出\(x(t)\)随时间的变化(其中,初始体重\(x_0 = 90kg\),目标体重\(r = 65kg\),其余条件参考表7.1.1案例1)。式(7.2.6)和图7.2.3(a)说明比例增益\(K_p\)越大,系统的终值\(x(\infty)\)越接近于参考值\(r\)。图7.2.3(b)显示了不同\(K_p\)下的系统控制量\(u(t)\)随时间的变化。
图片中的文字主要是关于控制系统中稳态误差(Steady State Error)的推导和分析。
-
稳态误差的定义和推导
- 稳态误差\(e_{ss}\)定义为系统误差的终值,即\(e_{ss}=e(\infty)=r - x(\infty)\),其中\(r\)是参考输入,\(x(\infty)\)是系统输出的终值。
- 根据之前的推导(7.2.6),\(x(\infty)=\frac{K_p r - \alpha C}{K_p + 10 \alpha}\)。
- 将\(x(\infty)\)代入稳态误差的定义式,得到:\[e_{ss}=r - \frac{K_p r - \alpha C}{K_p + 10 \alpha}=\frac{10 \alpha r + \alpha C}{K_p + 10 \alpha} \]
- 这表明比例增益\(K_p\)越大,稳态误差\(e_{ss}\)越小,与图7.2.3(a)所示的现象一致(\(K_p\)越大,输出的终值\(x(\infty)\)越靠近参考值\(r\))。
- 当\(K_p \to \infty\)时,\(e_{ss}=0\)。
-
实际情况中的限制
- 在实际情况中,\(K_p\)不可能无限地增大,例如在这个例子中每天的热量摄入和运动都是有限的。
- 这决定了比例控制的局限性,它无法消除稳态误差。需要引入新的手段和方法来解决这个问题。
总的来说,这段文字通过数学推导说明了比例控制下稳态误差与比例增益\(K_p\)的关系,并指出了在实际应用中比例控制的局限性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号