

概率图模型
机器学习最重要的任务,是根据一些已观察到的证据(例如训练样本)来对感兴趣的未知变量(例如类别标记)进行估计和推测。概率模型提供了一种描述框架,将学习任务归结于计算变量的概率分布。
在概率模型中,利用已知变量推测未知变量的分布称为“推断”,其核心是如何基于可观测变量推测出未知变量的条件分布.
- 监督学习(如 SVM):
目标:学习输入到输出的映射关系。
实现:直接从数据到标签的映射。
优点:简单高效,适用于标签明确的任务。 - 推断学习:
目标:通过隐变量解释观测数据的生成过程。
实现:建模观测数据和隐变量之间的关系。
优点:能够解释数据的内在结构,处理不确定性。
在存在隐变量的情况下,通过观测数据推断隐变量的分布或状态。
通过隐变量来解释观测数据
最终目的都是由已知数据来得到一些类似于分类模型的概念
概率图模型是一类用图来表达变量相关关系的概率模型,图为表示工具,最常见的是用一个结点表示一个或一组随机变量,结点之间的边表示变量间的概率相关关系,即“变量关系图”
根据边的性质不同,概率图模型可大致分为两类:第一类是使用有向无环图表示变量间的依赖关系,称为有向图模型或贝叶斯网;第二类是使用无向图表示变量间的相关关系,称为无向图模型或马尔可夫网
若变量间存在显式的因果关系,则常使用贝叶斯网;若变量存在相关性,但难以获得显式的因果关系,则常使用马尔可夫网
隐马尔可夫模型(HMM)
HMM是结构最简单的动态贝叶斯网,是一种有向图模型
隐马尔可夫模型中的变量可分为两组,第一组是状态变量\({y_1,y_2,\ldots,y_n}\),其中\(y_i\)表示第i时刻的系统状态,一般假定状态变量是隐藏的、不可观测的,因此状态变量又称隐变量,同时状态变量\(y_i\)的取值范围\mathcal{Y},称为状态空间,通常是有N个可能取值的离散空间;第二组是观测变量\({x_1,x_2,\ldots,x_n}\),其中\(x_i\)表示第i时刻的观测值
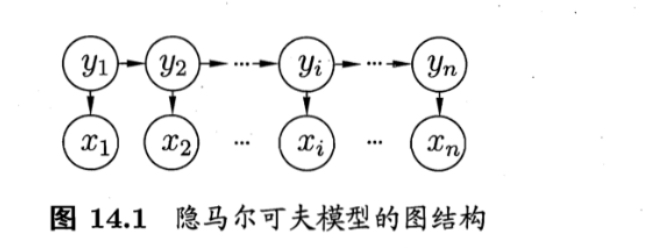
隐马尔可夫模型中,观测变量的取值仅依赖于状态变量,即\(x_i\)唯一由\(y_i\)决定,同时,\(y_t\)仅依赖于\(y_{t-1}\),即系统下一时刻的状态仅由当前状态状态决定,基于这种依赖关系,所有变量的联合概率分布为$P(x_1, y_1, \ldots, x_n, y_n) = P(y_1) P(x_1 \mid y_1) \prod_{i=2}^{n} P(y_i \mid y_{i-1}) P(x_i \mid y_i) $
以上的是图结构相关的信息,但依据概率分布公式也可以得到,确定一个隐马尔可夫模型还需要如下三组参数:状态转移概率、输出观测概率以及初始状态概率

隐马尔可夫模型的三个基本问题是:
评估问题:计算观测序列的概率,使用前向算法或后向算法。
解码问题:找到最优的隐状态序列,使用维特比算法。
学习问题:估计模型参数,使用Baum-Welch算法。
评估问题与学习问题的区别
目标不同:
评估问题:计算给定模型下得到当前观测序列的概率。
学习问题:估计模型参数,使得观测序列的似然度最大化。
应用场景不同:
评估问题:用于模型评估、序列分类或比较不同模型的拟合程度。
学习问题:用于从数据中训练隐马尔可夫模型,是模型构建阶段的核心任务。
马尔可夫随机场
MRF是典型的马尔可夫网,是一种无向图模型
马尔可夫随机场有一组势函数,亦称因子,这是定义在变量子集上的非负实函数,主要用于定义概率分布模型
在马尔可夫随机场中,对于图中结点的一个子集,若其中任意两结点间都有边连接,则称该结点子集为一个“团” . 若在一个团中加入另外任何一个结点都不再形成团,则称该团为“极大团”;换言之,极大团就是不能被其他团所包含的团。也就是图论中的连通分量概念
每个结点至少出现在一个极大团中
在马尔可夫随机场中,多个变量之间的联合概率分布能基于团分解为多个因子的乘积,每个因子仅与一个团相关。具体来说,对于 \(n\) 个变量 \(\mathbf{x} = \{x_1, x_2, \ldots, x_n\}\),所有团构成的集合为 \(\mathcal{C}\),与团 \(Q \in \mathcal{C}\) 对应的变量集合记为 \(\mathbf{x}_Q\),则联合概率 \(P(\mathbf{x})\) 定义为
$ P(\mathbf{x}) = \frac{1}{Z} \prod_{Q \in \mathcal{C}} \psi_Q(\mathbf{x}_Q) $
其中 \(\psi_Q\) 为与团 \(Q\) 对应的势函数,用于对团 \(Q\) 中的变量关系进行建模,\(Z = \sum_{\mathbf{x}} \prod_{Q \in \mathcal{C}} \psi_Q(\mathbf{x}_Q)\) 为规范化因子,以确保 \(P(\mathbf{x})\) 是被正确定义的概率。在实际应用中,精确计算 \(Z\) 通常很困难,但许多任务往往并不需获得 \(Z\) 的精确值。
势函数量化团内变量的相容性或亲和度(密切度),值越大表示该配置越可能,也就是将团中的变量取值集合映射到一个非负值上
显然,若变量个数较多,则团的数目将会很多(例如,所有相互连接的两个变量都会构成团),这就意味着上式会有很多乘积项,显然会给计算带来负担。注意到若团 \(Q\) 不是极大团,则它必被一个极大团 \(Q^*\) 所包含,即 \(\mathbf{x}_Q \subseteq \mathbf{x}_{Q^*}\);这意味着变量 \(\mathbf{x}_Q\) 之间的关系不仅体现在势函数 \(\psi_Q\) 中,还体现在 \(\psi_{Q^*}\) 中。于是,联合概率 \(P(\mathbf{x})\) 可基于极大团来定义。假定所有极大团构成的集合为 \(\mathcal{C}^*\),则有
\(P(\mathbf{x}) = \frac{1}{Z^*} \prod_{Q \in \mathcal{C}^*} \psi_Q(\mathbf{x}_Q)\)
因子并不是定义在节点上,而是定义在变量子集(团)上的,因为极大团保证了是唯一且独立的,因此可以确保每个因子仅与一个(极大)团相关
于是,相当于对联合概率分布对应的图进行最大连通分量分解,基于这个分解结果和因子来计算
马尔可夫随机场中的条件独立性
若从结点集 A中的结点到B中的结点都必须经过结点集C中的结点,则称结点集 A和B被结点集C分离,C称为“分离集”
对马尔可夫随机场,有
- 全局马尔可夫性:给定两个变量子集的分离集,则这两个变量子集条件独立
由此有两个推论:
-
局部马尔可夫性: 给定某变量的邻接变量,则该变量条件独立于其他变量。形式化地说,令 \(V\) 为图的结点集,\(n(v)\) 为结点 \(v\) 在图上的邻接结点,\(n^*(v) = n(v) \cup \{v\}\),有 \(\mathbf{x}_v \perp \mathbf{x}_{V \setminus n^*(v)} \mid \mathbf{x}_{n(v)}\)。
-
成对马尔可夫性: 给定所有其他变量,两个非邻接变量条件独立。形式化地说,令图的结点集和边集分别为 \(V\) 和 \(E\),对图中的两个结点 \(u\) 和 \(v\),若 \(\langle u, v \rangle \notin E\),则 \(\mathbf{x}_u \perp \mathbf{x}_v \mid \mathbf{x}_{V \setminus \{u, v\}}\)。
(整个马尔可夫随机场保证了连通性,因此如果两个节点之间没有连边,那么这两个节点一定是相互独立的)
条件随机场
CRF是一种判别式无向图模型
前两种方法都是生成式模型,也就是直接对联合分布进行建模,而判别式模型则是对条件分布进行建模
条件随机场试图对多个变量在给定观测值后对条件概率进行建模,可以看作是给定观测值的马尔可夫随机场
因此,类似地,条件随机场也使用团上的势函数来定义概率
MRF:建模的是变量之间的联合概率分布 P(Y),其中 Y 是所有随机变量的集合。它通过无向图表示变量之间的依赖关系,并假设每个变量在其邻居的条件下与其他变量独立。
CRF:建模的是给定观测序列 X 时,标签序列 Y 的条件概率分布 P(Y|X)。它同样使用无向图来表示标签之间的依赖关系,但这种依赖关系是在观测序列 X 的条件下建立的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号