STL容器读书笔记
vector
vector维护的是一个连续线性空间
vector是动态空间,随着元素的加入会自动扩容,扩充至当前size的两倍,然后将原内容拷贝,开始在原内容之后构造新元素,并释放空间
vector提供的迭代器是 random access iterators 随机访问迭代器,vector迭代器是普通指针
list
list插入和结合(splice)操作都不会造成原有的list迭代器失效
list不能用是STL算法sort,必须使用自己的sort,因为STL sort只接受random access iterators 随机访问迭代器
deque
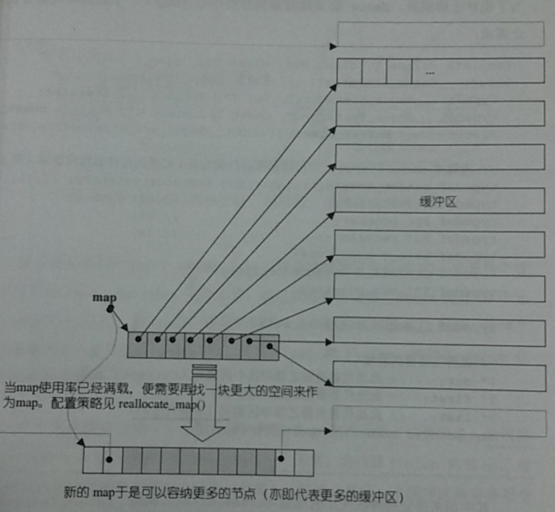
双向开口的连续线性空间,动态的以分段连续空间组合而成,由一段一段的定量连续空间构成
deque有一段中控器,叫map
stack和queue有deque进化而来,这两个没有迭代器
heap
heap扮演priority_queue的助手,priority_queue允许用户以任何次序推入,取出一定是数值最高的元素
push_heap:新加入的元素放在最下一层作为叶节点,上溯
pop_heap:将根节点取出,把最下一层最右元素放在根节点位置,下溯
sort_heap:不断对heap进行pop操作,达到排序效果
priority_queue
权值高者排在前面(权值通常用实值)
平衡二叉树 (AVL树):树的深度为Ologn 通过左旋,右旋,双旋来让树保持平衡
红黑树(RB树):
每个节点不是红就是黑,根节点是黑,红节点的孩子一定是黑,任意节点到叶节点的路径黑节点数必须相同
时间复杂度Ologn
红黑树属于不严格平衡二叉树。说它不严格是因为它不是严格控制左、右子树高度或节点数之差小于等于1。不用严格控制高度,使得插入效率更高。红黑树插入效率比AVL树高,因为rebalance操作O(1)比AVL树O(logn)快(插入都是O(1),删除O(1) vs O(n))
红黑树的查询性能略微逊色于AVL树,因为他比avl树会稍微不平衡最多一层,也就是说红黑树的查询性能只比相同内容的avl树最多多一次比较,但是,红黑树在插入和删除上完爆avl树,avl树每次插入删除会进行大量的平衡度计算,而红黑树为了维持红黑性质所做的红黑变换和旋转的开销,相较于avl树为了维持平衡的开销要小得多
红黑树能够以O(log2 n) 的时间复杂度进行搜索、插入、删除操作。此外,由于它的设计,任何不平衡都会在三次旋转之内解决。
如果插入一个node引起了树的不平衡,AVL和RB-Tree都是最多只需要2次旋转操作,即两者都是O(1);但是在删除node引起树的不平衡时,最坏情况下,AVL需要维护从被删node到root这条路径上所有node的平衡性,因此需要旋转的量级O(logN),而RB-Tree最多只需3次旋转,只需要O(1)的复杂度。
应用红黑树的关联容器:set multiset map multimap
应用哈希的关联容器:hash_set hash_map hash_multiset hash_multimap unordered_map
1、STL的map底层是用红黑树实现的,查找时间复杂度是log(n);
2、STL的hash_map底层是用hash表存储的,查询时间复杂度是O(1);
3、什么时候用map,什么时候用hash_map?
不一定常数级别的hash_map一定比log(n)级别的map要好,hash_map的hash函数以及解决地址冲突等都要耗时间,而且众所周知hash表是以空间换时间的,因而hash_map的内存消耗肯定要大,一般情况下,考虑查找速度用hash_map,考虑内存消耗用map,海量数据一般用map
set
所有元素会根据元素的键值自动排列
map
map所有元素都是pair,同时拥有value和key,pair第一个元素被视为key,第二个是value
hashtable
哈希函数构造方法:
1 直接定址: H(key) = a * key + b
2 除留余数: H(key) = key % p
3 平方取中 ……
STL中
1.对于Int,long,short char,是直接返回原值
__STL_TEMPLATE_NULL struct hash<int> { size_t operator()(int __x) const { return __x; } };
2.对于const char *
inline size_t __stl_hash_string(const char* __s) { unsigned long __h = 0; for ( ; *__s; ++__s) __h = 5*__h + *__s; return size_t(__h); }
处理冲突:
1 线性探测 用下一个可用元素 缺点容易造成大量元素在相邻散列地址上的堆积
2 再散列
3 拉链
hash_map简单实现
选择“除留取余法”作为hash函数,选择“开散列地址链”作为冲入解决算法
struct Node//地址链节点 { int key;//键 int value;//值 Node*next;//链接指针 Node(int k,int v):key(k),value(v),next(NULL){} };
#define SIZE 100 //地址链个数,足够大 class SimHash { Node**map;//地址链数组 size_t hash(int key)//hash函数,除留取余法 { return key%SIZE; } public: SimHash() { map=new Node*[SIZE]; for(size_t i=0;i<SIZE;i++)map[i]=NULL;//初始化数组为空 } ~SimHash() { for(size_t i=0;i<SIZE;i++)//清除所有节点 { Node*p; while(p=map[i]) { map[i]=p->next; delete p; } } delete[] map;//清除数组 } void insert(int key,int value) { Node*f=find(key);//插入前查询 if(f) { f->value=value;//存在键则覆盖 return; } Node*p=map[hash(key)];//确定地址链索引 Node*q=new Node(key,value);//创建节点 while(p&&p->next)p=p->next;//索引到地址链末端 if(p)p->next=q;//添加节点 else map[hash(key)]=q;//地址链的第一个节点 } void remove(int key) { Node*p=map[hash(key)];//确定地址链索引 Node*q=NULL;//前驱指针 while(p) { if(p->key==key)//找到键 { if(q)q->next=p->next;//删除节点 else map[hash(key)]=p->next;//删除地址链的最后一个节点 delete p; break; } q=p; p=p->next; } } Node* find(int key) { Node*p=map[hash(key)];//确定地址链索引 while(p) { if(p->key==key)break;//查询成功 p=p->next; } return p; } };
c++中map与unordered_map的区别
头文件
- map: #include < map >
- unordered_map: #include < unordered_map >
内部实现机理
- map: map内部实现了一个红黑树,该结构具有自动排序的功能,因此map内部的所有元素都是有序的,红黑树的每一个节点都代表着map的一个元素,因此,对于map进行的查找,删除,添加等一系列的操作都相当于是对红黑树进行这样的操作,故红黑树的效率决定了map的效率。
- unordered_map: unordered_map内部实现了一个哈希表,因此其元素的排列顺序是杂乱的,无序的
优缺点以及适用处
- map
- 优点:
- 有序性,这是map结构最大的优点,其元素的有序性在很多应用中都会简化很多的操作
- 红黑树,内部实现一个红黑书使得map的很多操作在lgn的时间复杂度下就可以实现,因此效率非常的高
- 缺点:
- 空间占用率高,因为map内部实现了红黑树,虽然提高了运行效率,但是因为每一个节点都需要额外保存父节点,孩子节点以及红/黑性质,使得每一个节点都占用大量的空间
- 适用处,对于那些有顺序要求的问题,用map会更高效一些
- 优点:
- unordered_map
- 优点:
- 因为内部实现了哈希表,因此其查找速度非常的快
- 缺点:
- 哈希表的建立比较耗费时间
- 适用处,对于查找问题,unordered_map会更加高效一些,因此遇到查找问题,常会考虑一下用unordered_map
- 优点:
容器的区别
容器的分类:
- 序列式容器:vector, list, deque
- 关联式容器: set, multiset, map , multimap
- 无序容器:unordered_set, unordered_multiset, unordered_map, unordered_multimap.
vector和List的区别:
- vector 迭代器中元素的插入可能引起迭代器失效(扩容);list中元素的插入和删除不会引起迭代器失效;
- vector没有提供sort成员函数,可以直接使用std::sort;std::sort要求ramdomAccessIterator,所以不能使用std::sort,但可以使用成员函数 list.sort();
- vector可以在常数时间求得size,list则不行,内部需要通过遍历来求size,因为list提供merge,spice等操作。
list.sort内部使用归并排序,std::sort内部使用introSort,其内部结合了快排、堆排和插入排序。vector和deque区别:
- deque可以在头部进行常数时间的插入和删除,vector不行
- deque没有容量概念,因为其内部是动态地将分段的连续空间组合而成,deque不会出现内存空间重分配的情况,只会在首部或者尾部增加新空间并连接起来。
- vector和deque都提供ramdomAccessIterator
- deque内部不连续,通过迭代器来维护其连续的假象;vector元素内部连续的,迭代器就是元素指针,很方便。
vector、list、deque的适用场景:
- 默认情况使用vector,适用于大多数场景,连续数组,支持随机访问;
- 经常需要在头部或者尾部插入或移除数据,则应该采用deque;
- 经常需要在容器中部进行插入、删除和移动,则应该使用List;
- 元素无序,但提供常数时间的查找,unorderd_set,unorderd_map(内部使用hash结构实现,unordered_map适用于key-value)
- 有序有序,对数时间的查找,set,map(内部使用红黑树实现)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号