A*算法
A*寻路算法
引入
假设你身处一座迷宫,要从起点穿过障碍到达终点,像上图一样,想要快速找到一条最短路径该如何做呢?
DFS?显然太耗时间。BFS?有太多点不必遍历。
所以,我们可以引入A*算法来解决这一问题。
概述
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。 ----摘自 百度百科
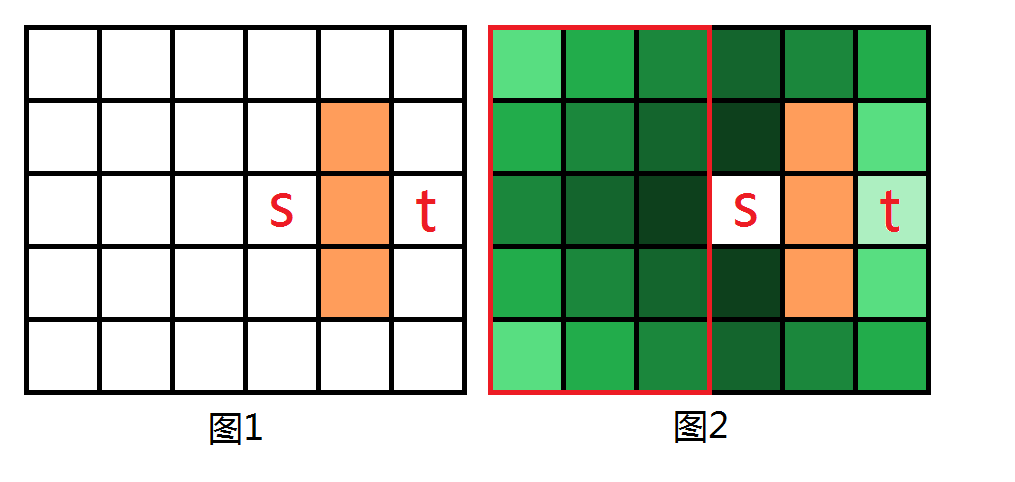
如下图1,若要搜索s到t的最短路径(只能上下左右走),用BFS的话,如图2,会搜索大量的没用格子(如红框框起来的),原因是什么呢?我们发现,是因为BFS会以自身为中心,无条件向四周蔓延。所以,我们想,能否加上若干条件,让BFS总向终点的方向搜呢?
在A* 算法中,f数组维护了“从初始状态经由状态n到目标状态的最小代价估计”,即上述的“条件”,计算方法为:\(f_{i,j}=g_{i,j}+h_{i,j}\)。其中,g数组存的是“在状态空间中从初始状态到状态n的最小代价”,h数组存了“从状态n到目标状态的路径的最小估计代价”。说人话,g存的是从起点到该点的代价,h存的是该点到终点的预计代价,f就是g+h,即综合代价。显然f越小,它在最短路径上的可能性越大,我们就要选择它继续遍历。
于是,我们得到了A* 算法的大致框架:在BFS中插入f数组预估代价,选择合适点进行搜索。
详解
准备阶段
在正式讲解之前,我们先明确f,g,h的计算方法及一些函数及变量。g是起点到该点的代价,我们可以搜索时维护步数;h是该点到终点的代价,我们有以下方式计算:曼哈顿距离、对角距离、欧几里得距离。这里只能上下左右移动,故选择曼哈顿距离来当做代价h;f数组就是g,h两数组相加。
再就是选点的过程,我们每次遍历都选择在队列里的(参照BFS)、f最小的(参照A* )点进行遍历,这就要求我们选的存放点的数据结构能够增减点、维护最值,这里我选了set(其实优先队列priority_queue等也行)。
还有搜索中,我们要存放哪些点遍历过而哪些没有,我选用两个数组open(存在set中的点)和close(遍历过了,不用再管)存放,在下文中分别用绿色和蓝色边框表示。
开始搜索
首先,我们肯定是把起点s放入set,同时设置open[s]=1。取set中f最小的点(此时为s),设置close为1,open为0(相当于把这个点固定了,不再更新,此时其f,g,h值显然是最优的)搜相邻的可走的方格,更新它们的f,g,h值,并把它们加入队列set中。之后依次取f最小的点重复上述过程直到到了终点即可。
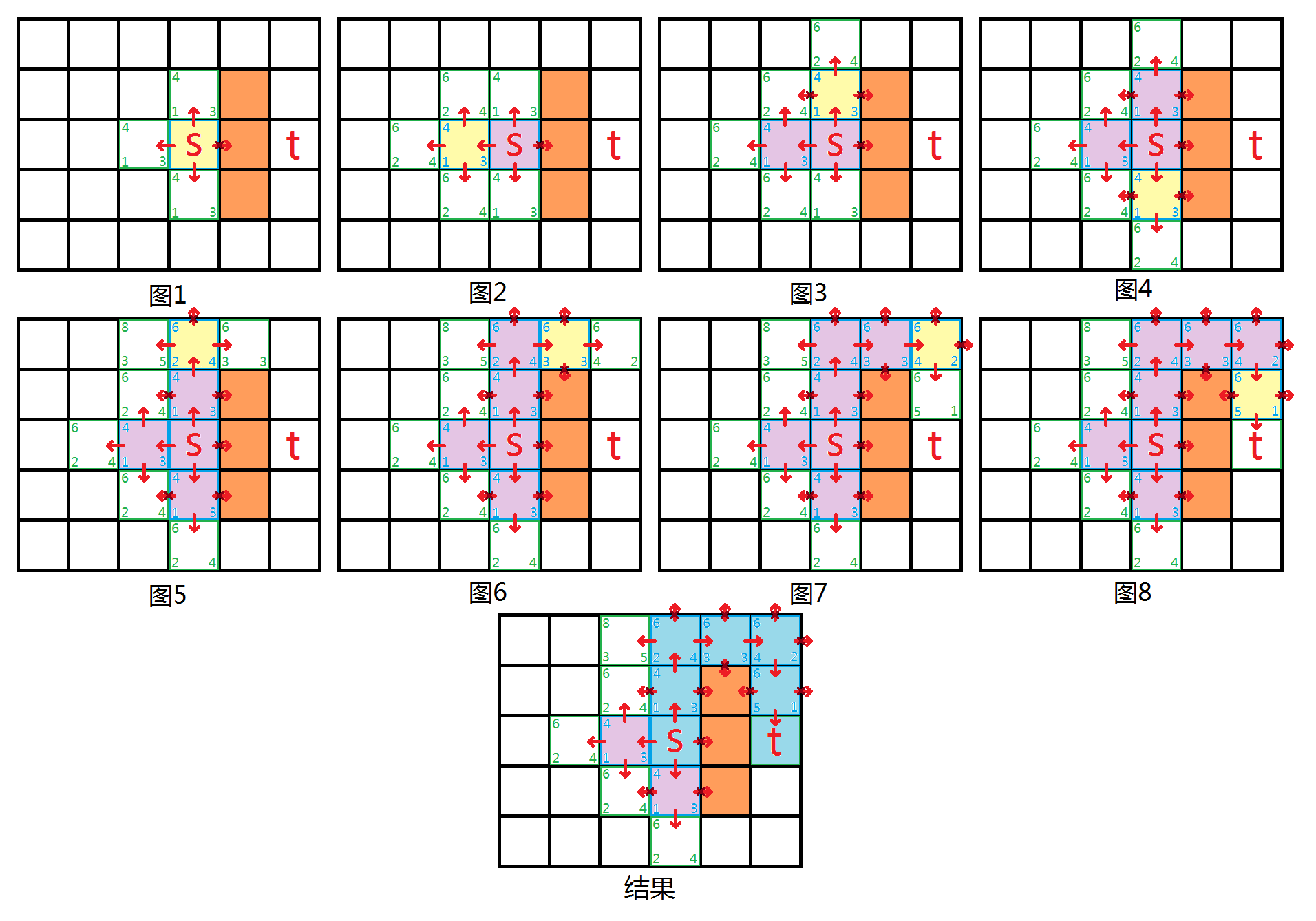
如图,底色橙色的是障碍物。绿色边框的是open中的点,蓝色的是close中的点。close中,底色淡紫色的是搜过的点,淡黄色的是在搜的点。每个点左下方的是g,右下方的是h,左上方的是f。底色淡蓝色的是最终的路径。
让我们模拟亿下。如图1,首先,拿出open中f最小的点,此时为起点s,将其设为close,并从s开始向四周搜,并将四周加入open中,更新f,g,h值。然后,从open中拿出f纸最小的点,这里s左边、上面、下面的点都满足要求,图2,3,4依次搜了这些点周围的点。之后,open中f最小为6,如图5,f一样时我们一般选最后加进来的点搜,于是依次有了图5,6,7,8,图8中到了终点。
回溯路径
图8中成功到了终点(即终点t进入了open),这时,我们如何输出路径呢?只要从终点开始沿来时的箭头一路退回去就好了。为了在程序中直接输出路径,我们可以从终点开始搜起点(我是这么做的),最后沿箭头从起点回溯到终点的路径就是从起点到终点的最短路径。
总结
所以,A* 算法的主要流程就是:
- 将起点s加入open
- 重复以下过程:
- 找出open中f最小的点,将其从open转移至close中
- 遍历其四周的方格,若能更新就更新
- 直到open空了或者终点t进入了open就结束
- 回溯输出路径
代码
#include<iostream>
#include<cstdio>
#include<set>
#define maxn 105
using namespace std;
int n,s1,t1,s2,t2;
int a[maxn][maxn];
int dx[5]={1,-1,0,0},dy[5]={0,0,1,-1};
bool open[maxn][maxn],close[maxn][maxn];
struct node{
int f,g,h,x,y,fax,fay;
//f,g,h含义如文中所述;x,y是该点坐标;fax,fay是父节点坐标
bool operator<(const node& xx) const {return f<xx.f;}//重载>和<
bool operator>(const node& xx) const {return f>xx.f;}
// bool operator==(const node& xx) const{
// return (f==xx.f&&g==xx.g&&h==xx.h&&x==xx.x&&y==xx.y&&fax==xx.fax&&fay==xx.fay);
// }
// bool operator!=(const node& xx) const{
// return !(f==xx.f&&g==xx.g&&h==xx.h&&x==xx.x&&y==xx.y&&fax==xx.fax&&fay==xx.fay);
// }
}s[maxn][maxn];
multiset<node> openlist;//队列
int abs(int x) {return x<0?-x:x;}
int dis(int px1,int py1,int px2,int py2) {return abs(px1-px2)+abs(py1-py2);}//曼哈顿距离预估到终点的价值
void astar(){
s[s1][t1]=(node){dis(s1,t1,s2,t2),0,dis(s1,t1,s2,t2),s1,t1,-1,-1};//把起点加入队列
open[s1][t1]=1;openlist.insert(s[s1][t1]);
while(openlist.size()!=0&&!open[s2][t2]){//重复直到搜到终点或把能搜的点都搜完了
int topx=(*openlist.begin()).x,topy=(*openlist.begin()).y;openlist.erase(openlist.begin());
//取队首点的坐标
open[topx][topy]=0;close[topx][topy]=1;//从open转移到close中
for(int i=0;i<4;i++){//遍历四周的点
int newx=topx+dx[i],newy=topy+dy[i];
if(a[newx][newy]==1||close[newx][newy]==1||newx<=0||newx>n||newy<=0||newy>n) continue;
//不符合条件(是障碍物或搜过了或超范围)
if(!open[newx][newy]){//若没搜过则加入队中
open[newx][newy]=1;
s[newx][newy]=(node){0,s[topx][topy].g+1,dis(newx,newy,s2,t2),newx,newy,topx,topy};
s[newx][newy].f=s[newx][newy].g+s[newx][newy].h;
openlist.insert(s[newx][newy]);
}else{
if(s[topx][topy].g+1<s[newx][newy].g){//搜过但路径更优也更新
openlist.erase(s[newx][newy]);
s[newx][newy]=(node){0,s[topx][topy].g+1,dis(newx,newy,s2,t2),newx,newy,topx,topy};
s[newx][newy].f=s[newx][newy].g+s[newx][newy].h;
openlist.insert(s[newx][newy]);
}
}
}
}
if(s[s2][t2].g>0){//若终点搜过了
int fx=s2,fy=t2,fxx=s2;
printf("%d\nThe Path is: ",s[s2][t2].g);
while(s[fx][fy].fax!=-1){//向前回溯输出路径
printf("(%d,%d)->",s[fx][fy].x,s[fx][fy].y);
fxx=fx;fx=s[fx][fy].fax;fy=s[fxx][fy].fay;
}
printf("(%d,%d)-->End.",s[fx][fy].x,s[fx][fy].y);
}else printf("-1");//终点没被搜则无解
}
int main(){
scanf("%d",&n);scanf("%d%d%d%d",&s1,&t1,&s2,&t2);//(s1,t1)是起点,(s2,t2)是终点
swap(s1,s2);swap(t1,t2);//互换起点和终点以便输出路径
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)
scanf("%d",&a[i][j]);
astar();//计算
return 0;
}
/*
01网格图,从(s1,t1)到(s2,t2),1为障碍,只能上下左右走,输出最短路径.
*/
/*
6 6 1 6 5
0 0 0 1 0 0
0 1 0 0 0 0
0 1 0 1 0 1
0 1 0 1 0 0
0 1 0 0 1 0
0 1 0 1 0 0
10 8 3 2 8
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 1 1 1 0 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 1 1 1 0 0 0 0
*/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号