PCR论文学习
论文《Progressive Correspondence Regenerator for Robust 3D Registration》
背景
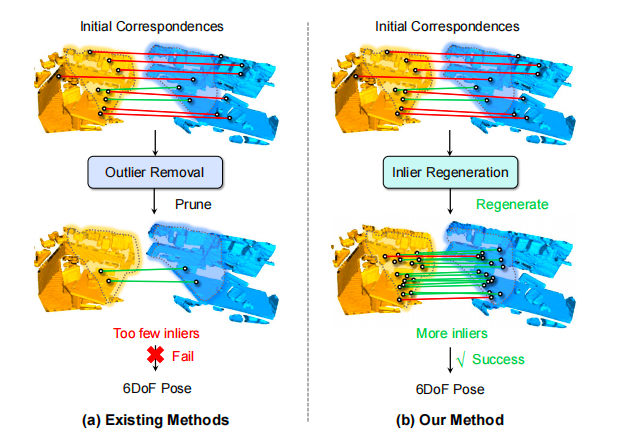
如图所示,以往的工作在进行离群值和内点区分的时候,对于离群值,直接进行修剪,只保留对应正确的内点,而本论文则不同,对于离群值,我们以它作为基础,进行新一轮的内点生成,并继续迭代,直至内点数满足要求。
具体工作
整体架构
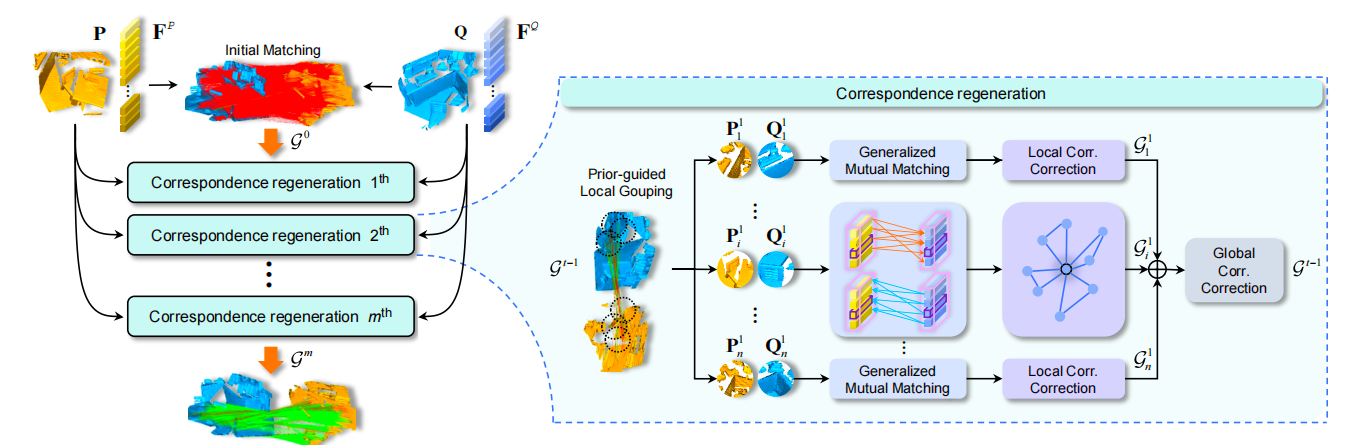
整体架构图如上,P是源点云,Q是目标点云,分别对P和Q提取特征后得到Fp、Fq,接下来我们进行初匹配,在第一次匹配之后,得到最初的对应关系g0,我们以g0为开始进行迭代,每次都以gt-1为输入,进行对应关系重建(Correspondence regeneration),在对应关系重建中,主要的操作是从gt-1的对应关系中,采用一部分作为种子对应,以种子为中心画圆得到局部区域,形成Pi和Qi,接着每一个局部区域都进行广义互匹配得到新的对应关系,然后使用三元组一致性对对于关系进行再次细化,最终进行合并操作得到全局的对应关系,通过SVD方法得到精确的旋转矩阵R和平移变量t
本地分组和重新匹配
首先我们来看上文中所说的,在进行初匹配之后,我们是通过种子进行画圆得到的各个局部区域,在这里是如何进行具体实现的。
我们以前一阶段的对应关系gt-1为输入,在这里使用了随机采样的方式进行采样,以此来得到种子,然后对每个种子,我们以当前种子为中心点,设立半径r,进行半径为r的最近邻搜索,以此获得局部点云Pi和Qi,每个都是如此,对应公式如下

i的值从1遍历到n,这样我们就得到了n组的局部对应关系(Pi,Qi)。
接下来就是重新匹配模块,即广义互匹配模块。
传统的最近邻,也就是NN匹配会使得我们找到的对应关系过多,这中间会产生大量离群值,即错误匹配的对应点,但是如果采用互最近邻匹配,就会使得满足要求的对应关系很少,我们的广义互匹配模块则是取了一个中间态,它既使用了NN,也使用了MNN进行规范对应点,具体如下
在这里,我们给定点云Q作为查询,对其执行k最近邻搜索可获得最近邻匹配矩阵M1(p->q)和互最近邻矩阵M2(p->q)

若满足条件则将值设为1,这是P->Q的,同理我们可以得到M1(q->p)和M2(q->p),这个时候我们就有了四个矩阵。
接下来我们通过计算NN和MNN的哈达玛乘积,就可以得到相互匹配矩阵M*(p->q)和M*(q->p),我们在这里进行或操作,以此来放宽条件,获得广义互匹配矩阵

通过M*,我们获得了n组局部对应关系gi_t
局部对应关系优化
在重新匹配过后,由于部分原因,比如遮挡、初始对应关系不准确等,可能仍会引入部分错误对应关系。因此,我们进一步通过局部对应关系优化来提升对应关系的质量,这里使用的是中心感知三点一致性的方法,具体如下:
我们使用的是来自前一阶段的种子对应点gt-1,我们任选两个点对gi=(pi,qi)和gj=(pj,qj),然后计算两者之间的一致性,如果两者都是正确的,那么pi和pj的距离,应该与qi和qj的距离是几乎一致的

但有时可能存在情况是种子对应点并非是正确的,仅依靠此可能引发一系列的错误,比如pi和qi这个对应关系错误,那么即使pj和qj对应正确,计算这个距离时仍是不满足要求的,所以这里我们就需要进行再次优化,因此这里提出了双路径检测

第一个是中心点传递一致性,如果gi和gi_t-1与gi_t-1和gk都满足,那么证明gi和gk是正确的对应点,第二个则是将阈值限制的更加严格,若满足则也能说明是正确的,两者存在一个正确的即可。
接下来我们定义了一个综合评分函数,我们设定阈值,计算S的L1范式,具体公式如下
如果满足要求则视为正确的对应区域。
我们对每个点对都进行这样的操作,就可以找出全部的正确对应区域。
局部对应修正
在获取了全部的正确对应关系之后,我们挑选出得分最高的一部分,通过这部分计算出对应的局部变化矩阵R和平移向量t

然后以此来修正所有点对,具体操作是,我们对p进行变换,然后在目前点云中寻找最近点q',以此来得到新的q,公式如下

全局对应关系优化
在上个模块之后,我们得到了n组优化后的局部对应关系,但是不同关系之间可能存在重叠等情况,所以我们这里需要进行处理。
这里使用的合并方式是通过哈希表进行合并,举个例子
区域1:{(p1,q1), (p2,q2), (p3,q3)}
区域2:{(p2,q2), (p4,q4), (p5,q5)} ← 重叠p2,q2
区域3:{(p3,q3), (p5,q5), (p6,q6)} ← 重叠p3,q3, p5,q5
使用哈希表进行合并后为{(p1,q1), (p2,q2), (p3,q3), (p4,q4), (p5,q5), (p6,q6)}
合并之后,我们仍然需要进行一次优化,之前的都是局部一致性,这里我们是对全局进行一致性的检验,采用的方法是二阶一致性方法,前文中的中心感知一致性就是基于一阶一致性,它只考虑了距离,那么什么是二阶一致性呢,在考虑距离的基础上,加上了对角度的检验,也就是说,不仅要保持距离的一致,同时要保持角度的一致。然后寻找最大一致子集,估计出全局变换R和t,修正所有点对,以此来得到更好的对应关系。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号