
STM32中断、NVIC、EXTI
一、如何提高程序的实时性
轮询式系统
指的是在程序运行时,首先对所有的硬件进行初始化,然后在主程序中写一个死循环,需要运行的功能按照顺序进行执行,轮询系统是一种简单可靠的方式,一般适用于在只需要按照顺序执行的并且没有外部事件的影响的情况下。程序的运行过程中出现如按键等需要外部检测的事件,轮询系统的实时响应能力变得很差。
int main()
{
//1. 对所有的硬件进行初始化(LED、BEEP、KEY......)
//2.进入死循环
while(1)
{
//点灯
//警报
//按键
}
}
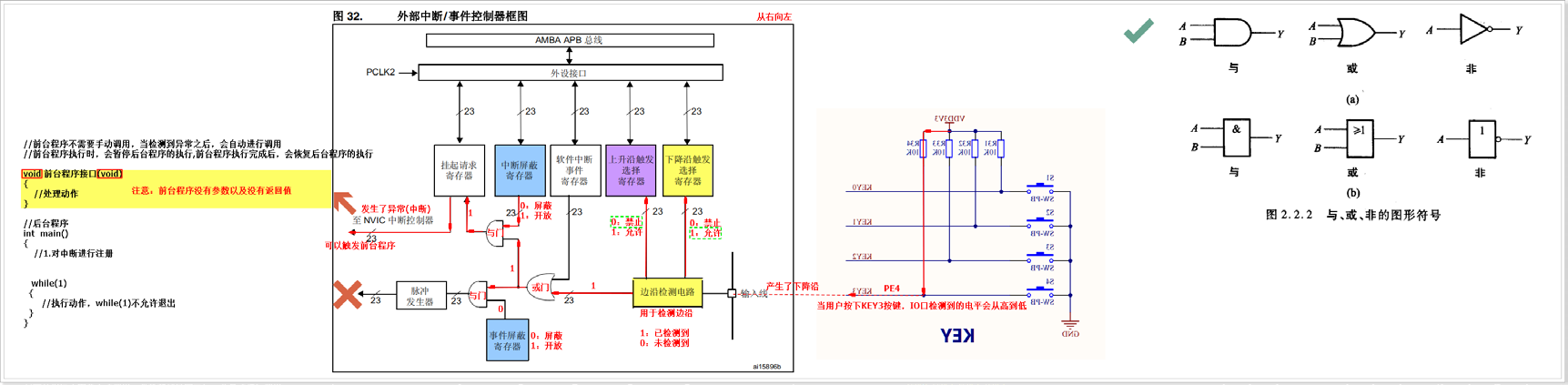
前后台系统
相比于轮询系统,前后台系统增加中断的概念,如果外部事件发生,则在中断中进行处理,主程序在轮询系统中运行,中断被称为前台,主程序中的while(1)就称为后台。中断会终止后台程序的运行,然后跳转到对应的中断服务函数中去处理,处理完成后,在继续执行后台
的程序。
//不需要手动调用,当进程捕获到SIGINT 信号时,系统会暂停主程序的执行,来执行该函数
void signal_handler(int signum)
{
//处理动作
}
int main()
{
//1.对中断进行注册
signal(SIGINT,signal_handler);
while(1)
{
//执行动作,while(1)不允许退出
}
}
如果使用前后台系统,可以极大程度的提高程序的实时响应能力,避免造成外部事件的缺失。
多任务系统
相比于前后台系统,多任务系统的外部事件也是在中断中进行响应,但是外部事件的处理是任务中进行处理。任务具有优先级,优先级高的任务先处理,所以程序就会被分割为一个个的任务,任务是一个独立的死循环,并且不能返回,可以由操作系统进行任务的调度,程序段的实时响应能力又得到提升。
//任务1
void * task1(void *arg)
{
while(1)
{
}
}
//任务2
void * task2(void *arg)
{
while(1)
{
}
}
int main()
{
//1.对所有的硬件进行初始化
//2.创建任务,并设置任务的属性(优先级、内存分配、时间片)
//3.交给系统的调度器去执行
}
二、外部中断的概述
1.中断的概念
中断指的是CPU 来处理和响应外部发生的异常,中断也就意味着打断,比如打断正在做的事,然后去处理一个紧急的事,处理完成后在继续做刚才没做完的事。比如打游戏,女朋友来电话。注意:中断是允许嵌套的!
2. 中断源分析
中断源指的是中断发生的源头,中断源在内核中已经定义好了,中断源也称为向量表,向量表在STM32F4 中文参考手册参考。
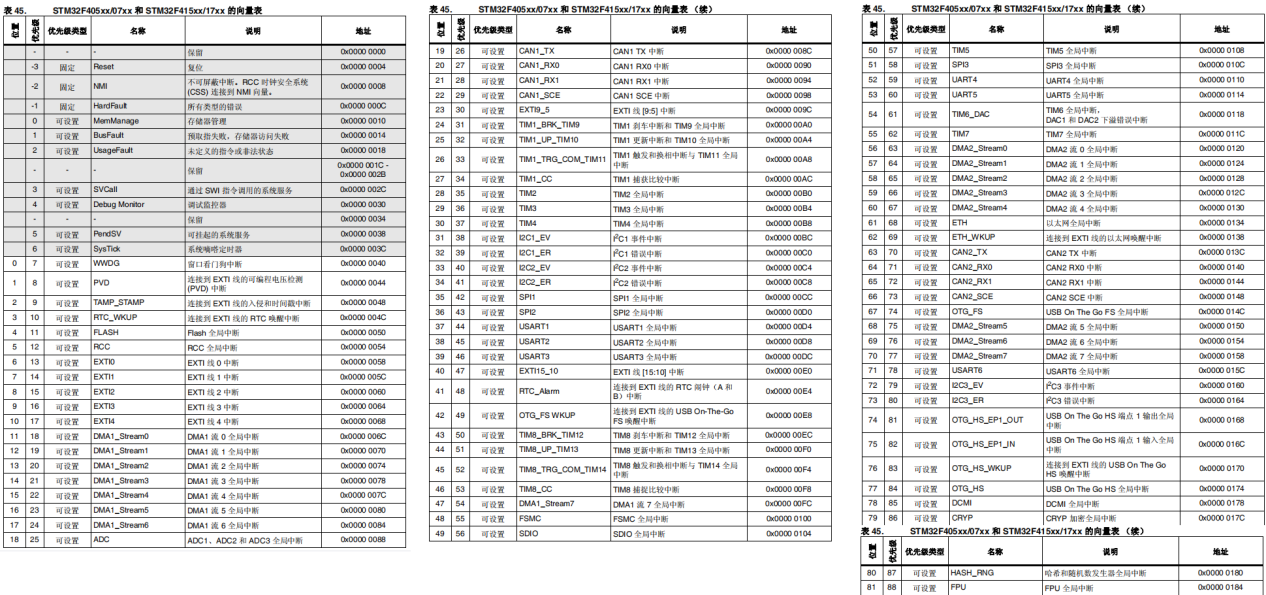
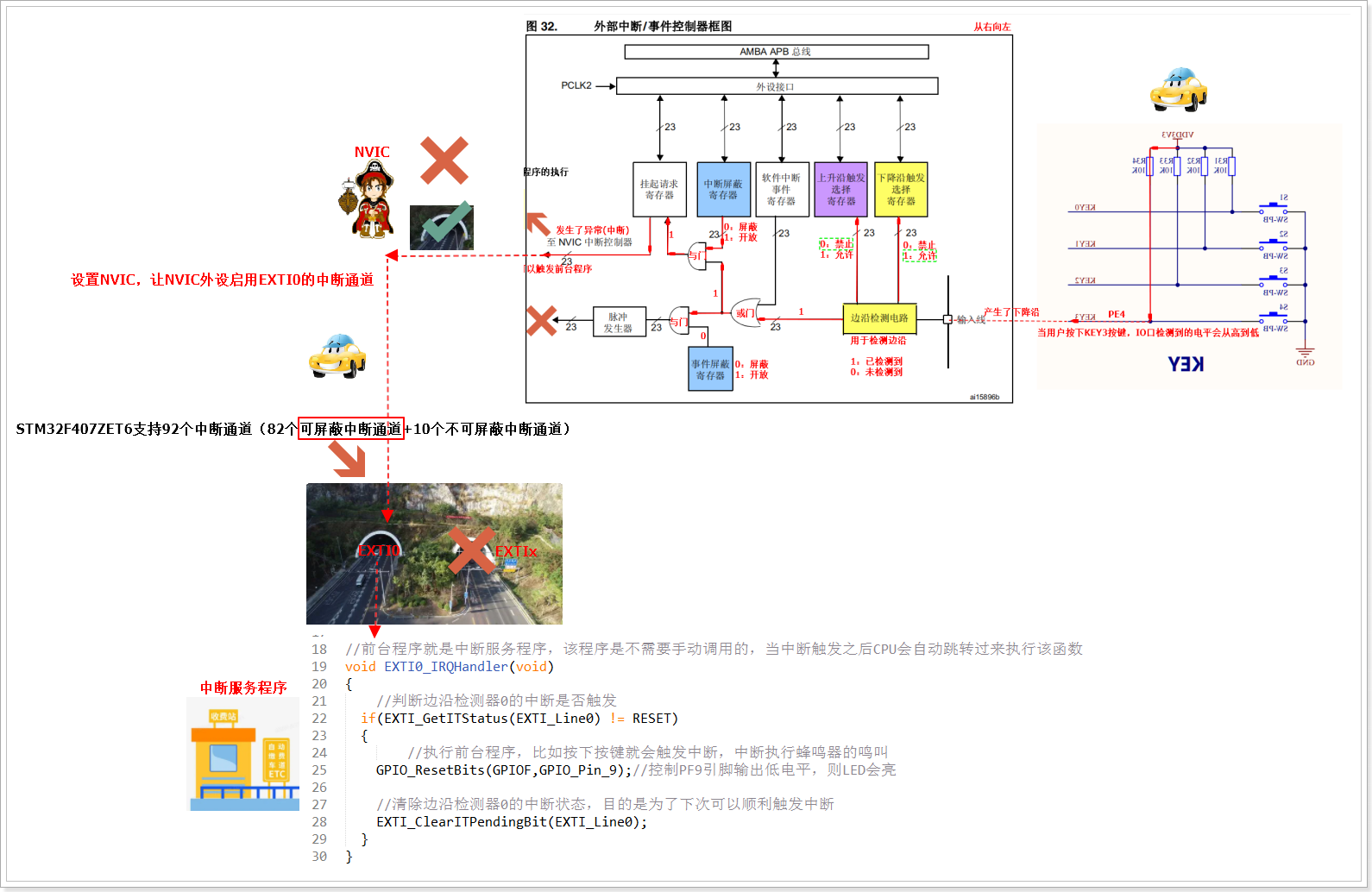
Cortex-M4 内核一共支持256 个中断,其中有16 个内核中断,240 个外部中断,只不过对于STM32F407 系列来说,只用到了一部分,包含了10 个内核中断(不可屏蔽中断,无法通过软件进行控制)、82 个外部中断(可屏蔽中断,可以通过软件进行控制)
3.NVIC 的概述
NVIC 指的是嵌套向量中断控制器,属于内核中的外设,作用是管理所有的中断,比如中断的使能或失能、中断的优先级.....。
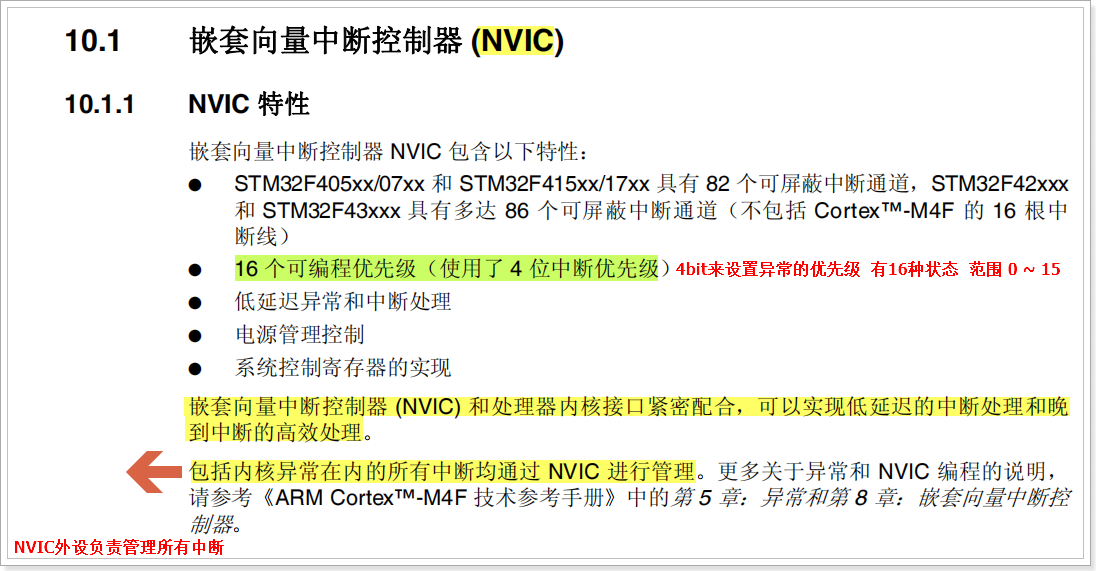
不管是Cortex A 系列还是Cortex M 系列的内核内部均有NVIC,通过NVIC 来管理内核异常和外部异常。
中断的使能与失能
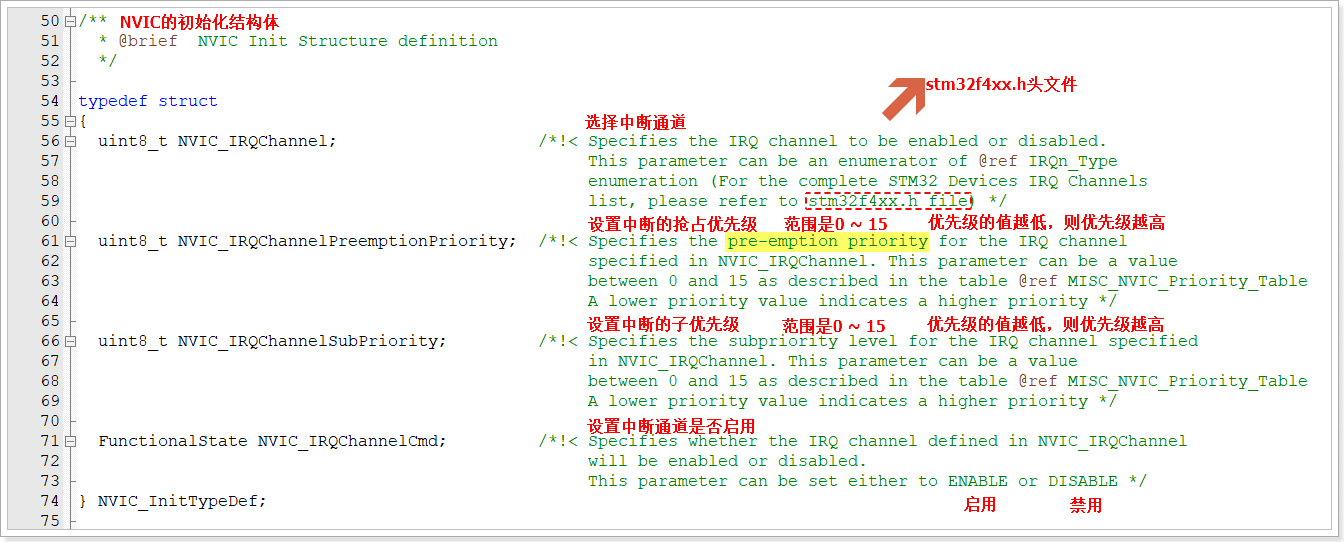
NVIC 管理中断通道的打开与关闭,可以把NVIC 理解为所有中断的开关,想要使用中断发送中断请求,就必须提前打开中断的通道。关于NVIC 的使用都存储在一个结构体中,这个结构体和NVIC 的函数接口都定义在misc.c 和misc.h 中。
中断的优先级设置
NVIC 利用4bit 的优先级来管理所有的中断通道,STM32 中断的优先级分为两种:抢占式优先级(主优先级) + 响应式优先级(子优先级),每种都有16 个优先级(0~15),数字越小,优先级越高。
意义:如果同时发生多个中断请求,但是又不能同时处理,就根据中断请求的优先级来处理和响应中断。
抢占优先级(主优先级):抢占优先级高的中断可以打断正在执行的抢占优先级低的中断!!!
响应优先级(子优先级):在同时发生多个中断的情况下,响应优先级高的中断可先执行!!!
(1) 抢占优先级高的中断可以打断正在执行的抢占优先级低的中断
(2) 抢占优先级相同的中断同时发生,响应优先级高的中断先执行
(3) 抢占优先级相同的多个中断发生,响应优先级高的中断不能打算响应优先级低的中断
(4) 抢占优先级和响应优先级相同的多个中断同时发生,则按照向量表的中断编号来执行

为了方便用户管理和响应中断,NVIC 可以对中断优先级进行分组,这样用户可以方便配置
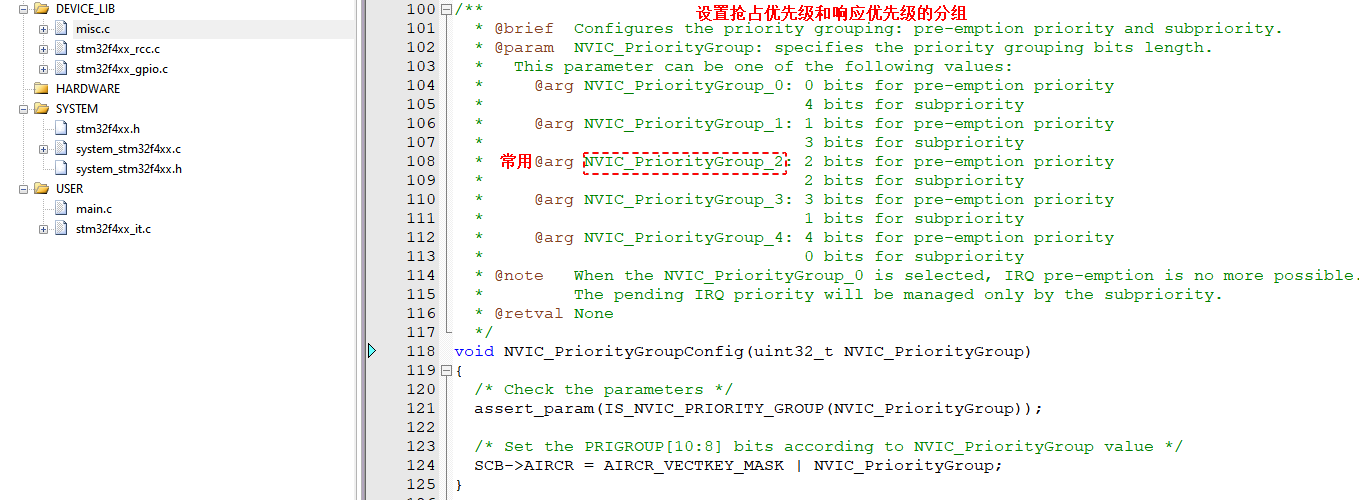
注意:该函数必须在主程序的入口进行调用,并且整个项目应该只调用一次,因为设置好优先级分组之后就不应该随意更改分组,否则中断管理比较混乱。
三、EXTI 外设的基本原理与应用
基本概念
EXTI 指的是外部中断/事件控制器,一共有23 个,每个都有一个内部的边沿检测器,可以检测上升沿或者下降沿,每根线都可以产生事件或者中断。
注意:每个GPIO 引脚都可以配置为外部中断,但是和GPIO 相关的外部中断线一共有16 根,分别为EXTI0~EXTI15。
基本原理
思考:STM32F407 系列有114 个GPIO 口,那如何和外部中断线进行关联?通过映射的方式
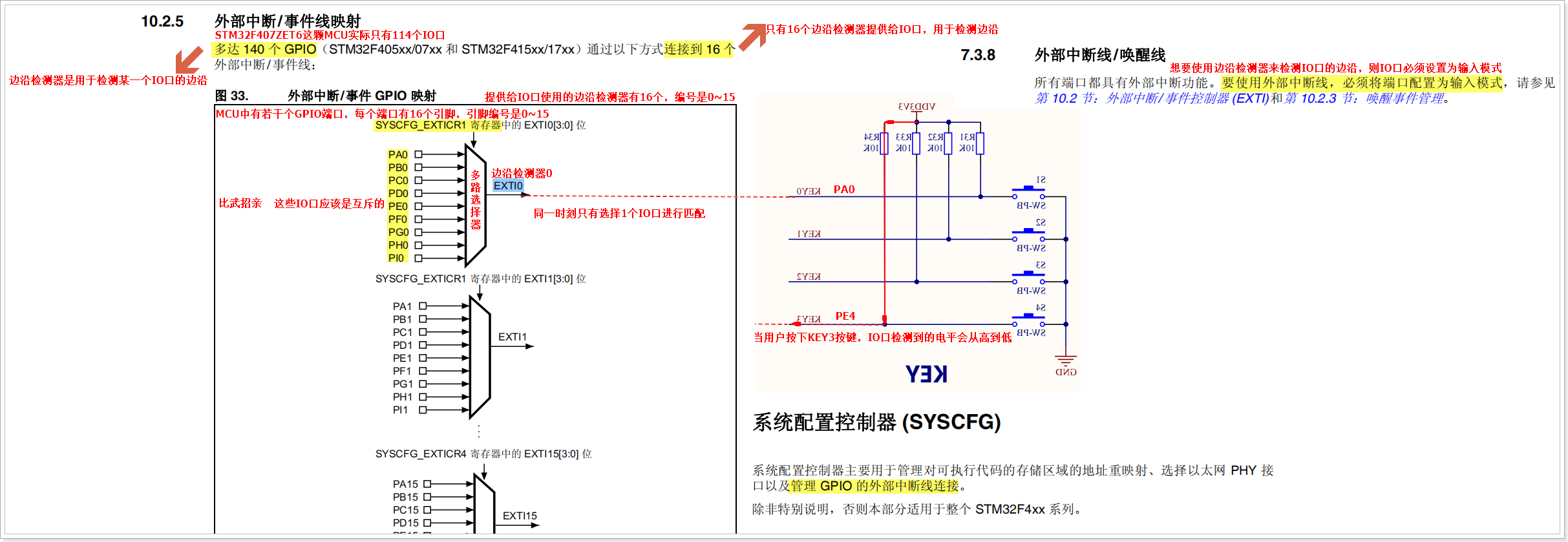
注意:STM32F407 所有IO 口都可以设置为外部中断,但是必须把GPIO 引脚配置为输入模式。
四.程序设计
/**
******************************************************************************
* @file main.c
* @author qrshxc@163.com
* @version V1.0
* @date 2025.7.23
* @brief 实现MCU的按键控制开发板的蜂鸣器和LED灯
******************************************************************************
**/
#include "stm32f4xx.h"
/**
* @name delay
* @brief 简单的延时函数
* @param n: 延时计数值,值越大延时越长
* @return 无
* @version 1.0
* @note 使用空循环实现延时,精度不高
*/
void delay(u32 n)
{
while(n--);
}
/**
* @name EXTI0_IRQHandler
* @brief 外部中断0中断服务函数
* @param 无
* @return 无
* @version 1.0
* @note 当PA0引脚检测到上升沿时触发此中断
*/
void EXTI0_IRQHandler(void)
{
/* 判断边沿检测器是否触发*/
if(EXTI_GetITStatus(EXTI_Line0) != RESET)
{
/* LED灯状态翻转 */
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
/* 蜂鸣器响 */
GPIO_SetBits(GPIOF, GPIO_Pin_8);
/* 延时一段时间 */
delay(5000000);
/* 清除EXTI line 0中断标志,为下次触发做准备 */
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
/**
* @name Beep_Config
* @brief 蜂鸣器初始化配置
* @param 无
* @return 无
* @version 1.0
* @note 配置PF8引脚为推挽输出模式,用于控制蜂鸣器
*/
void Beep_Config()
{
/* 定义GPIO外设的结构体变量 */
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能GPIOF端口的时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
/* 对PF8引脚进行配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; // 蜂鸣器控制引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 高速模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; // 无上下拉
GPIO_Init(GPIOF, &GPIO_InitStructure);
/* 蜂鸣器默认不响 */
GPIO_ResetBits(GPIOF, GPIO_Pin_8);
}
/**
* @name Led1_Config
* @brief LED灯初始化配置
* @param 无
* @return 无
* @version 1.0
* @note 配置PF9引脚为推挽输出模式,用于控制LED灯
*/
void Led1_Config()
{
/* 定义GPIO外设的结构体变量 */
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能GPIOF端口的时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
/* 对PF9引脚进行配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // LED控制引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; // 输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 高速模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; // 无上下拉
GPIO_Init(GPIOF, &GPIO_InitStructure);
/* LED灯默认熄灭 */
GPIO_SetBits(GPIOF, GPIO_Pin_9);
}
/**
* @name Key1_Config
* @brief 按键1初始化配置
* @param 无
* @return 无
* @version 1.0
* @note 配置PA0引脚为外部中断输入,上升沿触发
*/
void Key1_Config()
{
/* 定义外设的结构体变量 */
EXTI_InitTypeDef EXTI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* 启用GPIOA的时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
/* 启用SYSCFG时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
/* 配置PA0引脚为输入模式 */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; // 输入模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; // 无上下拉
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; // 按键引脚PA0
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* EXTI Line0 和 PA0 建立映射关系 */
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
/* 配置EXTI Line0外部中断线 */
EXTI_InitStructure.EXTI_Line = EXTI_Line0; // 边沿检测器编号,需要与引脚编号保持一致
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // 中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; // 上升沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; // 使能外部中断线
EXTI_Init(&EXTI_InitStructure);
/* 配置NVIC中断控制器 */
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; // 外部中断0通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x0F; // 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x0F; // 子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断通道
NVIC_Init(&NVIC_InitStructure);
}
/**
* @name main
* @brief 主函数
* @param 无
* @version 1.0
* @note 程序入口,初始化各外设后进入主循环
*/
int main()
{
/* 按键初始化 */
Key1_Config();
/* LED灯初始化 */
Led1_Config();
/* 蜂鸣器初始化 */
Beep_Config();
/* 主循环 */
while(1)
{
/* 确保蜂鸣器不响(中断中会控制蜂鸣器响) */
GPIO_ResetBits(GPIOF, GPIO_Pin_8);
}
return 0;
}
注意:中断服务函数是不需要用户手动调用的,在满足中断触发条件(比如设置的下降沿触发),此时如果EXIT 捕获到一个下降沿,则会自动跳转到中断服务函数的地址下,然后去执行中断服务函数的内容。
注意:中断意味着程序出现异常,需要用户快速的解决异常,所以要求中断服务函数要精简,要高效,所以用户不应该在中断服务函数中调用太长的延时函数,也不应该处理比较复杂的功能,如果要处理比较复杂的代码,可以在中断服务函数中设置标志位,然后在后台判标志位并执行对应的代码段。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号