时空复杂度再入门
 再谈
再谈
规定
渐近记号
我们往往希望通过某些东西来度量我们消耗资源的多少,在算法竞赛中,一般为空间和时间。
我们希望知道对于某个 \(\boldsymbol{问题}\) ,我们的算法所消耗的资源随着 \(\boldsymbol{实例}\) 规模的变化将如何变化。
我们认为,我们的算法是可界定的,即运行时间是可以通过输入规模(比如说数组长度 \(n\))的一个函数 \(f(n)\) 来大概描述的。
举个插入排序的例子,对于一个大小为 \(n\) 的实例,\(f(n)=an^2+bn+c\) ,其中 \(a,b,c\) 是非负常实数。
在 \(n\) 足够大时,低次项以及高次项常数带来的影响往往可以忽略。
所以我们可以称插入排序的复杂度为 \(\Theta(n^2)\) 。
发现我们其实是在描述运行时间随着输入规模增长而增长的速度。
下面我们给出三种渐进符号的形式化定义。
渐近紧确界 \(\Theta\)
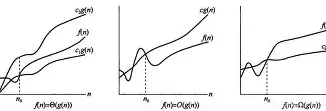
记 \(g(n)\in \Theta(f(n))\) ,当且仅当 \(\exist\) 非负常数 \(c_1, c_2:\) \(\exist\) \(n_0>0\) ,\(\forall\) \(n>n_0\) , \(0< c_1f(n)\le g(n)\le c_2f(n)\) 。
渐近上界 \(\Omicron\)
记 \(g(n)\in \Omicron(f(n))\) ,当且仅当 \(\exist\) 非负常数 \(c:\) \(\exist\) \(n_0>0\) ,\(\forall\) \(n>n_0\) , \(0<g(n)\le cf(n)\) 。
渐进下界 \(\Omega\)
记 \(g(n)\in \Omega(f(n))\) ,当且仅当 \(\exist\) 非负常数 \(c:\) \(\exist\) \(n_0>0\) ,\(\forall\) \(n>n_0\) , \(0< cf(n)\le g(n)\) 。
放一张图来辅助理解。
但是形式化的定义太过繁琐,我们一般非形式化地直接称某部分消耗资源是 \(\Theta(f(n))\) 的。
所以 \(\Theta (n^2)\) 就意味着运行时间随着输入规模增加呈平方量级的增长。
我们一般只关心其效率,更具体的,关心其最差情况下的运行时间。
所以上界 \(O\) 记号是最常用的。
同时,有时影响效率的不可忽略的不只一个变量,同时可能并非是关于变量的一个多项式函数。
所以我们可以见到诸如 \(O(q\sqrt n)\) , \(O(n\log^2 n)\) , \(O(n^33^n)\) 的式子。
当运行时间与输入规模无关时,复杂度是 \(\Theta(1)\) 的。
小结,你需要知道 \(O(f({n}))\) 是某项资源的增长量级上界即可。
(我当年怎么没人给我讲严谨的内容)
(不过讲了也没什么用就是了)
时间复杂度分析的常用方法
数循环层数
for (int i = 1; i <= n; ++i)
for (int j = 1; j < n; ++j)
if (a[j] > a[j + 1]) std::swap(a[j], a[j + 1]);
复杂度 \(O(n^2)\) 。
调和级数
for (int i = 1; i <= n; ++i)
for (int j = 1; j <= n; j += i)
//solve…
复杂度相当于 \(n + \frac{n}{2} + \frac{n}{3} + \cdots + 1 \approx n\ln n = O(n\log n)\) 。
主定理
以归并排序为例,每次将当前问题分治为两个规模更小的子问题,然后用 \(\Theta(n)\) 的复杂度合并。
可以写出递推式,设 \(T(n)\) 为将长度为 \(n\) 的序列排好序所需的时间。
复杂度为 \(O(n\log n)\) 。
摊还分析(势能分析法)
以下文字摘自 oi-wiki:
势能分析(Potential Method)通过定义一个势能函数(通常表示为 \(\Phi\)),度量数据结构的 潜在能量,即系统状态中的预留资源,这些资源可以用来支付未来的高成本操作。势能的变化用于平衡操作序列的总成本,从而确保整个算法的均摊成本在合理范围内。
以 set 维护区间推平为例。
我们需要维护的操作如下:
- 修改端点处的两个颜色段
- 删除之间的所有颜色段
- 插入一个新的颜色段
我们认为 \(n, q\) 同阶,则复杂度为 \(O(n\log n)\) 。
需要严谨证明的是第二个删除操作,单次删除最多可达 \(O(n)\) ,但这样的复杂度为什么不是 \(O(n^2)\) 呢?
我们定义势函数 \(\Phi\) 为 \(set\) 的元素个数,即颜色段个数。
每次修改操作最多会使 \(\Phi\) 增加 \(\Theta(1)\) ,而 \(\Phi\) 初始值为 \(O(n)\) 。
每次删除操作会使 \(\Phi\) 减少 \(1\) ,因为 \(\Phi\) 始终非负,所以删除操作最多进行 \(O(n)\) 次。
所以复杂度为 \(O(n\log n)\) 。
空间复杂度的相关知识
数据单位
bit 位:最小单元,只有 \(0,1\) 两种状态。
byte 字节: \(8\) bit
KB 千字节: \(2^{10}\) byte
MB 兆字节: \(2^{10}\) KB
GB 吉字节: \(2^{10}\) MB
一个 int 一般占四个字节, long long 占八个字节。
其他类型请 BFS(bing first search) 。
堆栈空间
栈空间:函数调用即局部变量所使用的空间。
堆空间:静态变量以及动态分配内存所用的空间。
int a;//堆空间
int main() {
int b;//栈空间
}
栈空间由系统自动分配,堆空间一般通过 new delete 关键字手动管理(一般不用)。
栈空间一般并不大,当申请内存大于剩余内存时会 RE ,即 \(\boldsymbol{爆栈}\) 。
老师可能会让你将数组定义在 main 函数外,这样能定义更多,就是这个原理。
题目的栈空间大小一般与空间限制相同,但本地是系统自动分配的,可能提交可过但本地 RE 。
下面提供本地手动加大栈空间的编译命令。
-Wl,--stack=1280000000
技巧
算好时空复杂度。
提供一份更好的代码模板来尽可能减少因为失误导致的 TLE MLE 。
#include <bits/stdc++.h>
using namespace std;
bool FIRPOS;
//定义所需变量及数组
bool ENDPOS;
int main() {
int c1 = clock();
//solve…
#ifdef DEBUG
cerr << clock() - c1 << " ms " << fabs(&ENDPOS - &FIRPOS) / 1024 / 1024 << " MB\n";
return 0;
#endif
}
编译命令加上 -DDEBUG 。
无法测试由 vector queue 等带来的内存占用,但是可以测试其初始化指针的大小。
其他技巧
1000 ms内大概能处理 \(5\times 10^8\) 次运算,可以将 \(n\) 的上界代入复杂度大概估算。
如 \(O(n\log^2 n)\) 大概可以接受 \(n=10^6\) 的输入。
还有很多细节,如 常数,是否跑的满 等等。
在后续的学习中自己感觉吧。
时间仓促,如有错误欢迎指出,欢迎在评论区讨论,如对您有帮助还请点个推荐、关注支持一下

 浙公网安备 33010602011771号
浙公网安备 33010602011771号