


wcs智能仓储控制系统设计和未来
WCS智能仓储控制系统介绍
1. 引言
随着智能制造与物流自动化的发展,仓储控制系统(Warehouse Control System, WCS)作为连接仓储管理系统(WMS)与底层物流设备的核心枢纽,其智能化水平直接影响仓储运营效率。在全球供应链数字化转型背景下,传统仓储模式已无法满足高效、精准、柔性的物流需求。WCS作为仓储自动化的“神经中枢”,负责协调WMS(仓储管理系统)与自动化设备(如AGV、堆垛机、输送线等)之间的实时交互,确保任务的高效执行。相较于传统PLC(可编程逻辑控制器)直接控制模式,WCS通过智能算法优化任务调度,提升仓储作业的自动化水平与可靠性。

图1 仓储立体库现场示意图
1. WCS系统概述
WCS 即“仓库控制系统”,是智能仓储架构中的执行层系统,其本质是面向设备级联动的控制协调平台。与上层 WMS(仓库管理系统)关注“要做什么”不同,WCS 关注的是“如何去做”、“何时做”、“由谁来做”,它不仅要在毫秒级响应新任务请求,还要确保下达的每一个控制指令在设备物理层面具备可行性和安全性。在整个智能仓储系统中,WMS 提供业务逻辑和任务目标(如入库、出库、移库等),而 WCS 则承担起任务分解、设备分配与路径决策的职责。
WCS 控制的是现实世界的硬件动作。它直接管理 AGV、输送线、堆垛机、提升机等自动化设备,通过 OPC-UA、Modbus TCP、串口或定制 TCP 协议对接 PLC 控制器,负责设备调度、路径选择、故障处理、缓冲协同等任务。
WCS 收到一个“出库任务”时,首先会拆解为多个子任务,例如:“调度提升机至1层”、“AGV从鞍座A1002搬运托盘”、“输送线发送至提升位”,每一个子任务都将被指派给具体的设备。WCS 要从当前所有设备状态中,选择最合适的执行者,并通过任务优先级、路径冲突、实时故障等条件进行调度排序。
以 AGV 举例,WCS 调度AGV系统时,不仅要考虑AGV本身的运行/空闲、电池电量状态,还要考虑其是否会与堆垛机或输送线产生交叉点冲突。这种决策逻辑无法靠 PLC 独立完成,必须由 WCS 进行实时运算与指令发起。
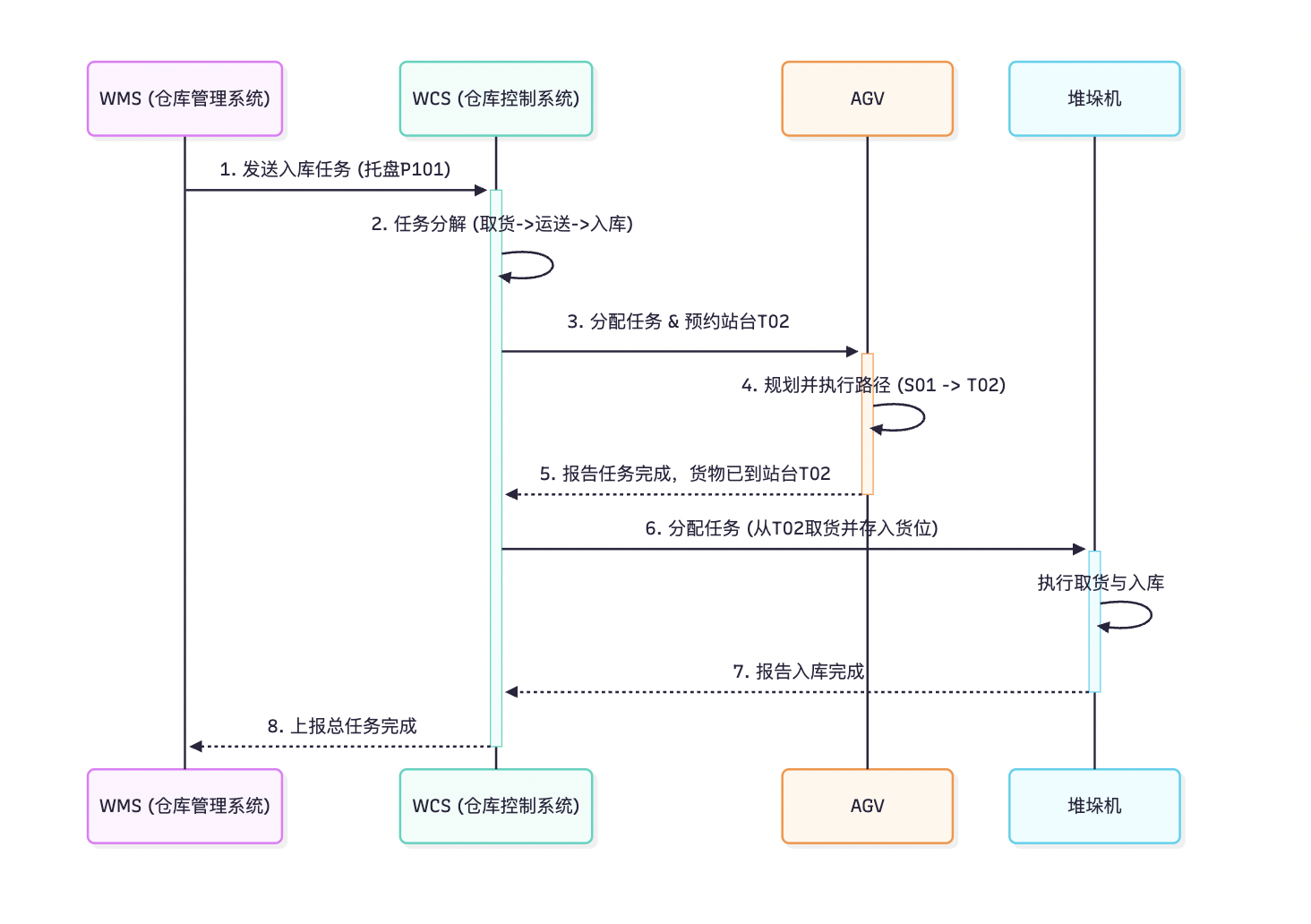
图2 WCS入库流程时序图
下面我们以一个典型的WCS入库流程为例,看WCS是如何运作的:
1)任务下达:WMS通过北向接口向WCS发送指令:“鞍座A001,托盘B0002,入库。”
2) 任务分解:WCS收到任务,将任务分解为“AGV从A001取货 -> 运送至站台 -> 堆垛机从站台取货 -> 存入货架”。
3) 资源调度:WCS调度引擎扫描当前空闲且距离较近的AGV,譬如AGV003;同时,系统会为AGV003预约一个空闲的堆垛机站台,例如Z1002。
4) 路径规划:WCS为AGV003规划从A001到Z1002的最优路径,并下发给AGV相应的取货放货指令。
5) 状态同步:AGV003到达Z1002并放下货物后,向WCS报告任务完成。Z1002站台状态变更为“满载,等待堆垛机处理”。
6) 任务接力:WCS触发下一个子任务,调度负责Z1002站台的堆垛机CGV001执行取货与放货任务。
7) 完成与上报:堆垛机CGV001将货物存入指定货位后,向WCS报告完成。WCS整合所有子任务状态,最终向WMS上报:“托盘B0002入库任务完成”,WMS随即更新库存信息。
2. WCS架构设计:现代自动化的“神经中枢”
一个设计良好的WCS,其架构通常是分层的,以实现高内聚、低耦合,并保证系统的实时性与稳定性。
1) 南北向接口 (Interfaces)
- 北向接口 (Northbound):负责与上层系统(WMS/MES)通信。这是WCS接收任务的入口。通信方式从传统的中间数据库表,到更为现代的Web Service (RESTful API)或消息队列(如Kafka, RabbitMQ),后者在保证数据一致性和高吞吐量方面表现更优。
- 南向接口 (Northbound):负责与具体的自动化设备PLC(可编程逻辑控制器)通信。这是WCS下达指令的出口。通信协议多种多样,如TCP/IP Socket、OPC-UA、S7 Protocol等。
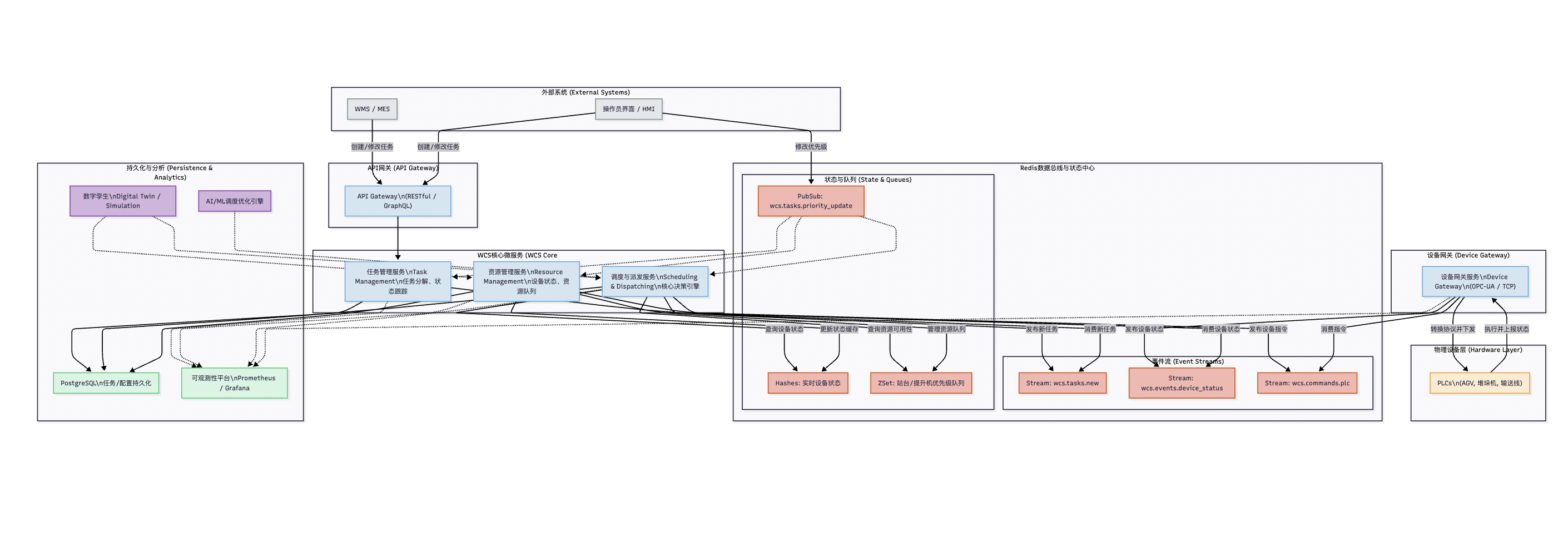
图3 WCS系统架构示意图
2) 核心业务逻辑层 (The Core Engine)
这是WCS系统的关键所在,也是技术挑战最集中的地方。
- 任务管理与队列 (Task Management & Queuing) :WCS从WMS接收到的是一个宏观任务(如“入库托盘A”),它需要将其拆解为一系列具体的设备动作指令(如:AGV取货 -> AGV运行至站台 -> 堆垛机取货 -> 堆垛机入库)。这些指令会进入一个动态的任务队列,等待资源分配。
- 资源调度与状态机 (Resource Scheduling & State Machine) :这是WCS最复杂的部分。系统需要实时维护所有自动化设备(AGV、堆垛机、提升机、站台等)的状态。每个设备都是一个有限状态机(FSM),包含空闲、任务执行中、故障等状态。调度引擎的核心算法需要根据任务的优先级、设备的当前状态、位置等因素,做出最优的“任务-设备”匹配决策。
- 竞态资源规划与冲突解决 (Pathfinding & Conflict Resolution) :这不仅仅是算法问题,更是对并发和锁机制的考验。 例如,对关键路径节点或站台的“预约”和“锁定”机制至关重要,设计不当极易引发系统范围的死锁(Deadlock),导致整个产线停摆。
- 监控与可观测性 (Monitoring & Observability) :通过监控和可观测性,我们可以更好的了解系统当前的运行状态。通过集成Prometheus、Grafana、Loki等工具,我们可以构建实时的监控大盘,展示设备OEE(综合设备效率)、任务延迟、系统吞吐量等关键指标,并通过日志聚合分析,快速定位和排查故障
3. WCS的未来:从“控制”到“智慧”
随着技术的演进,WCS早已不满足于做一个忠实的“执行者”。正如部门近期在大模型与具身机器人领域的探索,AI技术正在为WCS注入新的灵魂。
- AI驱动的动态调度:传统的调度算法多基于固定规则。未来的WCS将利用强化学习等AI技术,根据实时变化的仓库拥堵情况、设备健康状况和订单优先级,动态调整任务分配和路径规划,实现全局最优。
- 数字孪生和仿真:在上线新算法或流程前,先在与物理世界1:1映射的数字仿真环境中进行上万次模拟,预测瓶颈、规避风险。这能极大缩短调试周期,提高系统变更的安全性。
- 具身智能的融合:未来的仓库将是大量具身机器人(Embodied AI)的舞台。WCS将演变为一个“机器人集群大脑”,不仅要下达“去哪里”的指令,更要下达“做什么”的意图。例如,通过我们开发的Agent系统,WCS可以向机器人下达“去盘点A区货架”这样的模糊指令,机器人将基于大模型自主规划行动路径和作业顺序。
4. 结语
WCS是连接信息世界与物理世界的桥梁,是自动化仓库高效运转的心脏。它的设计与实现,不仅考验着开发者对分布式系统、实时通信、并发控制的深刻理解,更需要对仓储业务流程的洞察。随着AI与机器人技术的不断融入,WCS正从单纯的执行系统逐步进化为具有自主决策能力的智能控制平台,有效的推动了仓储物流的效率边界。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号