
【自学嵌入式:stm32单片机】PWM驱动舵机
PWM驱动舵机
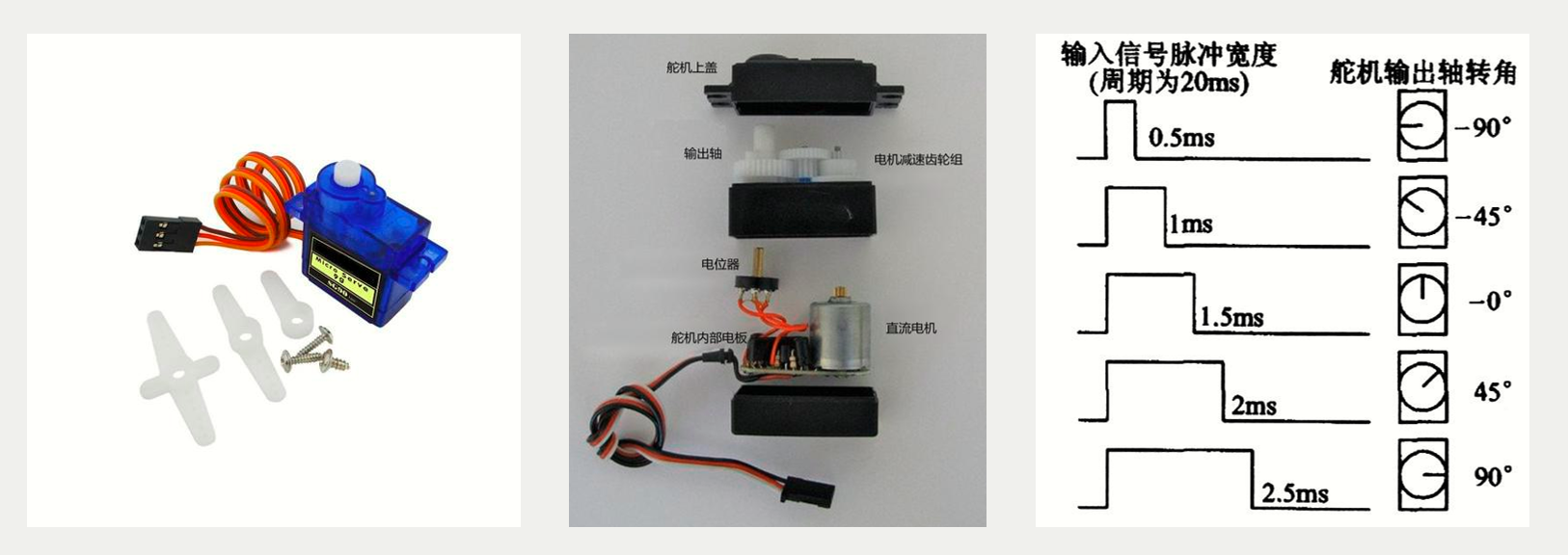
- 舵机是一种根据输入PWM信号占空比来控制输出角度的装置
- 输入PWM信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms
此处是把PWM当作通信协议
硬件电路
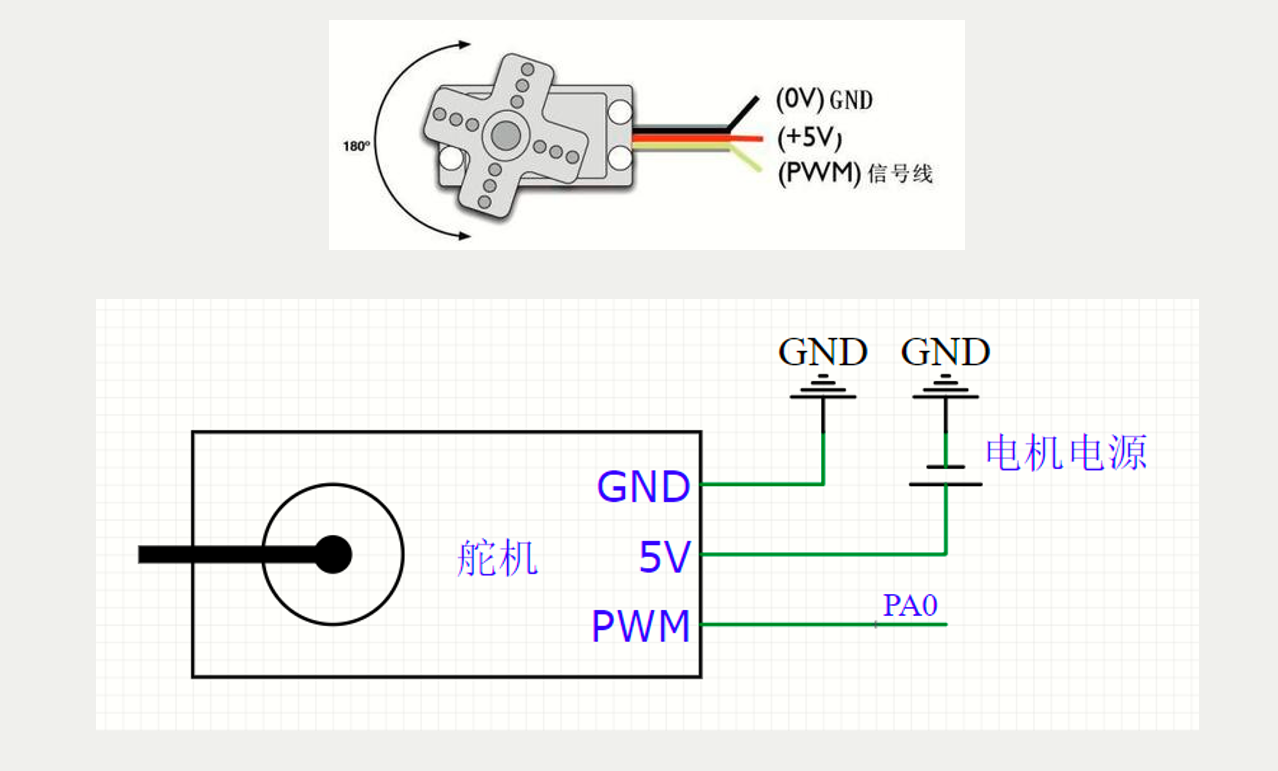
接线图

此处接PA1,用的是定时器TIM2的通道2(对应PA1)
代码实现
标准库实现
已开源到:https://gitee.com/qin-ruiqian/jiangkeda-stm32
PWM.h
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void); //PWM初始化
void PWM_SetCompare2(uint16_t Compare); //调整CCR的值,占空比
#endif
PWM.c
#include "stm32f10x.h" // Device header
//PWM初始化函数
void PWM_Init(void)
{
//初始化PA0
//打开APB2总线的GPIOA外设并开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出,
//普通推挽/开漏输出,引脚控制权是来自于输出数据寄存器的
//如果想用定时器来控制引脚,就需要使用复用开漏/推挽输出的模式
//在这里输出数据寄存器将被断开,输出控制权将转移给片上外设
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //A1口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//开启时钟,TIM2是APB1总线的外设
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
//选择时基单元的时钟,选择内部时钟
TIM_InternalClockConfig(TIM2); //TIM2的时钟单元由内部时钟来驱动
// 初始化时基单元用的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择滤波器1分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
//定时频率=72MHz/(PSC+1)/(ARR+1)
//定时1s,也就是定时频率为1Hz
TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARR,16位寄存器,在0-65535范围
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSC,16位寄存器,在0-65535范围
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级计数器才有的,置0就行,TIM2-TIM4是通用计数器
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
//初始化OC输出比较单元
//使用PA1口,对应第二个输出比较通道
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋初值
//TIM_OCInitStructure.TIM_OCIdleState = ; //高级定时器才用到
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置比较模式
//TIM_OCInitStructure.TIM_OCNIdleState = ; //高级定时器才用到
//TIM_OCInitStructure.TIM_OCNPolarity = ; //高级定时器才用到
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置输出比较的极性,REF有效时输出高电平
//TIM_OCInitStructure.TIM_OutputNState = ; //高级定时器才用到
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置输出使能
//PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)(也是计数器的更新频率)
//PWM占空比: Duty = CCR / (ARR + 1)
//PWM分辨率: Reso = 1 / (ARR + 1)
//舵机周期是20ms,取倒数,1/20x10^(-3)=1000/20=50Hz
//所以Freq=50Hz
//占空比,舵机要求高电平事件是0.5ms~2.5ms
//PSC+1=72, ARR+1=20 000
//20K对应20s,那CCR设置为500,就是0.5ms
//CCR设置为2500,就是2.5ms
TIM_OCInitStructure.TIM_Pulse = 0; //设置CCR
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //使用TIM2的OC2,也就是CH2通道,输出PWM,只能在PA1的引脚上输出,而不能选择任意引脚输出
//如果一个定时器驱动不同舵机,使用同一个定时器不同通道的PWM
//就完全可以,不同通道共用一个计数器,所以它们的频率是一样的
//占空比可以通过各自的CCR决定
//使用同一个定时器不同通道的PWM就完全可以了
//启动定时器
TIM_Cmd(TIM2, ENABLE);
}
//调整CCR的值(占空比)
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM2, Compare);
}
Servo.h
#ifndef __SERVO_H
#define __SERVO_H
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endif
Servo.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
//初始化舵机
void Servo_Init(void)
{
PWM_Init();
}
//0度--500
//180度--2500
//设置舵机角度
void Servo_SetAngle(float Angle)
{
PWM_SetCompare2(Angle / 180 * 2000 + 500);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "MYOLED.h"
#include "Servo.h"
#include "Key.h"
uint8_t KeyNum; //按键键码
float Angle; //舵机旋转角度
int main(void)
{
Servo_Init();
MYOLED_Init();
Key_Init();
MYOLED_ShowString(0,0, "Angle:");
while(1)
{
KeyNum = Key_GetNum();
if(KeyNum == 1)
{
Angle += 30;
if(Angle > 180)
{
Angle = 0;
}
}
Servo_SetAngle(Angle);
MYOLED_ShowNum(6, 0, Angle, 3);
}
}
HAL库实现
我设计的思路是能不动STM32CubeIDE生成的代码结构就不动,在此基础上添加响应的模块,已开源到:https://gitee.com/qin-ruiqian/jiangkeda-stm32-hal
PWM.h
/*
* PWM.h
*
* Created on: Aug 13, 2025
* Author: Administrator
*/
#ifndef HARDWARE_PWM_H_
#define HARDWARE_PWM_H_
void PWM_Init(TIM_HandleTypeDef tim); //初始化PWM
void PWM_SetCompare(uint16_t Compare); //调整CCR占空比
#endif /* HARDWARE_PWM_H_ */
PWM.c
/*
* PWM.c
*
* Created on: Aug 13, 2025
* Author: Administrator
*/
#include "stm32f1xx_hal.h"
//把初始化定时器TIM2的过程放到PWM里面
TIM_HandleTypeDef htim; //当前用的是哪个定时器
//初始化PWM
void PWM_Init(TIM_HandleTypeDef tim)
{
//开启对应定时器
htim = tim;
HAL_TIM_PWM_Start(&htim, TIM_CHANNEL_2);
}
//调整CCR的值(占空比)
void PWM_SetCompare(uint16_t Compare)
{
htim.Instance->CCR2 = Compare; //舵机用的通道2
}
Servo.h
/*
* Servo.h
*
* Created on: Aug 13, 2025
* Author: Administrator
*/
#ifndef HARDWARE_SERVO_H_
#define HARDWARE_SERVO_H_
void Servo_Init(TIM_HandleTypeDef tim);
void Servo_SetAngle(float Angle);
#endif /* HARDWARE_SERVO_H_ */
Servo.c
/*
* Servo.c
*
* Created on: Aug 13, 2025
* Author: Administrator
*/
#include "stm32f1xx_hal.h"
#include "PWM.h"
//初始化舵机
void Servo_Init(TIM_HandleTypeDef tim)
{
PWM_Init(tim);
}
//0度--500
//180度--2500
//设置舵机角度
void Servo_SetAngle(float Angle)
{
PWM_SetCompare(Angle / 180 * 2000 + 500);
}
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "Servo.h"
#include "Key.h"
#include "MYOLED.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
uint8_t KeyNum; //键码值
float Angle; //舵机旋转角度
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
MYOLED_Init();
Servo_Init(htim2);
MYOLED_ShowString(0,0, "Angle:");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
KeyNum = Key_GetNum();
if(KeyNum == 1)
{
Angle += 30;
if(Angle > 180)
{
Angle = 0;
}
}
Servo_SetAngle(Angle);
MYOLED_ShowNum(6, 0, Angle, 3);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 71;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 19999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_SET);
/*Configure GPIO pins : PB1 PB11 */
GPIO_InitStruct.Pin = GPIO_PIN_1|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PB8 PB9 */
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */

 浙公网安备 33010602011771号
浙公网安备 33010602011771号