
【深度学习数学基础:线性代数】4. 线性空间及线性映射:4.2 几何解释
4. 特征值特征向量
4.2 几何解释
\(\boldsymbol{A} \boldsymbol{x}\) 是一个线性变换,变换对应的矩阵为 \(\boldsymbol{A}\)。前面介绍过,若 \(\boldsymbol{V}\) 是 \(\{\boldsymbol{x}\}\) 张成的向量空间(此向量空间的维度为1,因为只有一个基向量),那么任意 \(\lambda \boldsymbol{x} \in \boldsymbol{V}\)。所以 \(\boldsymbol{A} \boldsymbol{x} = \lambda \boldsymbol{x}\) 是从 \(\boldsymbol{V}\) 到 \(\boldsymbol{V}\) 自身的映射,\(\boldsymbol{V}\) 也称为 \(\boldsymbol{T}\) 下的不变子空间(求 \(\boldsymbol{A}\) 的特征向量,就是求 \(\boldsymbol{A}\) 的不变子空间)。
若把 \(\boldsymbol{A}\) 看作线性变换系统,\(\boldsymbol{x}\) 就是系统固有的特征,\(\lambda\) 则是该系统对固有特征产生的增益。(增益就是多少倍的意思)
从几何变换的角度来看,如果 \(\boldsymbol{A}\) 是缩放矩阵,\(\boldsymbol{A} \boldsymbol{x}\) 相当于对向量 \(\boldsymbol{x}\) 缩放。在缩放过程中,大部分向量的方向会发生改变,少数特殊向量的方向不变。
【注】
- 通俗理解不变子空间和线性变换系统
- 先搞懂:什么是线性变换系统?
- 简单说:线性变换系统就像一台“向量加工机器”,输入一个向量\(\boldsymbol{x}\),它会按照固定规则(由矩阵\(\boldsymbol{A}\)决定)输出一个新向量\(\boldsymbol{A}\boldsymbol{x}\)。
- 例子:
- 缩放机器:输入\(\boldsymbol{x}=(x,y)\),输出\(\boldsymbol{A}\boldsymbol{x}=(2x,2y)\)(把向量拉长2倍),这里\(\boldsymbol{A}\)是缩放矩阵。
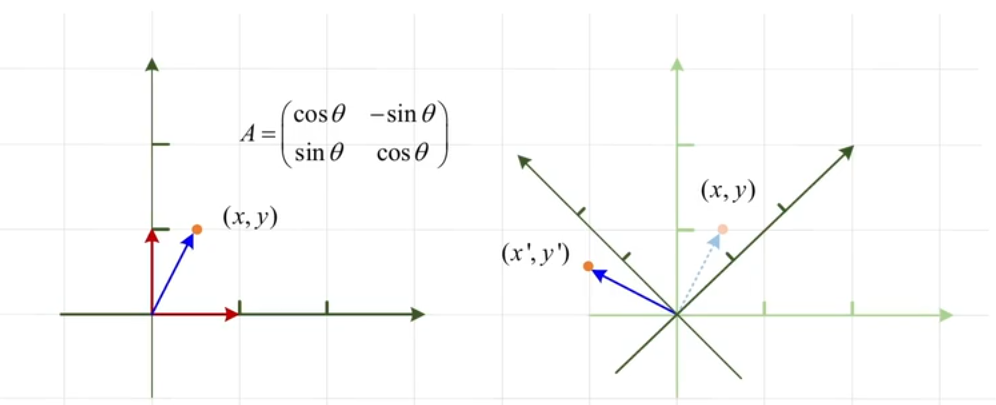
- 旋转机器:输入\(\boldsymbol{x}=(x,y)\),输出\(\boldsymbol{A}\boldsymbol{x}=(x\cos\theta-y\sin\theta, x\sin\theta+y\cos\theta)\)(绕原点转\(\theta\)角),这里\(\boldsymbol{A}\)是旋转矩阵。
- 核心:这个“机器”的规则必须是“线性”的——比如输入\(\boldsymbol{x}+\boldsymbol{y}\),输出等于\(\boldsymbol{A}\boldsymbol{x}+\boldsymbol{A}\boldsymbol{y}\);输入\(k\boldsymbol{x}\)(\(k\)是常数),输出等于\(k\boldsymbol{A}\boldsymbol{x}\)。
- 再理解:什么是不变子空间?
- 先回忆“子空间”:由一堆向量\(\{\boldsymbol{x}\}\)通过线性组合(比如\(k_1\boldsymbol{x}_1+k_2\boldsymbol{x}_2\))张成的“向量区域”,比如平面上所有水平向量\((x,0)\)张成的\(x\)轴,就是一个子空间。
- 不变子空间:如果把这个“向量区域”里的任意向量\(\boldsymbol{x}\)放进线性变换系统\(\boldsymbol{A}\),输出的\(\boldsymbol{A}\boldsymbol{x}\)仍然在这个区域里,就说这个区域是“\(\boldsymbol{A}\)下的不变子空间”。
- 例子:
- 对缩放矩阵\(\boldsymbol{A}=\begin{pmatrix}2&0\\0&3\end{pmatrix}\),\(x\)轴(子空间\(\{\boldsymbol{x}=(x,0)\}\))是不变子空间:输入\((x,0)\),输出\((2x,0)\),仍在\(x\)轴上。
- 对特征向量\(\boldsymbol{p}\):由\(\boldsymbol{p}\)张成的子空间\(V=\{k\boldsymbol{p}\}\)(所有\(\boldsymbol{p}\)的倍数)一定是不变子空间——因为\(\boldsymbol{A}\boldsymbol{p}=\lambda\boldsymbol{p}\),输出\(\lambda\boldsymbol{p}\)仍在\(V\)里(这就是“求特征向量就是求不变子空间”的原因)。
- 两者的关系:不变子空间是线性变换系统的“稳定区域”
- 线性变换系统\(\boldsymbol{A}\)会改变大部分向量的“位置”,但不变子空间里的向量很特殊——无论怎么被\(\boldsymbol{A}\)加工,都不会跑到区域外面。
- 比如:旋转机器绕\(z\)轴旋转时,\(z\)轴本身(子空间\(\{\boldsymbol{x}=(0,0,z)\}\))就是不变子空间——不管怎么转,\(z\)轴上的向量方向始终不变,只是可能长度变化(如果有缩放的话)。
- 一句话总结:
- 线性变换系统:按矩阵规则加工向量的“机器”;
- 不变子空间:在这个“机器”加工下,始终保持“内部封闭”的向量区域。
- 几何变换视角下的特征值与特征向量(以缩放矩阵为例)
-
- 缩放矩阵的变换规则
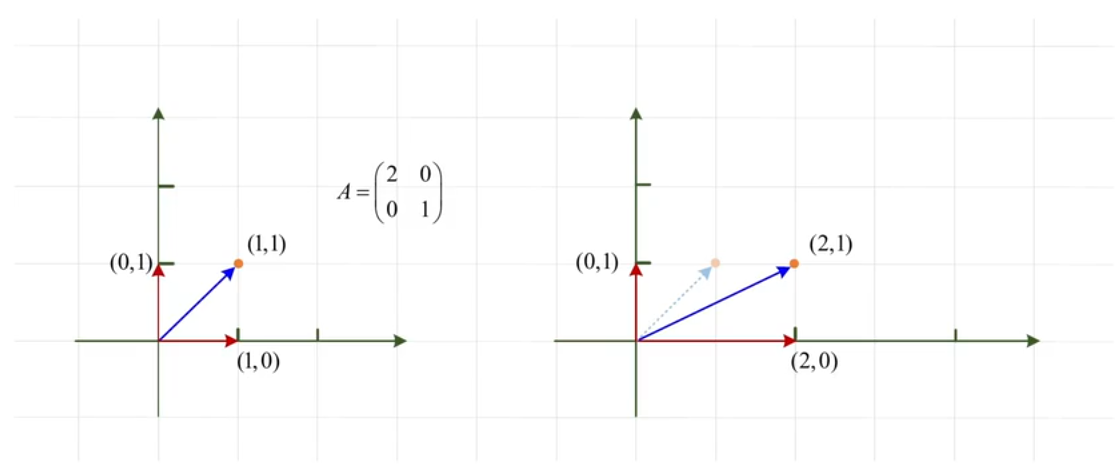
设缩放矩阵 \(\boldsymbol{A} = \boldsymbol{\begin{pmatrix} 2 & 0 \\ 0 & 1 \end{pmatrix}}\),对二维向量 \(\boldsymbol{x} = \boldsymbol{\begin{pmatrix} x \\ y \end{pmatrix}}\) 的变换为:
\[\boldsymbol{A}\boldsymbol{x} = \boldsymbol{\begin{pmatrix} 2x \\ y \end{pmatrix}} \]几何意义:将向量的 \(x\) 分量放大 2 倍,\(y\) 分量保持不变(即沿 \(x\) 轴方向缩放 2 倍,沿 \(y\) 轴方向缩放 1 倍)。
- 缩放矩阵的变换规则
-
- 普通向量的方向变化
对非特殊向量(如 \(\boldsymbol{x} = \boldsymbol{\begin{pmatrix} 1 \\ 1 \end{pmatrix}}\)),变换后为 \(\boldsymbol{A}\boldsymbol{x} = \boldsymbol{\begin{pmatrix} 2 \\ 1 \end{pmatrix}}\):
- 原向量斜率为 \(1\)(\(y = x\)),变换后斜率为 \(\boldsymbol{\dfrac{1}{2}}\)(\(y = \dfrac{x}{2}\)),方向发生明显改变(图中虚线箭头 vs 实线箭头)。
- 普通向量的方向变化
-
- 特殊向量的方向不变性
对 x 轴方向向量(如 \(\boldsymbol{p}_1 = \boldsymbol{\begin{pmatrix} 1 \\ 0 \end{pmatrix}}\)):
变换后为 \(\boldsymbol{A}\boldsymbol{p}_1 = \boldsymbol{\begin{pmatrix} 2 \\ 0 \end{pmatrix}} = 2\boldsymbol{p}_1\),方向仍沿 x 轴(未拐弯),仅长度放大 2 倍。
对 y 轴方向向量(如 \(\boldsymbol{p}_2 = \boldsymbol{\begin{pmatrix} 0 \\ 1 \end{pmatrix}}\)):
变换后为 \(\boldsymbol{A}\boldsymbol{p}_2 = \boldsymbol{\begin{pmatrix} 0 \\ 1 \end{pmatrix}} = 1\boldsymbol{p}_2\),方向仍沿 y 轴(未拐弯),长度保持不变(放大 1 倍)。 - 特殊向量的方向不变性
-
- 特征值与特征向量的定义
- 特征向量:变换后 方向不变(仅缩放) 的非零向量(如 \(\boldsymbol{p}_1, \boldsymbol{p}_2\))。
- 特征值:缩放的 倍数(\(\boldsymbol{p}_1\) 对应 \(\lambda_1 = 2\),\(\boldsymbol{p}_2\) 对应 \(\lambda_2 = 1\))。
数学表达:若 \(\boldsymbol{A}\boldsymbol{p} = \lambda\boldsymbol{p}\)(\(\boldsymbol{p} \neq \boldsymbol{0}\)),则 \(\boldsymbol{p}\) 是特征向量,\(\lambda\) 是特征值。
-
- 几何意义总结
从几何变换看:
- 缩放矩阵 \(\boldsymbol{A}\) 会改变 大部分向量的方向(如 \(\boldsymbol{\begin{pmatrix} 1 \\ 1 \end{pmatrix}}\));
- 仅少数 特殊向量(特征向量) 能“抵抗方向变化”,只被拉伸/压缩(如 \(x\) 轴、\(y\) 轴方向的向量);
- 特征值描述了这种 拉伸/压缩的力度(正数表示同方向缩放,负数可表示反方向缩放,图中未体现)。
图中例子直观展现:\(x\) 轴方向是 \(\boldsymbol{A}\) 的“特征方向”,对应特征向量 \(\boldsymbol{p}_1\) 和特征值 \(2\);\(y\) 轴方向也是“特征方向”,对应特征向量 \(\boldsymbol{p}_2\) 和特征值 \(1\)。
- 几何意义总结
-
如果把 \(\boldsymbol{A}\) 看作旋转矩阵,如何理解 \(\boldsymbol{A}\boldsymbol{x} = \boldsymbol{x}\) ?若 \(\theta = 2k\pi\)(\(k\) 为整数),所有点都不发生变化;若 \(\theta \neq 2k\pi\),找不到实数域内方向不变的 \(\boldsymbol{x}\)。这是否意味着 \(\theta \neq 2k\pi\) 时 \(\boldsymbol{A}\) 找不到特征值和特征向量?
答:特征值、特征向量依然存在,只不过是在 复数域 中。通过特征方程推导:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号