
2023年奔走的总结---吉特日化MES 智能搬运AGV 篇三
2023-12-13 09:04 贺臣 阅读(1169) 评论(0) 收藏 举报《2023年奔走的总结---吉特日化MES 项目趣事 篇一》
《2023年奔走的总结---吉特日化MES 制药项目 篇二》
《2023年奔走的总结---吉特日化MES 智能搬运AGV 篇三》
上篇文章写到了今年关于制药医疗器械相关的项目,本篇文章将重点总结一下今年遇到的AGV项目,今年经过几个AGV项目对车间搬运有了更深的理解。几年前AGV在电商物流行业里面显得非常耀眼,是不是来一个电商仓库几十台,上百台AGV的调度,场面甚是壮观,但是之前这种项目机会也是可遇不可求,得有足够的资金投入,还有很多厂商的AGV技术还不够成熟也是非常多的问题。最近一些年随着智能制造的概念普及,AGV在生产车间的使用也是越来越多了,车间智能搬运也不是有钱的大企业专属了。
七、某咖啡配送仓
接触到这个项目也是偶然机会,是朋友介绍说我这边有AGV项目经验,然后他们想找一个会AGV,同时懂仓库以及调度的人帮忙做这个项目,最关键是想找个低价的,朋友让我去试试于是就自己亲自下场了。
项目要求:对立库流水分拣线进行改造,将分拣之后的产品实现自动化搬运取代人工
项目硬件方: 某堆垛机立库,某RGV轨道搬运小车,某二维码AGV小车,某自动化工业提升机,某自动化流水分拣线
软件方:某厂家大WMS系统,某厂家小WMS系统,AGV小车调度系统(RCS系统),我方 WCS系统(集成AGV小车,RGV小车,自动输送线,工业提升机,自动叠盘机)
流程描述:
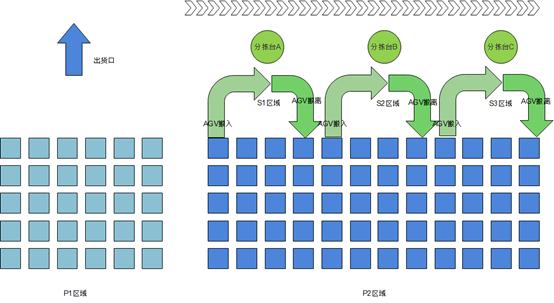
(1) 将仓库整体继续功能区划分:分拣口,分拣口缓存区,空托区,满拖区,发货区,叠盘区(硬件改造受限,此部分自动化搬运未实现)
(2) 立库堆垛机接收到发货订单之后,堆垛机取托盘通过RGV小车将托盘运输到分拣口
(3) RGV 小车进入到分拣口,通过光电传感器感应托盘到达分拣口
(4) 人工分拣托盘上的产品,将托盘上分拣出来的箱通过分拣输送线输送到下游,然后人工将分拣之后的箱重新放到空托盘上,最后进行发货
(5) 分拣之后的托盘通过自动提升机或工业电梯发到装车口进行发货
(6) 发货之后的释放的托盘,通过叠盘机将空托盘叠加到一起,然后进入到立库中存储。
改造要求:
(1) 拆卸掉所有的人工分拣输送线,将仓库空间利用率增大。人工分拣的过程暂时不变(分期改造,后期可能采用机械手进行分拣替代人工)
(2) 人工分拣之后的托盘进入临时区或者满拖区,之前采用人工叉车方式改造为使用AGV自动实现搬运
(3) 人工分拣之前需要使用空托盘,之前是采用人工叉车或者人力搬运的方式获取,需要通过进入到分拣口的托盘产品自动呼叫AGV搬运空托盘或者未满托盘
(4) 上层系统下发发货指令之后,人工使用叉车将满托盘搬运到发货口或者直接搬运到提升机,改造之后得到指令AGV自动搬运对应的托盘到发货口或提升机
(5) 分拣要求:一个托盘货可以对应一个或多个客户订单,一个客户订单可能有多品类分布在不同的托盘中,一个订单可能需要一个或多个托盘分拣,分拣托盘未满的情况需要重复使用 【托盘:是指立库中存储产品的托盘,分拣托盘:是指仓库中产品分拣之后的发货托盘】
(6) 分拣口自动读取立库托盘,将指令发送给分拣系统
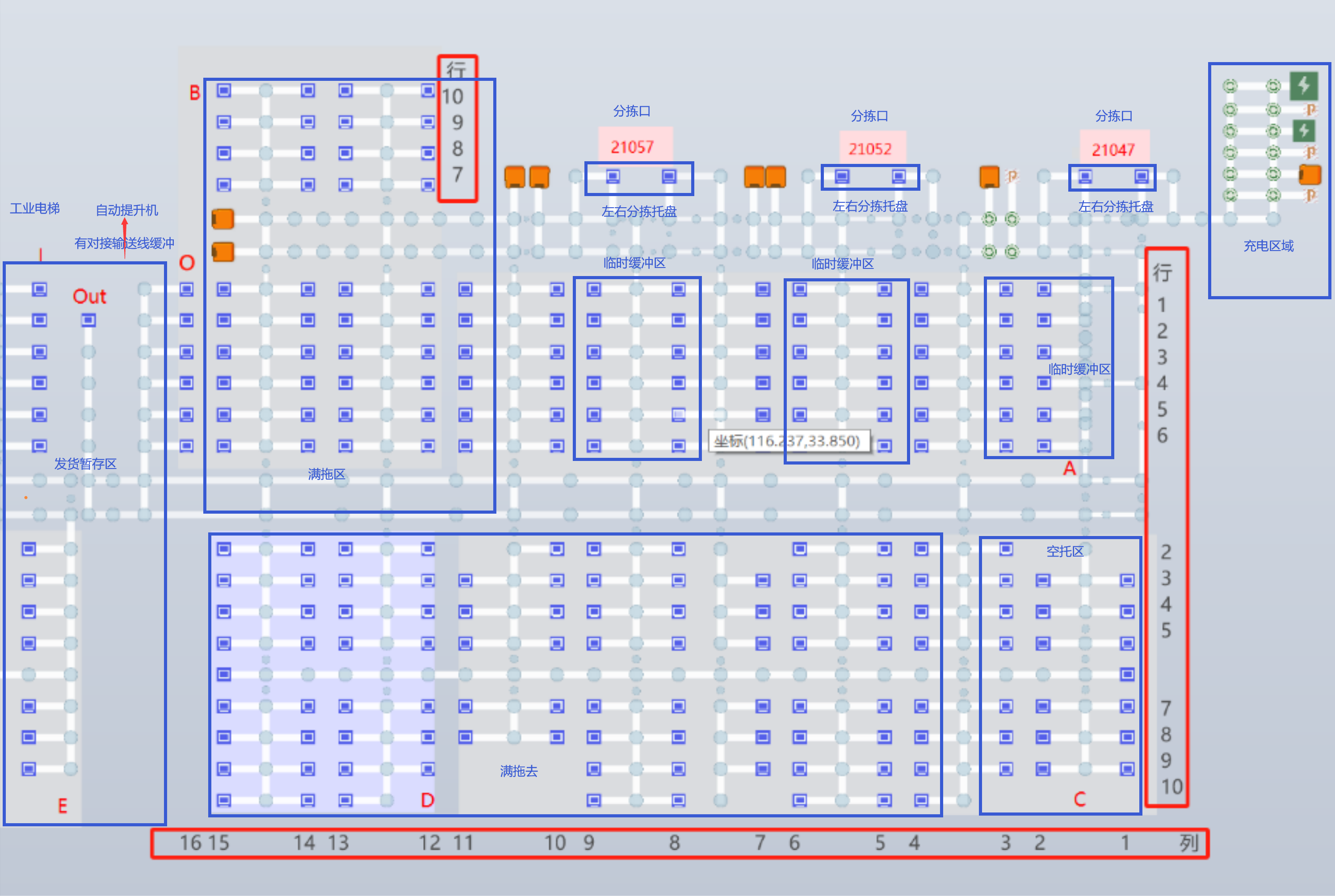
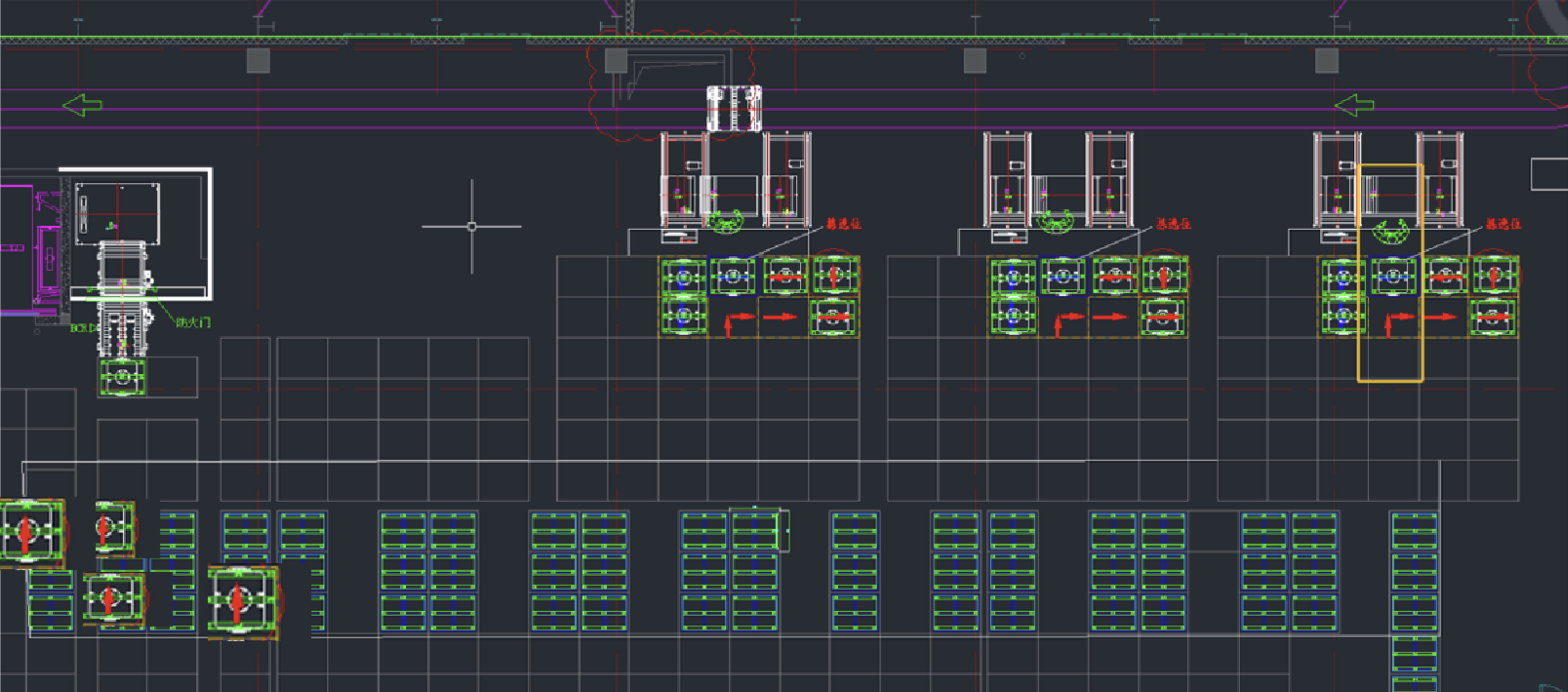
路线定义:
路线一:空托区--左右分拣托盘(临时缓冲区--左右分拣托盘) 光电传感器感应到立库出来的托盘之后,根据托盘上的产品判断有哪些订单需要该产品,同时分拣系统分配一个空托盘或者一个该订单未满的托盘到左右分拣托盘位。
路线二:人工分拣完成之后(将立库托盘上的货物分拣到左右分拣托盘位上的托盘),将托盘搬运到临时缓冲区或满拖区
路线三: 波次分拣指令完成之后,将临时缓冲区托盘搬运到满拖区或搬运到发货暂存区
路线四: 接收到发货指令将 满拖区托盘搬运到发货暂存区
路线五: 自动发货将发货暂存区托盘搬运到自动提升机对接的辊筒输送线上
路线六: 发货完成之后,空托放置于发货暂存区,通过PDA扫描确认发货完成,AGV自动空托盘搬运到空托存储区

AGV项目的总结经验:
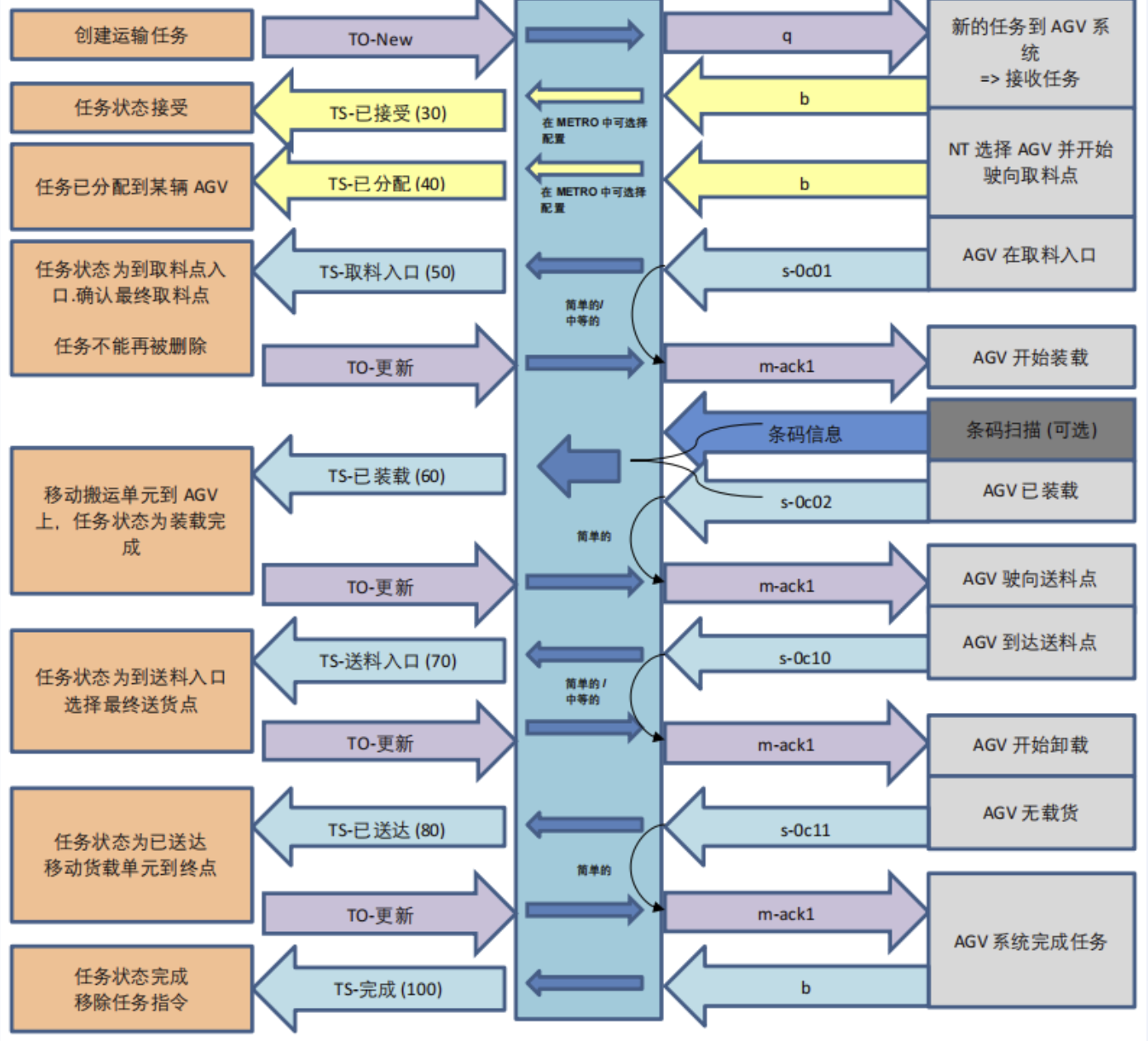
(1) AGV 系统和其他上位系统集成其实是非常简单的,生成一个点对点的搬运基本没有难度
(2) 自动化仓库的WMS与传统的扫描作业仓库有一个很大的区别,就是要管理:载具的中间状态,库位的锁定状态 (AGV小车或其他搬运设备运行过程中的状态)
(3) 要想实现各种物流搬运设备之间的集成,需要有统一的调度系统(WCS)协同,用于连接 堆垛机,穿梭车,输送线,机械手,AGV,提升机 等等,特别是涉及到不同品牌的设备
(4) AGV项目最难的部分在于调度系统,特别是对搬运效率的优化,而且搬运效率除了何时下发搬运指令到AGV同时还要AGV的位置,排队等问题
(5) AGV 项目中如果涉及到任务调度排队的问题,特别是涉及到多深度搬运料箱或者其他载具的时候,多车路径冲突问题解决,比如先后A,B两车去同一个巷道去搬运托盘,结果B车先到目标巷道,这个时候可能会拥堵的情况
(6) 当人流和物流混合作业的时候,简单的靠AGV的调度系统管控库位已经无法实现,人工作业必须要和RCS系统的之间的库位,载具数据保持同步
(7) AGV搬运任务,大部分情况会涉及到跨中间过程障碍物的情况(比如停止等待其他任务,比如与输送线交互,或者过提升机,电梯等),那这种情况建议将一个复杂的搬运过程分级为多个点对点的搬运任务
(8) AGV 搬运过程中的异常处理是必须关注到的,如果AGV一切顺畅运行还好,如果发生搬运异常(设备故障,堵塞,任务错乱等),那么恢复到正常状态是一个比较难的过程,所以必须要考虑异常情况
(9) 为了提高搬运的效率,可以设定缓冲区,可以设定单车固定任务或者固定区域运行,尽可能减少同一辆车干不同种类型的搬运(比如尽量不要车跨楼层,既收货又发货等)
(10) 下发任务的时间点,与设备PLC通讯的时间频率控制是非常值得研究的问题
八、其他搬运项目
今天经历了好几个AGV相关的项目,总体来说AGV的项目都比较简单,车间中的AGV项目比电商仓库的AGV项目还是相对简单许多。一般制造型企业AGV的数量都少于电商仓库的AGV数量,不会出现较为复杂的调度。
(1) 常规的AGV项目要实现车体的运动都非常简单,一般来说就是调用厂商的API接口即可
(2) 要想AGV车稳定持续的运行,这个需要不断的优化路径和调度程序
(3) AGV常规对接设备包含:输送线接驳口(堆垛机,穿梭车等一般都会有延伸的缓冲接驳口),机械手,提升机/电梯
(4) AGV也分好多种:潜伏式,叉车式,料箱式,而AGV的选型一定要根据使用场景来选择
(5) 做AGV等自动化搬运项目,首先就要考虑载具的标准化,如果不能将载具标准化后续的问题也非常多
(6) 一般AGV上来之后达到的运行效率都没有厂家宣传的那么好,一般厂家宣传的都是理想环境和空载情况
(7) 要想AGV显得智能,那就必须在调度系统上下功夫
(8) 在制造业中生产车间中使用AGV,一定要考虑环境因素,比如视觉的要考虑光照,二维码是否可以地面贴码,地面平整度,是否要穿物理空间跨障碍物,是否和其他设备有交互,人流和物流是否冲突,人工是否参与到搬运
(9) 单纯的靠AGV本身的调度系统是无法实现车间物料搬运高效提升的,必须有上层的系统关联(生产业务流触发式的指令下发)
(10) 与其他的设备的集成,就是信号的交互过程,遵循一个基本的交互流程。交互涉及到的协议 S7,OPC,Modbus 等
汇总了一部分车间物流相关的要素点,可以参考
作者:情缘
出处:http://www.cnblogs.com/qingyuan/
关于作者:从事仓库,生产软件方面的开发,在项目管理以及企业经营方面寻求发展之路
版权声明:本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文链接。
联系方式: 个人QQ 821865130 ; 仓储技术QQ群 88718955,142050808 ; 15800466429 同微信
吉特仓储管理系统 开源地址: https://github.com/hechenqingyuan/gitwms
吉特日化MES 演示地址: http://mes.gitwms.com/
标签: 吉特仓储管理系统(开源WMS),吉特日化生产执行制造系统(日化MES),称量防差错系统,投料防差错系统

 浙公网安备 33010602011771号
浙公网安备 33010602011771号