

运动控制理论(3)——机械臂控制
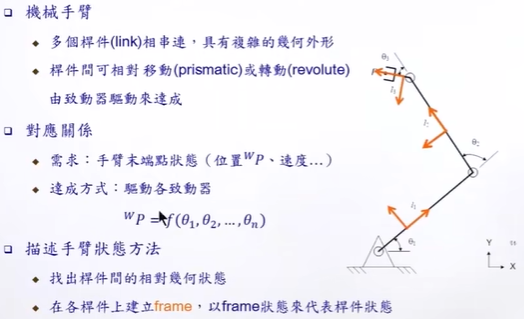
正算
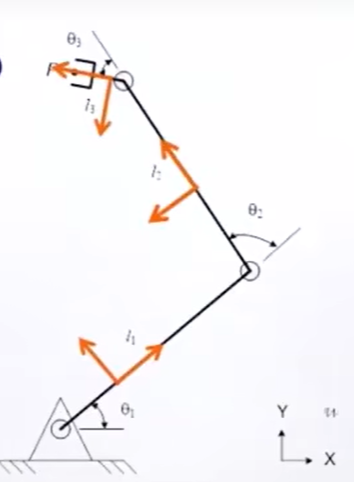
已知各个关机的角度,θ1,θ2,θ3,以及臂长,求末端在世界坐标系下位置Position,三维速度。
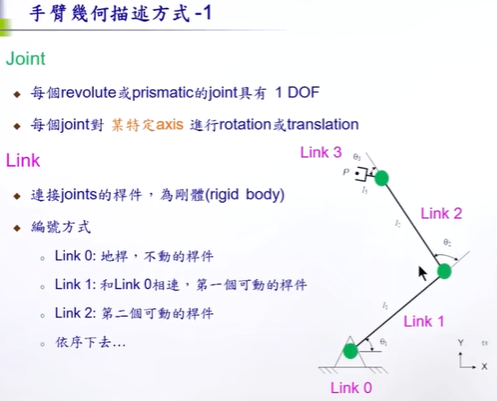
几个概念
Join:指一个关节
每个关节只能绕一个轴转rotation,或者沿一个轴伸缩translation。
Link :刚体,jions的连接体
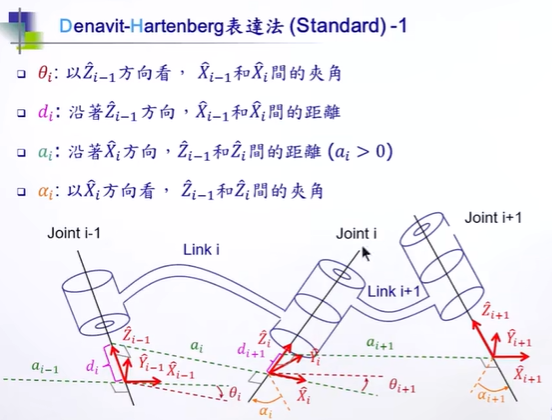
两个参数:
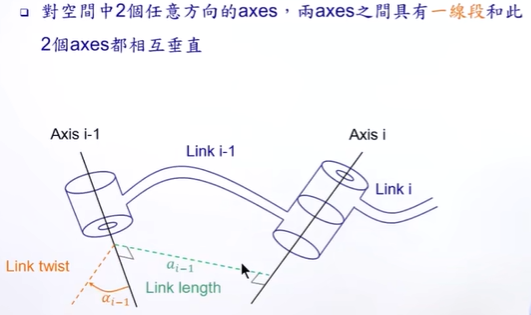
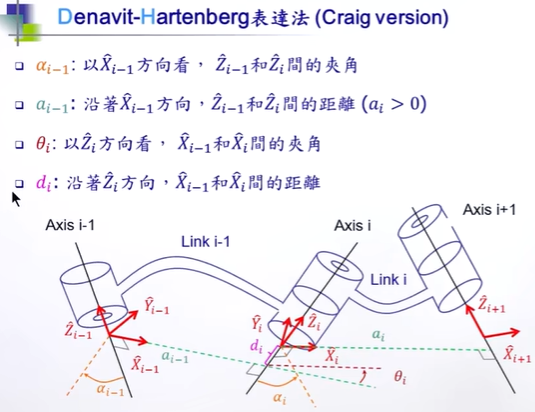
Link length:唯一连接,且垂直于空间两条线的线段,长度。
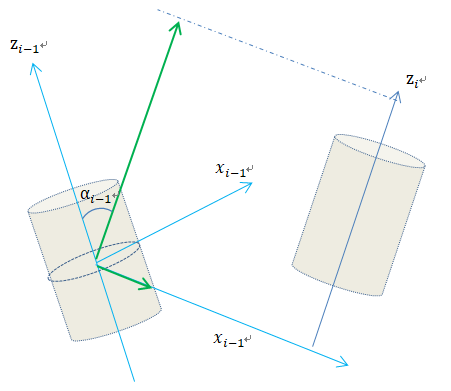
Link twist:就是两个轴的夹角(和向量夹角可能是不同的)
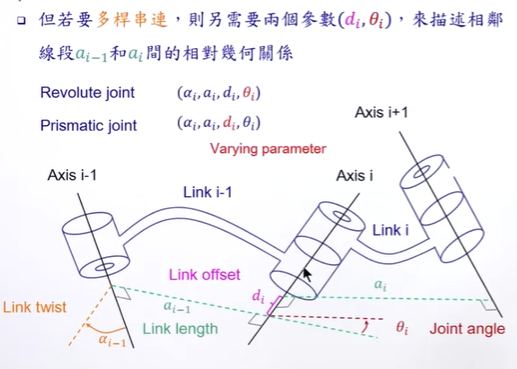
Link offset:就是di了
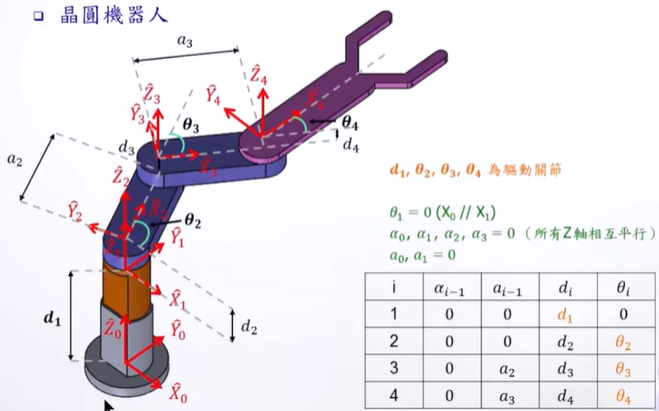
轴要么变di,要么变θ,(思考,如果d和θ同时变,那是不是分成两个jion好一点??)
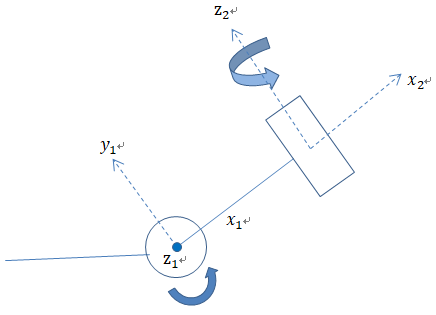
轴的定义
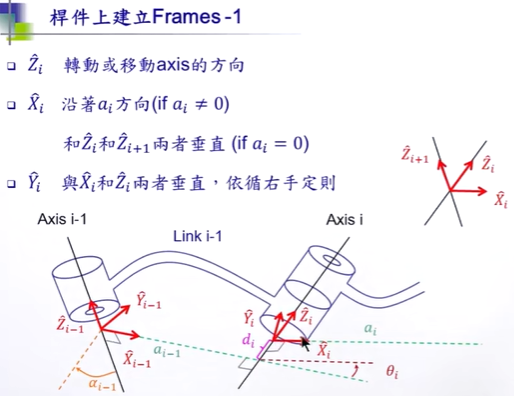
z轴沿着旋转的方向
x轴沿着Link方向,指向下一个Join。
(按照定义、步骤逐步转换)
另一种方法
(旋转都是绕Z轴旋转)
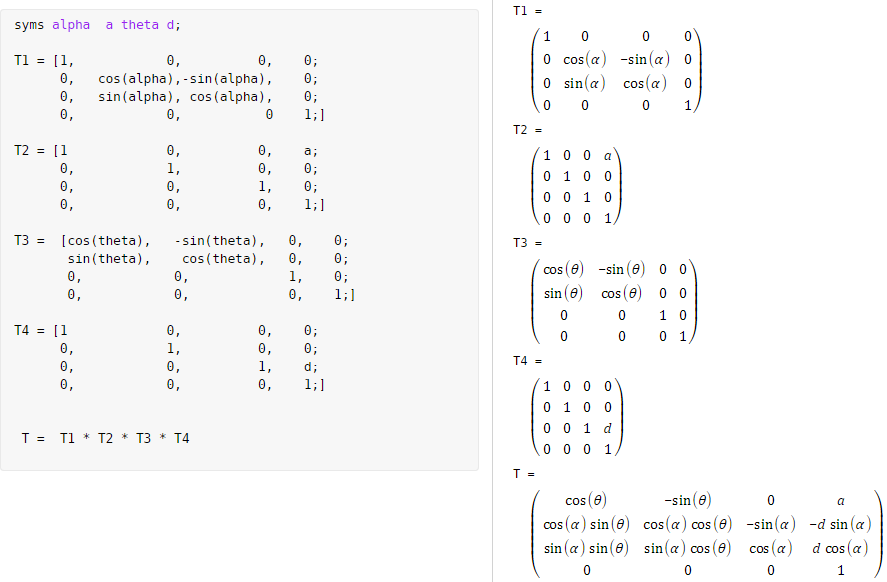
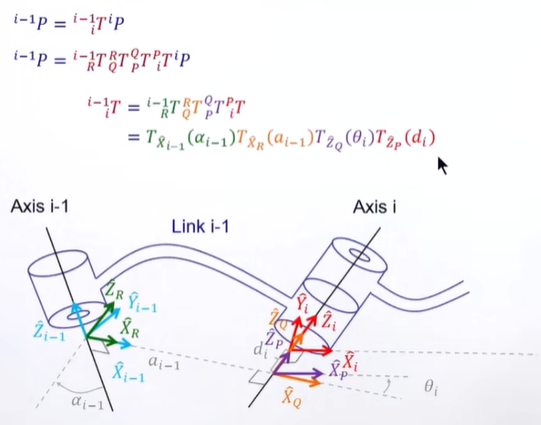
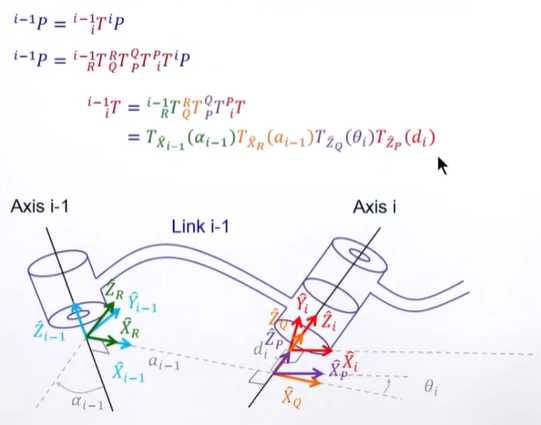
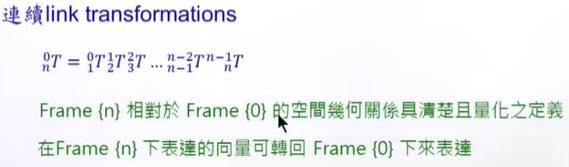
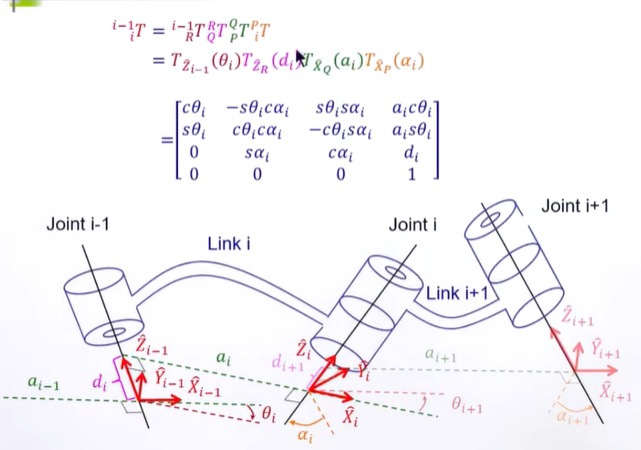
Link Transformations
以 “欧拉角” 的方式去理解,矩阵从左往右乘
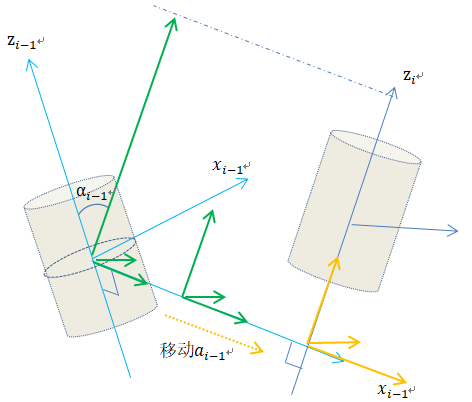
1. 先绕X轴旋转:αi-1 。(这种通常是90度)
2. 然后沿着xi-1轴,移动ai-1
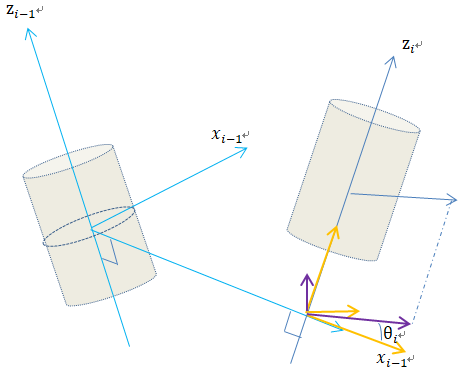
3. 然后绕旋转之后的Zi轴,旋转θi
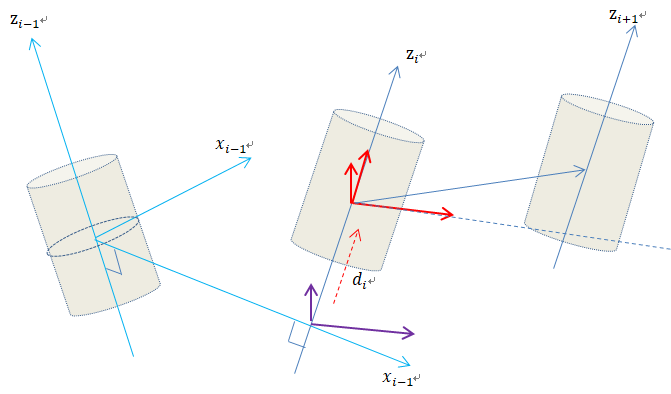
4. 然后沿旋转之后的Zi轴,移动di
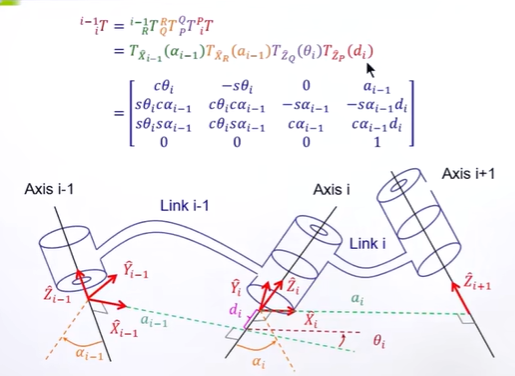
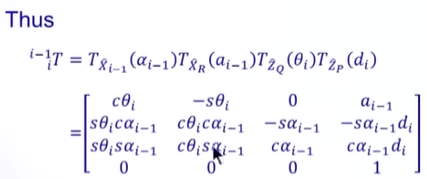
整个过程,可以表达为
Pi-1 = T i-1i Pi
Pi 是i系下的局部坐标
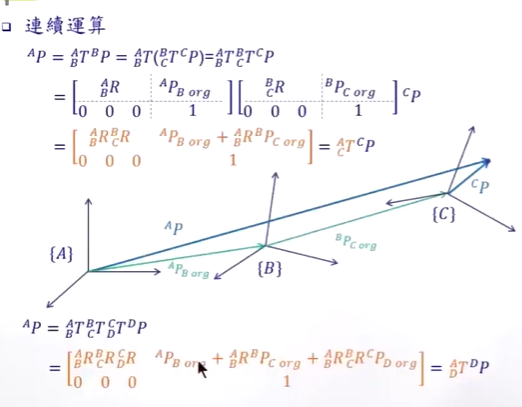
(Pi-1 = T i-1i Pi= R i-1i Pi + VB , 用Mapping来理解,R就是旋转后的坐标基,通过Pi 线性组合成Cp (B系下)向量, Cp + VB就是B系下的向量)
左上 3 x 3就是旋转矩阵,Mapping就是旋转后的坐标轴的向量。
右上 3 x 1就是在 i -1 系下的向量
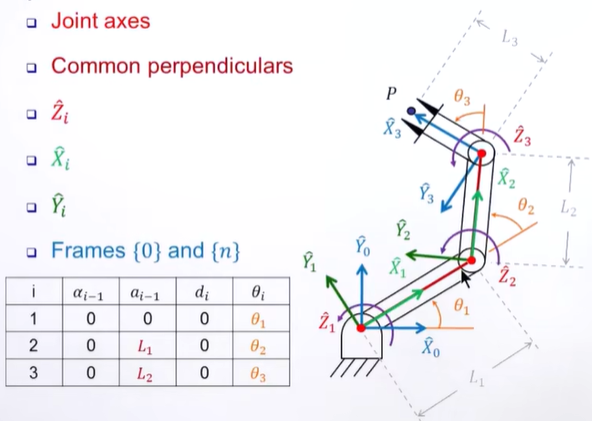
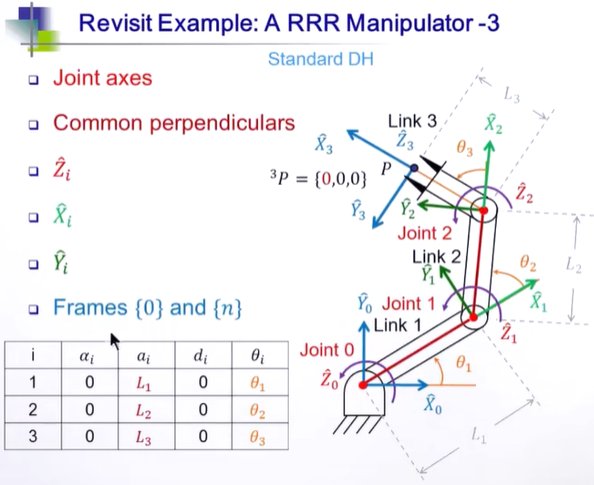
*各个X轴在同一平面内,所以d全为0
*如果是旋转join,那么z就是转轴
*如果是伸缩的join,那么z就是沿伸缩轴
使用这种表达法比较好。
*Linki 是连接 Jioni-1与jioni的。
Xi垂直于Zi-1
*先完成在当前Jion下能完成的所有动作

使用 Standard DH

T01 p1 = R01 p1 + v
R和v合并为T。使用向量来理解, R01 p1 将 1系下的点,转为0系下的向量。
v0系下臂的向量。
思路:Mapping 和向量相加。
Craig和Standard比较


 浙公网安备 33010602011771号
浙公网安备 33010602011771号