

卡尔曼滤波(八)——其他角度理解
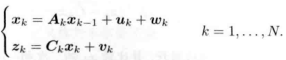
xνk 为第k时刻的【先验】
x^k 为第k时刻的【后验】
uk理解为【常数项】、wk~N(0,R)理解为模【型误差项】、vk~N(0,Q),理解为【观测值误差项】
p(wk) = N(0,R), p(vk) = N(0,Q)
【先验】:就是【状态的猜测】,根据之前的状态,猜测当前的状态。
【后验】:暂时理解为【状态的优化结果】,根据先验、观测值优化得到的结果。
使用贝叶斯公式:非线性优化 - 耀礼士多德 - 博客园 (cnblogs.com)
理解:
( 1 )这是一个模型方程,模型的用法:xνk = Akx^k-1 + uk,等价于:第k时刻的先验 =Ak* 第k-1时刻的后验
( 2 ) 那么,第k时刻的【先验 P( xνk ) 】服从的高斯分布,是均值为 :Akx^k-1 + uk ,【先验协方差】矩阵为:AkP^k-1AkT + R
( 3 )系统的输出,就是 【后验状态x^k 】、以及【后验P^k协方差】,为第 k + 1 次估计服务。
那么,问题就是:
1. 如何得到第 k时刻的【后验状态x^k 】
2. 如何得到第 k时候的【后验P^k协方差】
如果使用贝叶斯公式:
P( x^k | zk) = P( zk | xvk) * P(xvk) / P( zk) , 因为zk 是已经发生的事,认为P( zk) = 1,那么:
P( x^k | zk) = P( zk | xk) * P(xvk),即:后验概率 = 似然 * 先验
*【似然】,怎样的xk , 使得观测值为zk 的概率最大
结合高斯分布:
N(后验状态 , 后验协方差) = N(x^k , P^k) = N(Cxk, Q ) * N(xvk , Pvk)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号