
Linux 进程的 Stop,Park,Freeze
layout: post
title: “Linux 进程的Stop,Park,Freeze”
keywords: [“kthread_stop”,“kthread_park”,“freeze_processes”]
description: “”
categories: “linux”
tags: [“kthread_stop”,“kthread_park”,“freeze_processes”]
author: Peng Weilin
permalink: /linux-process-stop.html
在调试内核的时候,经常会碰到几个相近的概念:进程stop、进程park、进程freeze。这几个名词看起来都是停止进程,那么他们之间的区别和应用场景在分别是什么呢?下面就来分析一番。
本文的代码分析基于linux kernel 3.18.22,最好的学习方法还是"RTFSC"
1.进程stop
进程stop分成两种:用户进程stop和内核进程stop。
用户进程stop可以通过给进程发送STOP信号来实现,可以参考“Linux Signal”这一篇的描述。但是对内核进程来说不会响应信号,如果碰到需要stop内核进程的场景怎么处理?比如:我们在设备打开的时候创建了内核处理进程,在设备关闭的时候需要stop内核进程。
linux实现了一套kthread_stop()的机制来实现内核进程stop。
1.1内核进程的创建
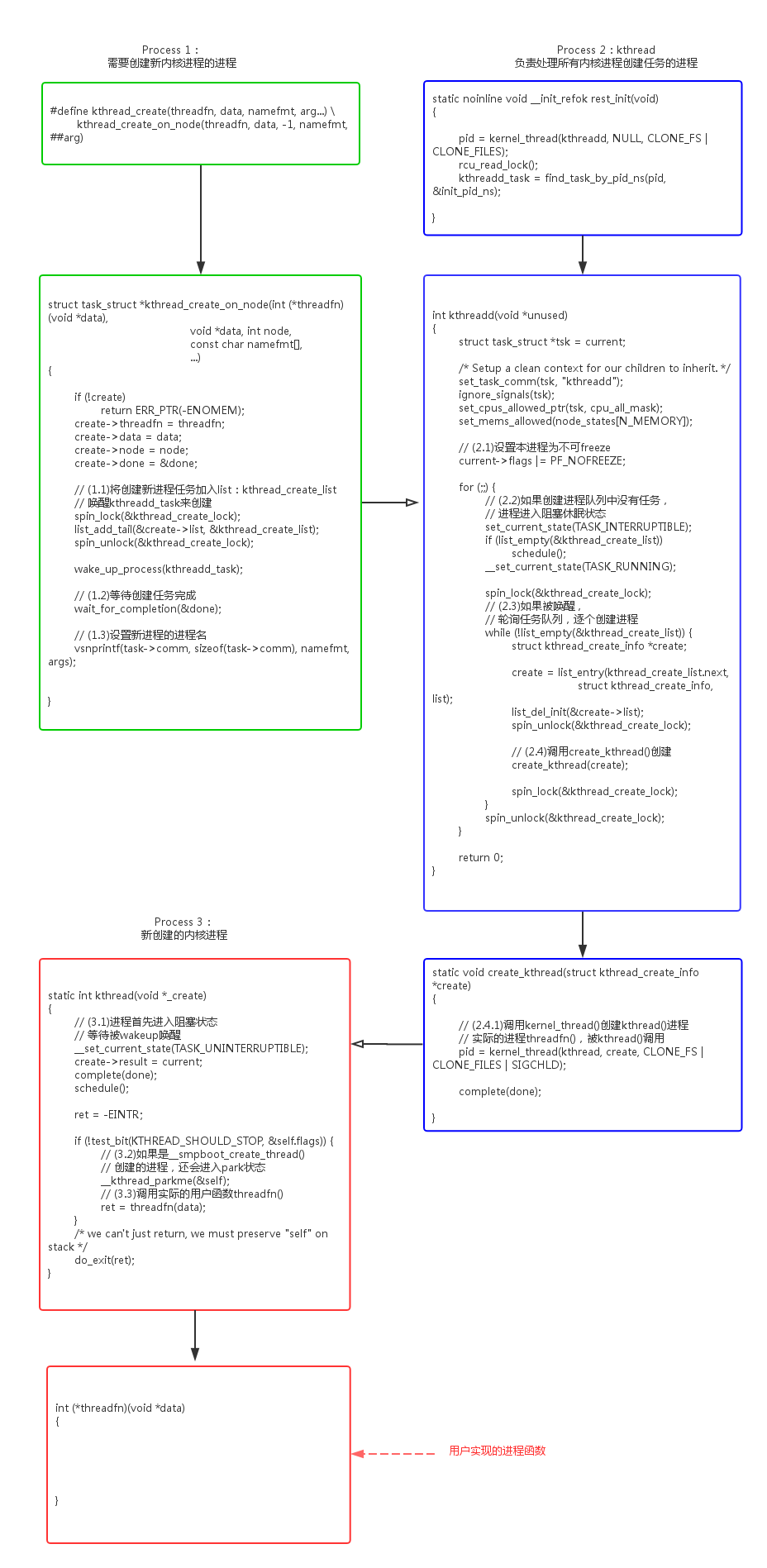
内核进程创建过程,是理解本篇的基础。
可以看到kthread_create()并不是自己去创建内核进程,而是把创建任务推送给kthreadd()进程执行。
kthreadd() -> create_kthread() -> kernel_thread()创建的新进程也不是直接使用用户的函数threadfn(),而是创建通用函数kthread(),kthread()再来调用threadfn()。
- kernel/kthread.c:
1.2内核进程的stop
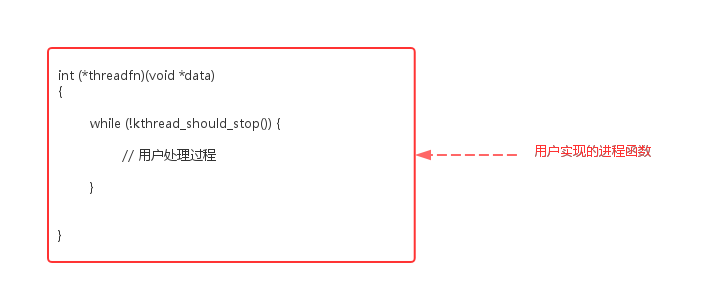
如果内核进程需要支持kthread_stop(),需要根据以下框架来写代码。用户在主循环中调用kthread_should_stop()来判断当前kthread是否需要stop,如果被stop则退出循环退出进程。
这种代码为什么不做到通用代码kthread()中?这应该是和linux的设计思想相关的。linux运行内核态的策略比较灵活,而对用户态的策略更加严格统一。
kthread_should_stop()和kthread_stop()的代码实现:
- kernel/kthread.c:
- kthread_should_stop()/kthread_stop()
bool kthread_should_stop(void)
{
// (1) 判断进程所在kthread结构中的KTHREAD_SHOULD_STOP是否被置位
return test_bit(KTHREAD_SHOULD_STOP, &to_kthread(current)->flags);
}
int kthread_stop(struct task_struct *k)
{
struct kthread *kthread;
int ret;
trace_sched_kthread_stop(k);
get_task_struct(k);
kthread = to_live_kthread(k);
if (kthread) {
// (2) 置位进程所在kthread结构中的KTHREAD_SHOULD_STOP
set_bit(KTHREAD_SHOULD_STOP, &kthread->flags);
// (3) unpark & wake_up 进程来响应stop信号
__kthread_unpark(k, kthread);
wake_up_process(k);
wait_for_completion(&kthread->exited);
}
ret = k->exit_code;
put_task_struct(k);
trace_sched_kthread_stop_ret(ret);
return ret;
}
2.进程park
smpboot_register_percpu_thread()用来创建per_cpu内核进程,所谓的per_cpu进程是指需要在每个online cpu上创建的线程。比如执行stop_machine()多cpu同步操作的migration进程:
shell@:/ $ ps | grep migration
root 10 2 0 0 smpboot_th 0000000000 S migration/0
root 11 2 0 0 smpboot_th 0000000000 S migration/1
root 15 2 0 0 __kthread_ 0000000000 R migration/2
root 19 2 0 0 __kthread_ 0000000000 R migration/3
root 207 2 0 0 __kthread_ 0000000000 R migration/8
root 247 2 0 0 __kthread_ 0000000000 R migration/4
root 251 2 0 0 __kthread_ 0000000000 R migration/5
root 265 2 0 0 __kthread_ 0000000000 R migration/6
root 356 2 0 0 __kthread_ 0000000000 R migration/7
root 2165 2 0 0 __kthread_ 0000000000 R migration/9
问题来了,既然per_cpu进程是和cpu绑定的,那么在cpu hotplug的时候,进程需要相应的disable和enable。实现的方法可以有多种:
- 动态的销毁和创建线程。缺点是开销比较大。
- 设置进程的cpu亲和力set_cpus_allowed_ptr()。缺点是进程绑定的cpu如果被down掉,进程会迁移到其他cpu继续执行。
为了克服上述方案的缺点,适配per_cpu进程的cpu hotplug操作,设计了kthread_park()/kthread_unpark()机制。
2.1 smpboot_register_percpu_thread()
per_cpu进程从代码上看,实际也是调用kthread_create()来创建的。
- kernel/smpboot.c:
- kernel/kthread.c:
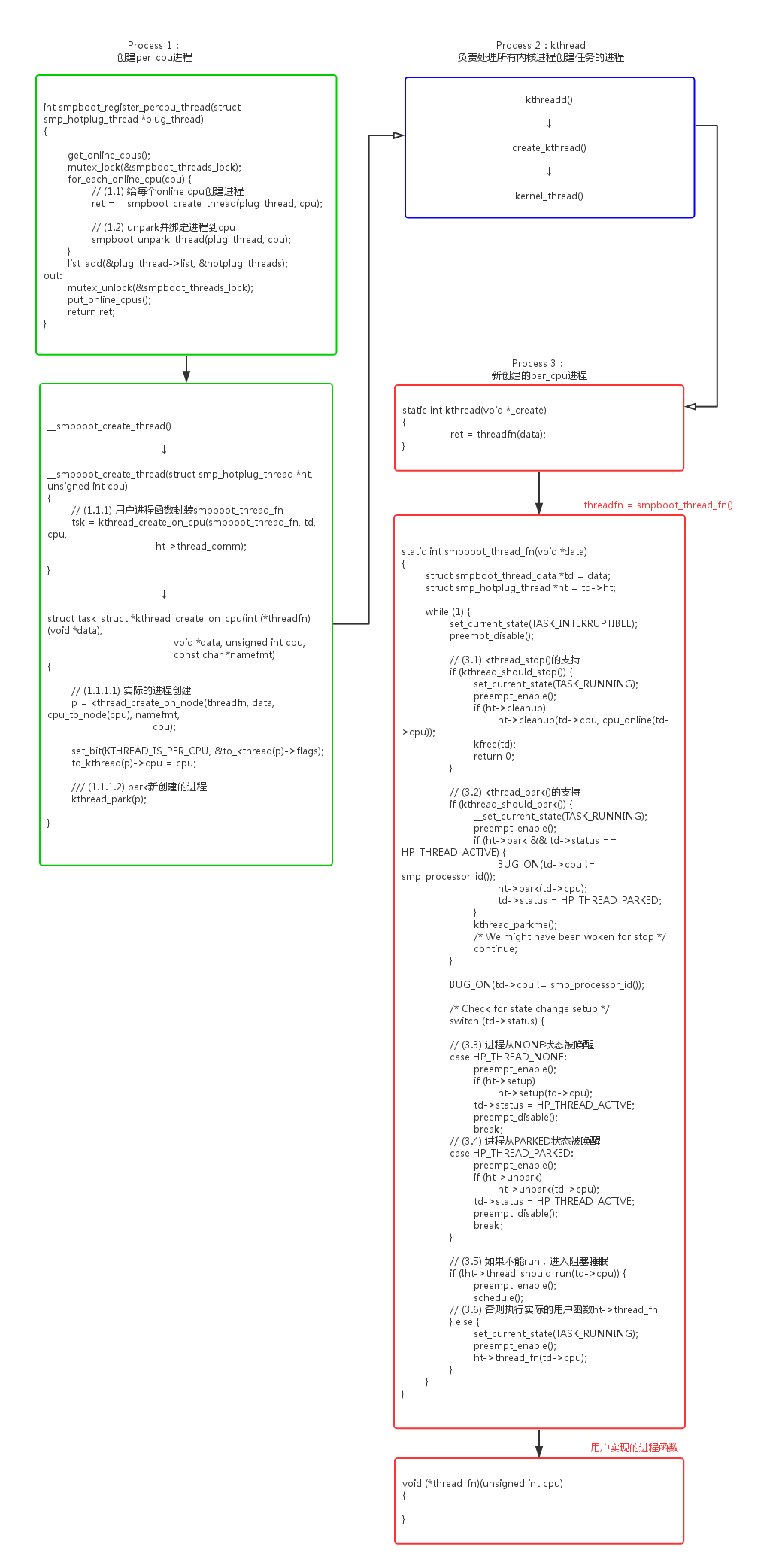
我们可以看到smpboot_register又增加了一层封装:kthread() -> smpboot_thread_fn() -> ht->thread_fn(),这种封装的使用可以参考cpu_stop_threads。
- kernel/stop_machine.c:
static struct smp_hotplug_thread cpu_stop_threads = {
.store = &cpu_stopper_task,
.thread_should_run = cpu_stop_should_run,
.thread_fn = cpu_stopper_thread,
.thread_comm = "migration/%u",
.create = cpu_stop_create,
.setup = cpu_stop_unpark,
.park = cpu_stop_park,
.pre_unpark = cpu_stop_unpark,
.selfparking = true,
};
static int __init cpu_stop_init(void)
{
unsigned int cpu;
for_each_possible_cpu(cpu) {
struct cpu_stopper *stopper = &per_cpu(cpu_stopper, cpu);
spin_lock_init(&stopper->lock);
INIT_LIST_HEAD(&stopper->works);
}
BUG_ON(smpboot_register_percpu_thread(&cpu_stop_threads));
stop_machine_initialized = true;
return 0;
}
我们可以看到smpboot_thread_fn()循环中实现了对park的支持,具体实现kthread_should_park()、kthread_parkme()、kthread_park()、kthread_unpark()的代码分析:
- kernel/kthread.c:
bool kthread_should_park(void)
{
// (1) 判断进程所在kthread结构中的KTHREAD_SHOULD_PARK是否被置位
return test_bit(KTHREAD_SHOULD_PARK, &to_kthread(current)->flags);
}
void kthread_parkme(void)
{
__kthread_parkme(to_kthread(current));
}
| →
static void __kthread_parkme(struct kthread *self)
{
// (2)如果当前进程的KTHREAD_SHOULD_PARK标志被置位,
// 将当前进程进入TASK_PARKED的阻塞状态。
// 如果KTHREAD_SHOULD_PARK不清除,
// 就算被wake_up唤醒还是会循环进入TASK_PARKED的阻塞状态。
__set_current_state(TASK_PARKED);
while (test_bit(KTHREAD_SHOULD_PARK, &self->flags)) {
if (!test_and_set_bit(KTHREAD_IS_PARKED, &self->flags))
complete(&self->parked);
schedule();
__set_current_state(TASK_PARKED);
}
clear_bit(KTHREAD_IS_PARKED, &self->flags);
__set_current_state(TASK_RUNNING);
}
int kthread_park(struct task_struct *k)
{
struct kthread *kthread = to_live_kthread(k);
int ret = -ENOSYS;
if (kthread) {
// (3)设置KTHREAD_IS_PARKED标志位,并且唤醒进程进入park状态
if (!test_bit(KTHREAD_IS_PARKED, &kthread->flags)) {
set_bit(KTHREAD_SHOULD_PARK, &kthread->flags);
if (k != current) {
wake_up_process(k);
wait_for_completion(&kthread->parked);
}
}
ret = 0;
}
return ret;
}
void kthread_unpark(struct task_struct *k)
{
struct kthread *kthread = to_live_kthread(k);
if (kthread)
__kthread_unpark(k, kthread);
}
| →
static void __kthread_unpark(struct task_struct *k, struct kthread *kthread)
{
// (4)清除KTHREAD_IS_PARKED标志位
clear_bit(KTHREAD_SHOULD_PARK, &kthread->flags);
/*
* We clear the IS_PARKED bit here as we don't wait
* until the task has left the park code. So if we'd
* park before that happens we'd see the IS_PARKED bit
* which might be about to be cleared.
*/
// 如果进程已经被park,并且wake_up唤醒进程
if (test_and_clear_bit(KTHREAD_IS_PARKED, &kthread->flags)) {
// 如果是per_cpu进程,重新绑定进程cpu
if (test_bit(KTHREAD_IS_PER_CPU, &kthread->flags))
__kthread_bind(k, kthread->cpu, TASK_PARKED);
wake_up_state(k, TASK_PARKED);
}
}
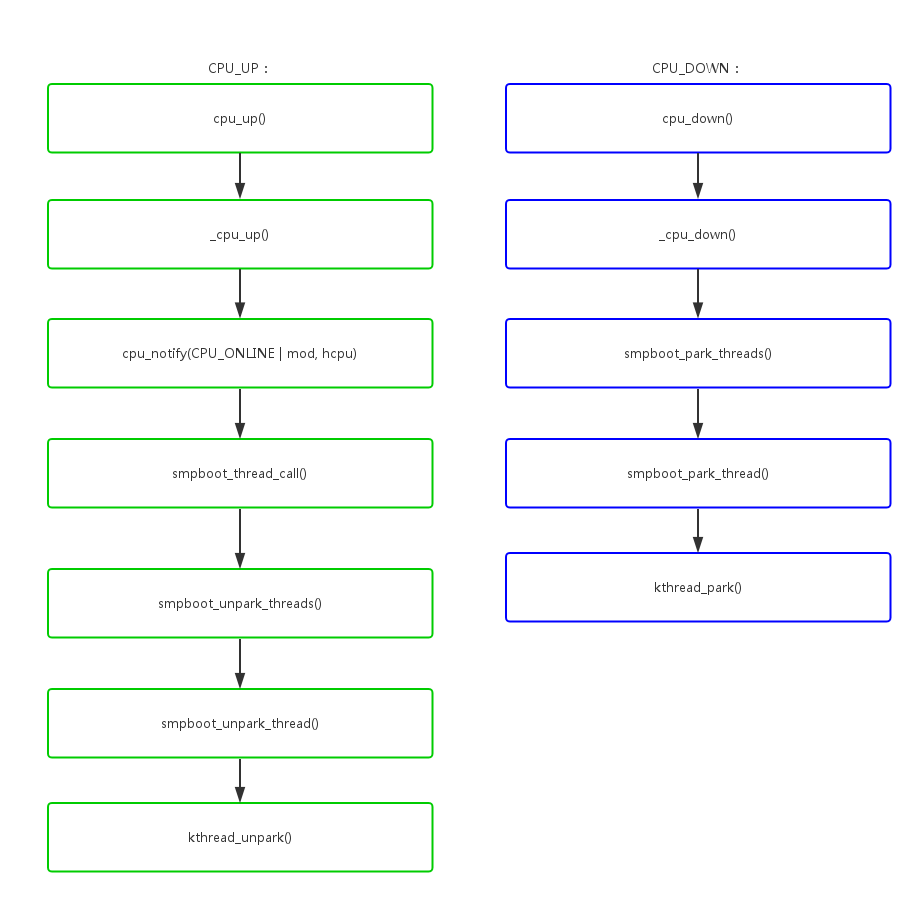
2.2 cpu hotplug支持
我们前面说到park机制的主要目的是为了per_cpu进程支持cpu hotplug,具体怎么响应热插拔事件呢?
- kernel/smpboot.c:
3.进程freeze
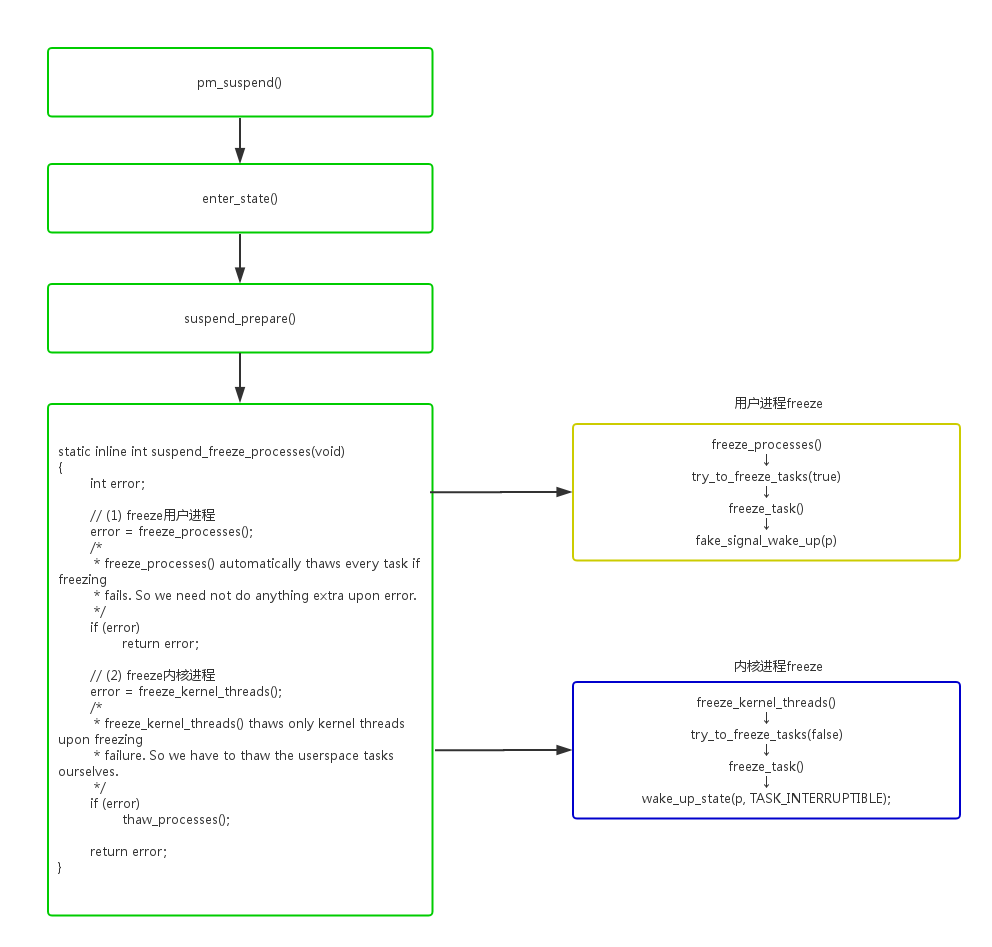
在系统进入suspend的时候,会尝试冻住一些进程,以避免一些进程无关操作影响系统的suspend状态。主要的流程如下:
- kernel/power/suspend.c:
这suspend_freeze里面判断当前在那个阶段,有3个重要的变量:
- system_freezing_cnt。>0表示系统全局的freeze开始;
- pm_freezing。=true表示用户进程freeze开始;
- pm_nosig_freezing。=true表示内核进程freeze开始;
具体代码分析如下:
- kernel/power/process.c:
- kernel/freezer.c:
- suspend_freeze_processes() -> freeze_processes() -> try_to_freeze_tasks() -> freeze_task()
int freeze_processes(void)
{
int error;
int oom_kills_saved;
error = __usermodehelper_disable(UMH_FREEZING);
if (error)
return error;
// (1) 置位PF_SUSPEND_TASK,确保当前进程不会被freeze
/* Make sure this task doesn't get frozen */
current->flags |= PF_SUSPEND_TASK;
// (2) 使用全局freeze标志system_freezing_cnt
if (!pm_freezing)
atomic_inc(&system_freezing_cnt);
pm_wakeup_clear();
printk("Freezing user space processes ... ");
// (3) 使用用户进程freeze标志pm_freezing
pm_freezing = true;
oom_kills_saved = oom_kills_count();
// (4) freeze user_only进程
// 判断进程是否可以被freeze,唤醒进程freeze自己
error = try_to_freeze_tasks(true);
if (!error) {
__usermodehelper_set_disable_depth(UMH_DISABLED);
oom_killer_disable();
/*
* There might have been an OOM kill while we were
* freezing tasks and the killed task might be still
* on the way out so we have to double check for race.
*/
if (oom_kills_count() != oom_kills_saved &&
!check_frozen_processes()) {
__usermodehelper_set_disable_depth(UMH_ENABLED);
printk("OOM in progress.");
error = -EBUSY;
} else {
printk("done.");
}
}
printk("\n");
BUG_ON(in_atomic());
if (error)
thaw_processes();
return error;
}
| →
static int try_to_freeze_tasks(bool user_only)
{
struct task_struct *g, *p;
unsigned long end_time;
unsigned int todo;
bool wq_busy = false;
struct timeval start, end;
u64 elapsed_msecs64;
unsigned int elapsed_msecs;
bool wakeup = false;
int sleep_usecs = USEC_PER_MSEC;
#ifdef CONFIG_PM_SLEEP
char suspend_abort[MAX_SUSPEND_ABORT_LEN];
#endif
do_gettimeofday(&start);
end_time = jiffies + msecs_to_jiffies(freeze_timeout_msecs);
// (4.1) 如果是kernel freeze,
// 停工有WQ_FREEZABLE标志的workqueue
// 将wq的pwq->max_active设置成0,新的work不能被执行
if (!user_only)
freeze_workqueues_begin();
while (true) {
todo = 0;
read_lock(&tasklist_lock);
// (4.2) 对每个进程执行freeze_task()
for_each_process_thread(g, p) {
if (p == current || !freeze_task(p))
continue;
if (!freezer_should_skip(p))
todo++;
}
read_unlock(&tasklist_lock);
// (4.3) 如果是kernel freeze,
// 判断停工的workqueue中残留的work有没有执行完
if (!user_only) {
wq_busy = freeze_workqueues_busy();
todo += wq_busy;
}
if (!todo || time_after(jiffies, end_time))
break;
if (pm_wakeup_pending()) {
#ifdef CONFIG_PM_SLEEP
pm_get_active_wakeup_sources(suspend_abort,
MAX_SUSPEND_ABORT_LEN);
log_suspend_abort_reason(suspend_abort);
#endif
wakeup = true;
break;
}
/*
* We need to retry, but first give the freezing tasks some
* time to enter the refrigerator. Start with an initial
* 1 ms sleep followed by exponential backoff until 8 ms.
*/
usleep_range(sleep_usecs / 2, sleep_usecs);
if (sleep_usecs < 8 * USEC_PER_MSEC)
sleep_usecs *= 2;
}
do_gettimeofday(&end);
elapsed_msecs64 = timeval_to_ns(&end) - timeval_to_ns(&start);
do_div(elapsed_msecs64, NSEC_PER_MSEC);
elapsed_msecs = elapsed_msecs64;
if (wakeup) {
printk("\n");
printk(KERN_ERR "Freezing of tasks aborted after %d.%03d seconds",
elapsed_msecs / 1000, elapsed_msecs % 1000);
} else if (todo) {
printk("\n");
printk(KERN_ERR "Freezing of tasks failed after %d.%03d seconds"
" (%d tasks refusing to freeze, wq_busy=%d):\n",
elapsed_msecs / 1000, elapsed_msecs % 1000,
todo - wq_busy, wq_busy);
read_lock(&tasklist_lock);
for_each_process_thread(g, p) {
if (p != current && !freezer_should_skip(p)
&& freezing(p) && !frozen(p))
sched_show_task(p);
}
read_unlock(&tasklist_lock);
} else {
printk("(elapsed %d.%03d seconds) ", elapsed_msecs / 1000,
elapsed_msecs % 1000);
}
return todo ? -EBUSY : 0;
}
|| →
bool freeze_task(struct task_struct *p)
{
unsigned long flags;
/*
* This check can race with freezer_do_not_count, but worst case that
* will result in an extra wakeup being sent to the task. It does not
* race with freezer_count(), the barriers in freezer_count() and
* freezer_should_skip() ensure that either freezer_count() sees
* freezing == true in try_to_freeze() and freezes, or
* freezer_should_skip() sees !PF_FREEZE_SKIP and freezes the task
* normally.
*/
if (freezer_should_skip(p))
return false;
spin_lock_irqsave(&freezer_lock, flags);
// (4.2.1) 检查当前进程是否可以被freeze,
// 或者是否已经被freeze
if (!freezing(p) || frozen(p)) {
spin_unlock_irqrestore(&freezer_lock, flags);
return false;
}
// (4.2.2) 如果是用户进程,伪造一个signal发送给进程
if (!(p->flags & PF_KTHREAD))
fake_signal_wake_up(p);
// (4.2.3) 如果是内核进程,wake_up内核进程
else
wake_up_state(p, TASK_INTERRUPTIBLE);
spin_unlock_irqrestore(&freezer_lock, flags);
return true;
}
||| →
static inline bool freezing(struct task_struct *p)
{具体代码分析如下:
- kernel/power/process.c:
- kernel/freezer.c:
// 如果system_freezing_cnt为0,说明全局freeze还没有开始
if (likely(!atomic_read(&system_freezing_cnt)))
return false;
return freezing_slow_path(p);
}
|||| →
bool freezing_slow_path(struct task_struct *p)
{
// (PF_NOFREEZE | PF_SUSPEND_TASK)当前进程不能被freeze
if (p->flags & (PF_NOFREEZE | PF_SUSPEND_TASK))
return false;
if (test_thread_flag(TIF_MEMDIE))
return false;
// 如果pm_nosig_freezing为true,内核进程freeze已经开始,
// 当前进程可以被freeze
if (pm_nosig_freezing || cgroup_freezing(p))
return true;
// 如果pm_freezing为true,且当前进程为用户进程
// 当前进程可以被freeze
if (pm_freezing && !(p->flags & PF_KTHREAD))
return true;
return false;
}
3.1 用户进程freeze
freeze用户态的进程利用了signal机制,系统suspend使能了suspend以后,调用fake_signal_wake_up()伪造一个信号唤醒进程,进程在ret_to_user() -> do_notify_resume() -> do_signal() -> get_signal() -> try_to_freeze()中freeze自己。
具体代码分析如下:
- kernel/freezer.c:
static inline bool try_to_freeze(void)
{
if (!(current->flags & PF_NOFREEZE))
debug_check_no_locks_held();
return try_to_freeze_unsafe();
}
| →
static inline bool try_to_freeze_unsafe(void)
{
might_sleep();
// 当前进程是否可以被freeze
if (likely(!freezing(current)))
return false;
// 调用__refrigerator() freeze当前进程
return __refrigerator(false);
}
|| →
bool __refrigerator(bool check_kthr_stop)
{
/* Hmm, should we be allowed to suspend when there are realtime
processes around? */
bool was_frozen = false;
long save = current->state;
pr_debug("%s entered refrigerator\n", current->comm);
for (;;) {
// (1) 设置当前进程进入TASK_UNINTERRUPTIBLE阻塞状态
set_current_state(TASK_UNINTERRUPTIBLE);
spin_lock_irq(&freezer_lock);
// (2) 设置已经freeze标志PF_FROZEN
current->flags |= PF_FROZEN;
// (3) 如果当前进程已经不是freeze状态,
// 退出freeze
if (!freezing(current) ||
(check_kthr_stop && kthread_should_stop()))
current->flags &= ~PF_FROZEN;
spin_unlock_irq(&freezer_lock);
if (!(current->flags & PF_FROZEN))
break;
was_frozen = true;
schedule();
}
pr_debug("%s left refrigerator\n", current->comm);
/*
* Restore saved task state before returning. The mb'd version
* needs to be used; otherwise, it might silently break
* synchronization which depends on ordered task state change.
*/
set_current_state(save);
return was_frozen;
}
3.2 内核进程freeze
内核进程对freeze的响应,有两个问题:
- wake_up_state(p, TASK_INTERRUPTIBLE)能唤醒哪些内核进程。
- 内核进程怎么样来响应freeze状态,怎么样来freeze自己。
如果进程阻塞在信号量、mutex等内核同步机制上,wake_up_state并不能解除阻塞。因为这些机制都有while(1)循环来判断条件,是否成立,不成立只是简单的唤醒随即又会进入阻塞睡眠状态。
- kernel/locking/mutex.c:
- mutex_lock() -> __mutex_lock_common()
__mutex_lock_common(struct mutex *lock, long state, unsigned int subclass,
struct lockdep_map *nest_lock, unsigned long ip,
struct ww_acquire_ctx *ww_ctx, const bool use_ww_ctx)
{
for (;;) {
/*
* Lets try to take the lock again - this is needed even if
* we get here for the first time (shortly after failing to
* acquire the lock), to make sure that we get a wakeup once
* it's unlocked. Later on, if we sleep, this is the
* operation that gives us the lock. We xchg it to -1, so
* that when we release the lock, we properly wake up the
* other waiters. We only attempt the xchg if the count is
* non-negative in order to avoid unnecessary xchg operations:
*/
// (1) 如果mutex_lock条件成立,才退出
if (atomic_read(&lock->count) >= 0 &&
(atomic_xchg(&lock->count, -1) == 1))
break;
// (2) 如果如果有信号阻塞,也退出
/*
* got a signal? (This code gets eliminated in the
* TASK_UNINTERRUPTIBLE case.)
*/
if (unlikely(signal_pending_state(state, task))) {
ret = -EINTR;
goto err;
}
if (use_ww_ctx && ww_ctx->acquired > 0) {
ret = __mutex_lock_check_stamp(lock, ww_ctx);
if (ret)
goto err;
}
// (3) 否则继续进入阻塞休眠状态
__set_task_state(task, state);
/* didn't get the lock, go to sleep: */
spin_unlock_mutex(&lock->wait_lock, flags);
schedule_preempt_disabled();
spin_lock_mutex(&lock->wait_lock, flags);
}
}
所以wake_up_state()只能唤醒这种简单阻塞的内核进程,而对于阻塞在内核同步机制上是无能无力的:
void user_thread()
{
while(1)
{
set_current_state(TASK_UNINTERRUPTIBLE);
schedule();
}
}
内核进程响应freeze操作,也必须显式的调用try_to_freeze()或者kthread_freezable_should_stop()来freeze自己:
void user_thread()
{
while (!kthread_should_stop()) {
try_to_freeze();
}
}
所以从代码逻辑上看内核进程freeze,并不会freeze所有内核进程,只freeze了2部分:一部分是设置了WQ_FREEZABLE标志的workqueue,另一部分是内核进程主动调用try_to_freeze()并且在架构上设计的可以响应freeze。
参考资料
本文来自博客园,作者:pwl999,转载请注明原文链接:https://www.cnblogs.com/pwl999/p/15534955.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号