[平衡小车](一)硬件原理图详解
硬件
物料
| 硬件 | 模块 | 用途 | 物料 | 图片正面 | 图片反面 |
|---|---|---|---|---|---|
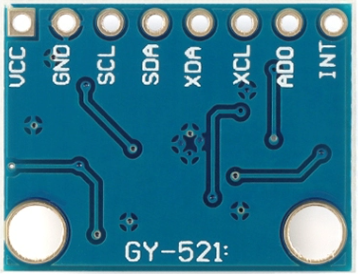
| 陀螺仪 | MPU-6050模块(三轴陀螺仪 + 三轴加速度) | 检测倾斜角度 | https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-24706531953.13.70286a4bhppX4E&id=522575310310 | 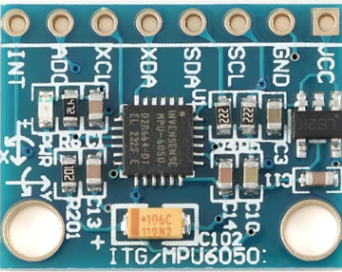 |
 |
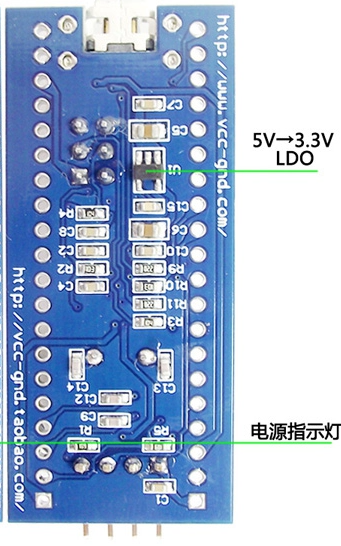
| 主控 | STM32F103C8T6最小系统板 | 主控制器 | https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-24706531953.9.552c6a4bhTnUpc&id=679227834271 | 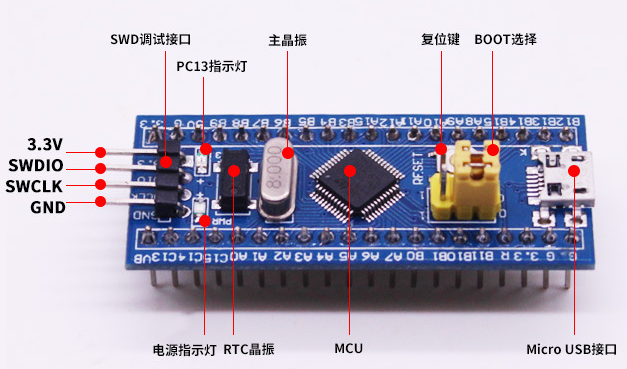 |
 |
| 车架 | 平衡车底盘、电机、轮子 | 小车框架 | https://item.taobao.com/item.htm?spm=a1z09.2.0.0.501c2e8dye4wZ4&id=45470143481&_u=b2ouakve30c8 |  |
|
| 电池 | 3S航模锂电池 | 12v供电 | https://item.taobao.com/item.htm?spm=a1z09.2.0.0.501c2e8dye4wZ4&id=583626217798&_u=b2ouakve1e18 |  |
|
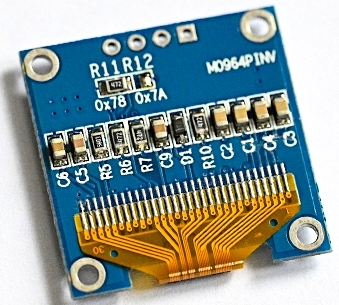
| OLED | 4线I2C 0.96寸OLED显示屏 | 调试 | https://item.taobao.com/item.htm?spm=a1z10.5-c-s.w4002-24376215607.28.23586191zF6HKn&id=560304424838 | 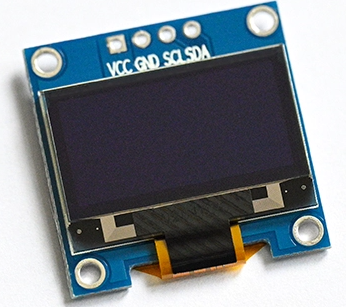 |
 |
| 电机驱动 | DRV8848两路直流电机驱动 | 5V转3.3V, 驱动电机,包含DC-DC | https://item.taobao.com/item.htm?spm=a1z09.2.0.0.501c2e8dye4wZ4&id=622857070622&_u=b2ouakve7b55 | 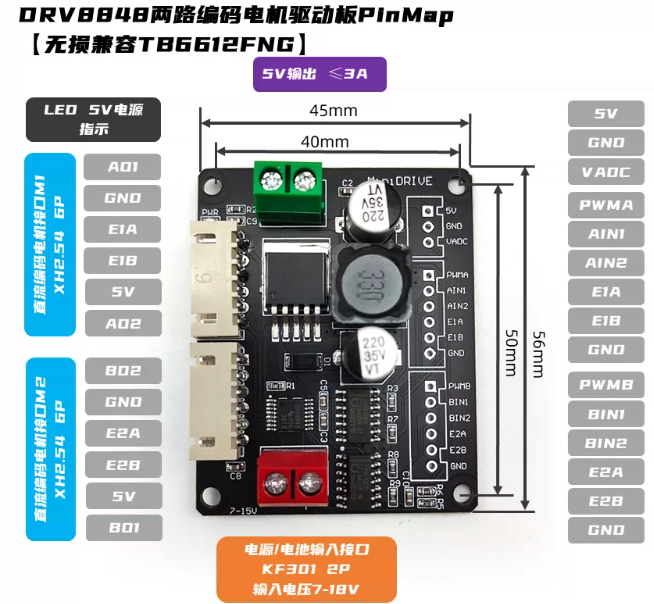 |
|
| 电机 | 13线霍尔编码器的直流减速电机 | GM25-370 | https://item.taobao.com/item.htm?spm=a1z09.2.0.0.501c2e8dye4wZ4&id=45470143481&_u=b2ouakve30c8 | 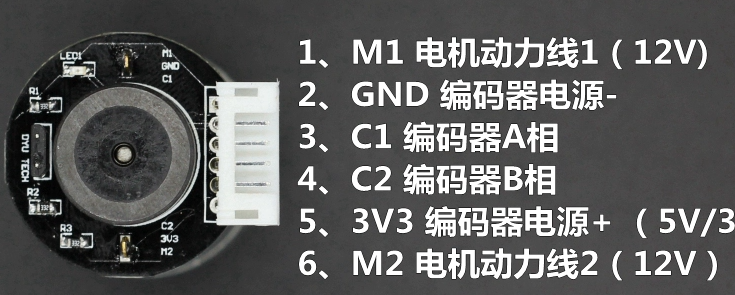 |
原理图
电机驱动以及编码器
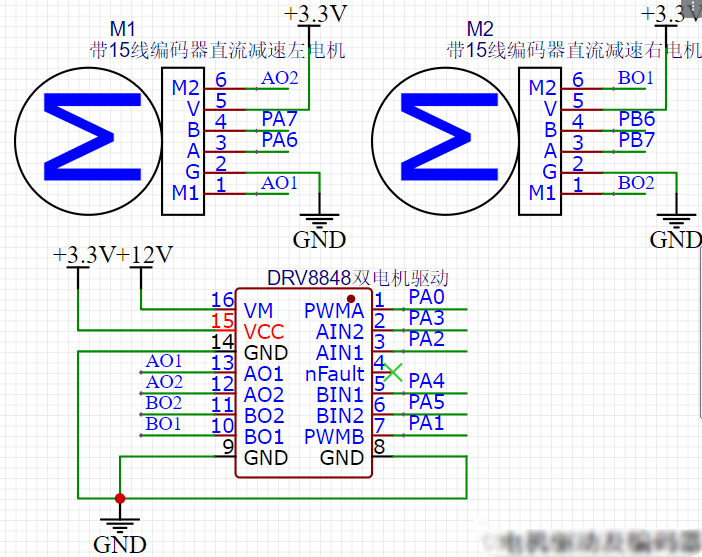
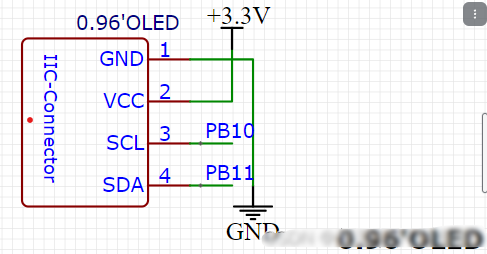
4线OLED
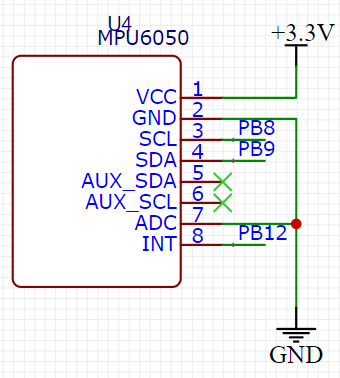
MPU6050
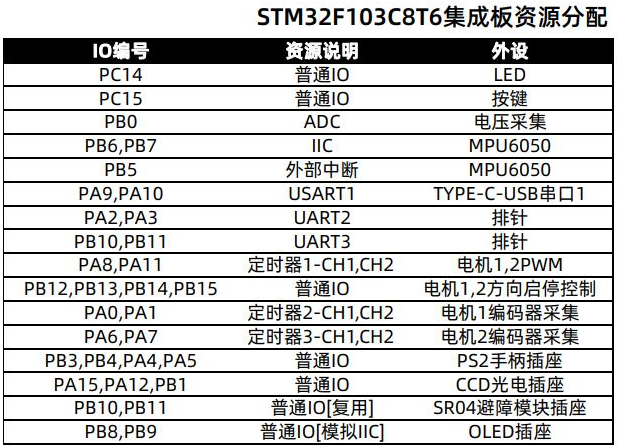
引脚分配
接线图
mpu
软件IIC
SCL PB10
SDA PB11
按键 PA12
PWMA PA8
AIN1 PB12
AIN2 PB13
E1A PA0
E1B PA1
PWMB PA11
BIN1 PB14
BIN2 PB15
E2A PA6
E2B PA7
PA6 PA7
PA0 PA1
定时器初始化配置
实物展示

- 硬件框架选择
- 软件编程
- PID算法
- PID调参

 浙公网安备 33010602011771号
浙公网安备 33010602011771号