[Решение] 瑰丽华尔兹
![[Решение] 瑰丽华尔兹](https://img2023.cnblogs.com/blog/3278762/202309/3278762-20230924143151924-315387737.png) this is the solution to luogu P2254.
this is the solution to luogu P2254.
这个人思维和记忆一样差,所以写的更冗长,并且目的是备忘。
原题
\(N \cdot M\) 的地图,有若干障碍物,指定 \(K\) 个时间段内只能向指定方向走,单位时间走单位距离或选择不动,问最长路。
入题
从最朴素的角度切入,如果我们使用搜索,枚举所有可能性,自然会产生指数级的状态,且大部分都不优——求最值并不需要劣状态。
考虑缩减状态至多项式级,这是搜索向记忆化,即动态规划转变的标志。
不难想到转移方法:
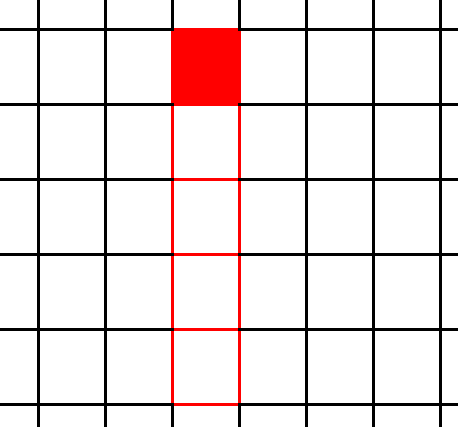
红色填充的格子当前的最长路,可以从包括自身的所有上一个时间段内的格子的最长路(红色边框)转移而来。
若 \((a,b)\) 在指定方向反面,指定时间段 \(k\) 内可以抵达且之间没有障碍物,即:
\[dp(i,j)=\max\limits_{(a,b) \in period(k)} dp(a,b)+distance((i,j),(a,b))
\]
时间复杂度: \(\mathcal O(KNM(N+M))\)
状态数: \(\mathcal O(KNM)\)
空间复杂度可以通过 顺次 处理第 \(k\) 个时间段压缩 \(K\), 为 \(\mathcal O(NM)\)。
其实就是滚动的思想。
优化
转移的时间复杂度是 \(\mathcal O(N+M)\),不够有效率。
考虑转移是有顺序的,是定向依次转移,并且可转移区间大小指定,考虑滑动窗口-单调队列优化。
时间复杂度: \(\mathcal O(KNM)\)
状态数: \(\mathcal O(KNM)\)
代码与细节
#define rep(i,j,k) for(ri i=(j);i<=(k);i++)
#define Wh while
#define re register
#define cn const
#define ri re int
cn int N = 225;
cn int dx[5]={0,-1,1,0,0},
dy[5]={0,0,0,-1,1};
//方向增量
int n,m,cx,cy,k;
//地图大小 起始位置 时间段数
char s[N][N];
//地图
int dp[N][N];
//递推数组
int fr,ed,ans;
//单调队列的起始 答案
struct ele {
int v,p;
}q[N];
//单调队列
void Proc(int x,int y,int tim,int d) {
fr=1,ed=0;
//初始化
for(ri i=1;x&&x<=n&&y&&y<=m;++i,x+=dx[d],y+=dy[d]) {
//i 记录相对位置
if(s[x][y]=='x') fr=1,ed=0;//有障碍物:之前的状态都不可能转移到后面来
else {
Wh(fr<=ed&&q[ed].v+i-q[ed].p<dp[x][y]) --ed;//维护的的比较方式就是单调队列排序的方式
Wh(fr<=ed&&i-q[fr].p>tim) ++fr;//去除时间段外的状态
q[++ed]={dp[x][y],i};
//在更新前加入很重要。若队首非自身,而自身转移后再入队,那么从自身转移就和从队首转移相同。
//若干迭代后,若队首在时间段外,而自身仍在内,此时从自身转移相当于从队首转移,而这不合法,错误。
//本质上是从第k个时间段转移到同时间段的结果,而实际上应当从第k-1个时间段转移。
dp[x][y]=q[fr].v+i-q[fr].p;//转移。如果队首不是自身,那队首一定更优,符合单调性;否则得到原来的值。
ans=std::max(ans,dp[x][y]);//统计答案
}
}
}
signed main() {
read(n,m,cx,cy,k);
rep(i,1,n) std::cin>>s[i]+1;
memset(dp,128,sizeof dp);
//设置为 -INF
dp[cx][cy]=0;
//确保只有起始点能出发
ri x,y,z,tim;
rep(i,1,k) {
read(x,y,z);
//读入区间信息
tim=y-x+1;
if(z==1) rep(j,1,m) Proc(n,j,tim,z);
else if(z==2) rep(j,1,m) Proc(1,j,tim,z);
else if(z==3) rep(j,1,n) Proc(j,m,tim,z);
else rep(j,1,n) Proc(j,1,tim,z);//从边界开始依次更新
}
std::cout<<ans;
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号