matlab model integration
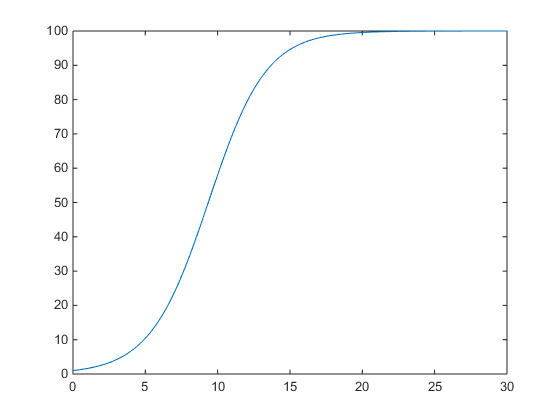
% simple model
clc;clear;close all
mu=0.5;k=100;
n0=1;
tend=30;
dt=0.1;
t=0:dt:tend;
nt=fix(tend/dt);
n=zeros(size(t));
n(1)=n0;
for i=1:length(t)-1
dndt=mu*(1-n(i)/k)*n(i);
n(i+1)=n(i)+dndt*dt;
end
plot(t,n)
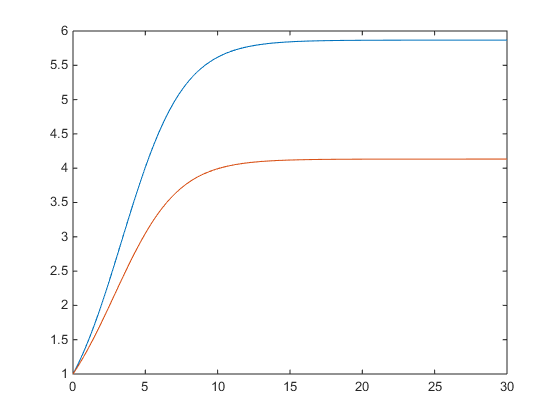
% model2
clc;clear;close all
mu1=0.5;s1=0.05;
mu2=0.4;s2=0.04;
n0=1;m0=1;
tend=30;dt=0.1;t=0:dt:tend;
nt=fix(tend/dt);
n=zeros(size(t));m=n;
n(1)=n0;m(1)=m0;
for i=1:length(t)-1
dndt=(mu1-s1*(n(i)+m(i)))*n(i);
dmdt=(mu2-s2*(n(i)+m(i)))*m(i);
n(i+1)=n(i)+dndt*dt;
m(i+1)=m(i)+dmdt*dt;
end
plot(t,n,t,m)
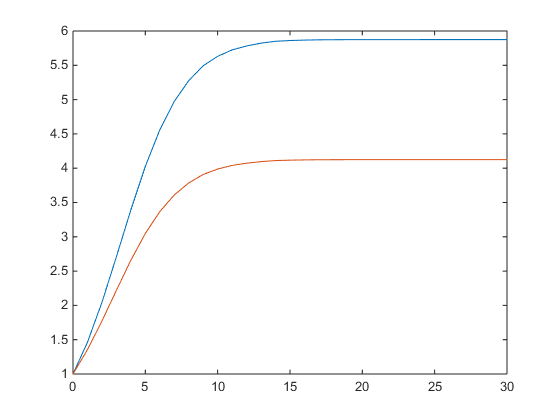
% 2-3rd RK method:ode23 % 4-5th RK method:ode45 function dydt = modfun(t,y) dydt =zeros(2,1); mu1=0.5;s1=0.05; mu2=0.4;s2=0.04; dydt(1)=(mu1-s1*(y(1)+y(2)))*y(1); dydt(2)=(mu2-s2*(y(1)+y(2)))*y(2);
>> y0=[1,1]; >> [t,y]=ode23(@modfun,[0:30],y0);
>> plot(t,y)
function dpdt = modfun(t,p) dpdt =zeros(2,1); fr=3.e13;pr=1.5;fx=60.e13; v1=3.e16;v2=1.e18; sed=0.01*fx*p(1); dpdt(1)=(fr*pr-fx*p(1)+fx*p(2))/v1; dpdt(2)=(fx*p(1)-fx*p(2)-sed)/v2;
>> p0=[0,0] >> [t,p]=ode23(@modfun,[0:1.e6],p0); >> plot(t,p)
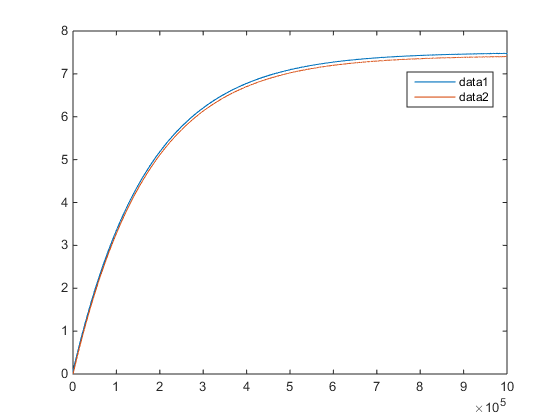
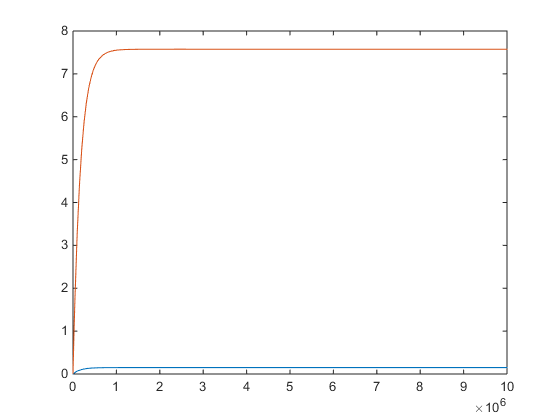
function dpdt = modfun(t,p) dpdt =zeros(2,1); fr=3.e13;pr=1.5;fx=60.e13; v1=3.e16;v2=1.e18;tuo=1; produc=p(1)*v1/tuo; dpdt(1)=(fr*pr-fx*p(1)+fx*p(2)-produc)/v1; dpdt(2)=(fx*p(1)-fx*p(2)+0.99*produc)/v2;
>> [t,y]=ode23(@modfun,[0,1.e7],p0); >> [t,y]=ode15s(@modfun,[0,1.e7],p); >> plot(t,y)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号