

多阈值otsu的opencv实现
#include <iostream> #include<opencv2/opencv.hpp> #include<opencv2/photo.hpp> using namespace cv; using namespace std; void inpaint_test() { Mat img=imread("D:/Qt/MyImage/jingsai_1.jpg",0); imshow("original image",img); Mat mask=Mat::zeros(img.rows,img.cols,img.type()); mask(Rect(377,228,(438-377),(269-228)))=1; Mat img_c; cv::inpaint(img,mask,img_c,3,INPAINT_TELEA); imshow("clear image",img_c); waitKey(); } Mat getHist(const Mat &img)//img必须是单通道图像,img的概率直方图 { if(img.channels()!=1) { cout<<"channels of input image !=1"<<endl; exit(1) ; } int L=256;//灰度级数 Mat hist(1,L,CV_64F,Scalar::all(0)); int v=0; for(int i=0;i<img.rows;i++) for(int j=0;j<img.cols;j++) { v=img.ptr<uchar>(i)[j]; hist.ptr<double>(0)[v]+=1; } return hist; } //计算累积概率分布函数,Mat &pi是概率分布,本函数可以指定某一灰度范围内(k1~k2)的累积概率 double getLocAccHist(const Mat&pi,int k1,int k2) { double P=0; for(int k=k1;k<=k2;k++) { P +=pi.ptr<double>(0)[k]; } return P; } Mat getMeanPerGrayLevel(const Mat& pi)//计算每个灰度级上的像素均值 { int L=256; Mat ipi(pi.size(),pi.type(),Scalar::all(0)); // m1k.ptr<double>(0)[0]=pi.ptr<double>(0)[0]*0; for(int k=1;k<L;k++) { ipi.ptr<double>(0)[k]=ipi.ptr<double>(0)[(k-1)]+pi.ptr<double>(0)[k]*k; } return ipi; } /*计算某一灰度级范围内的所有像素灰度均值,下面是参数说明 k1:灰度级小端;k2:灰度级大端; hist_img:原图像的直方图 */ double getMeanvalueOfC(int k1,int k2,const Mat&hist_img) { int pixTotalNum=0; double pixTotalValue=0; double mk1k2=0; for(int k=k1;k<=k2;k++) { pixTotalNum +=hist_img.ptr<double>(0)[k];//计算k1与k2之间所有像素的个数 //计算k1与k2之间所有像素的灰度值之和 pixTotalValue +=k*hist_img.ptr<double>(0)[k]; } if(pixTotalNum!=0) mk1k2=pixTotalValue/pixTotalNum; return mk1k2; } void getOstu2Threshvalue(const Mat&img,int &k11,int &k22) { Mat hist_img=getHist(img); Mat pi=hist_img/(img.rows*img.cols);//1.灰度级概率分布 //3.全局均值、全局方差 Scalar means,stddev; meanStdDev(img,means,stddev); double mG=means[0]; //5.计算m1,第一类C1中的像素灰度均值 int L=256; double SigmaB2=0; for(int k1=1;k1<L-2;k1++) { for(int k2=k1+1;k2<L-1;k2++) { //6.计算mk,第一类C2中的像素灰度均值 double m1=getMeanvalueOfC(0,k1,hist_img); double m2=getMeanvalueOfC(k1+1,k2,hist_img); double m3=getMeanvalueOfC(k2+1,L-1,hist_img); // double P1=getLocAccHist(pi,0,k1); double P2=getLocAccHist(pi,k1+1,k2); double P3=getLocAccHist(pi,k2+1,L-1); //7.计算类间方差SigmaB2 double temp=saturate_cast<double>(P1*(m1-mG)*(m1-mG) +P2*(m2-mG)*(m2-mG) +P3*(m3-mG)*(m3-mG)); if(SigmaB2<temp) { SigmaB2=temp; k11=k1; k22=k2; } } } } Mat myThreshHold(const Mat&img,int k1,int k2,int v1=0,int v2=90,int v3=255) { Mat dst(img.size(),img.type(),Scalar::all(0)); for(int i=0;i<img.rows;i++) for(int j=0;j<img.cols;j++) { int v=img.ptr<uchar>(i)[j]; if(v<=k1) dst.ptr<uchar>(i)[j]=v1; else if(v<=k2) dst.ptr<uchar>(i)[j]=v2; else dst.ptr<uchar>(i)[j]=v3; } return dst; } int main() { Mat img=imread("D:/Qt/MyImage/ch10/Fig1043(a)(yeast_USC).tif",0); // GaussianBlur(img,img,Size(7,7),0); // Mat kernel=(Mat_<int>(3,3)<<-1,-1,-1, // -1,9,-1, // -1,-1,-1); // filter2D(img,img,CV_8U,kernel); imshow("original image",img); int k11,k22; getOstu2Threshvalue(img,k11,k22); Mat dst=myThreshHold(img,k11,k22); imshow("binary image",dst); waitKey(); return 0; }
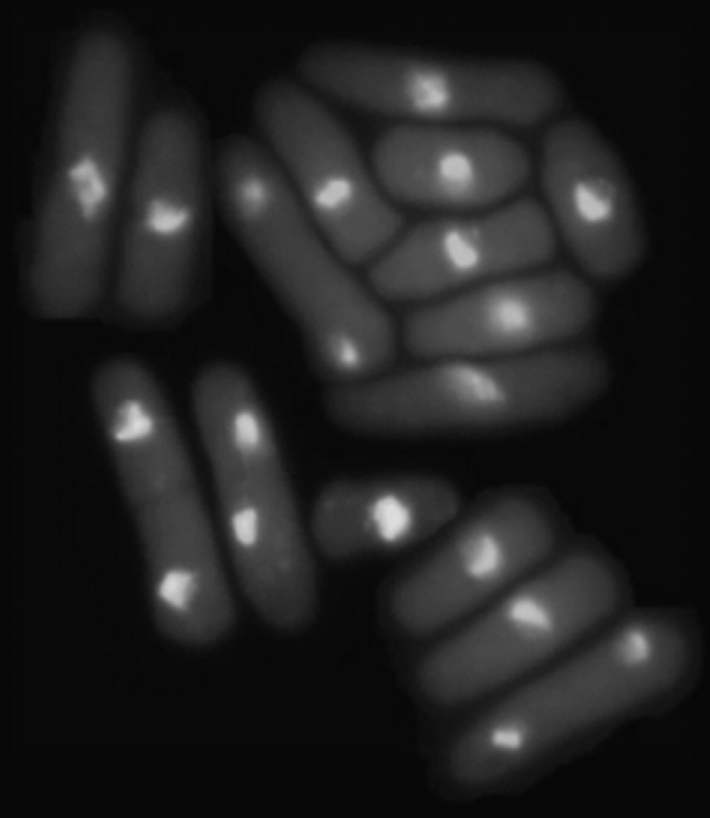
下面左边是原图像,右边是双阈值ostu分割后的图像


 浙公网安备 33010602011771号
浙公网安备 33010602011771号