OCS2::legged_robot::FrictionConeConstraint摩擦锥约束
公式:
\(h(F) = u(F_z + F_{gripper}) - \sqrt{F^2_x + F^2_y + \epsilon} >= 0\)
- \(F_{gripper}\):抓力(如果有)
- \(\epsilon\):正则化参数,用于避免梯度计算时分母为0
vector_t FrictionConeConstraint::getValue(scalar_t time, const vector_t& state, const vector_t& input,
const PreComputation& preComp) const
{
//从input中找出力
const auto forcesInWorldFrame = centroidal_model::getContactForces(input, contactPointIndex_, info_);
//转换坐标
const vector3_t localForce = t_R_w * forcesInWorldFrame;
//返回h(F)的值
return coneConstraint(localForce);
}
VectorFunctionLinearApproximation FrictionConeConstraint::getLinearApproximation(scalar_t time, const vector_t& state,
const vector_t& input,
const PreComputation& preComp) const {
const vector3_t forcesInWorldFrame = centroidal_model::getContactForces(input, contactPointIndex_, info_);
const vector3_t localForce = t_R_w * forcesInWorldFrame;
//F_local对u求导,F_local = T * u,求导后是T
const auto localForceDerivatives = computeLocalForceDerivatives(forcesInWorldFrame);
//h(F)对F_local求导
const auto coneLocalDerivatives = computeConeLocalDerivatives(localForce);
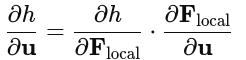
//h(F)对u求导
const auto coneDerivatives = computeConeConstraintDerivatives(coneLocalDerivatives, localForceDerivatives);
VectorFunctionLinearApproximation linearApproximation;
//h(F)的值和导数
linearApproximation.f = coneConstraint(localForce);
linearApproximation.dfdx = matrix_t::Zero(1, state.size());
linearApproximation.dfdu = frictionConeInputDerivative(input.size(), coneDerivatives);
return linearApproximation;
}
df/du
FrictionConeConstraint::LocalForceDerivatives FrictionConeConstraint::computeLocalForceDerivatives(
const vector3_t& forcesInWorldFrame) const {
LocalForceDerivatives localForceDerivatives{};
localForceDerivatives.dF_du = t_R_w;
return localForceDerivatives;
}
dh/df, dh/dff
FrictionConeConstraint::ConeLocalDerivatives FrictionConeConstraint::computeConeLocalDerivatives(const vector3_t& localForces) const {
const auto F_x_square = localForces.x() * localForces.x();
const auto F_y_square = localForces.y() * localForces.y();
const auto F_tangent_square = F_x_square + F_y_square + config_.regularization;
const auto F_tangent_norm = sqrt(F_tangent_square);
const auto F_tangent_square_pow32 = F_tangent_norm * F_tangent_square; // = F_tangent_square ^ (3/2)
ConeLocalDerivatives coneDerivatives{};
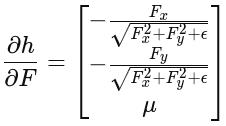
//对h(F) = u * (Fz + gripperForce) - sqrt(Fx * Fx + Fy * Fy + regularization)求一阶偏导
coneDerivatives.dCone_dF(0) = -localForces.x() / F_tangent_norm;// dh/dx
coneDerivatives.dCone_dF(1) = -localForces.y() / F_tangent_norm;// dh/dy
coneDerivatives.dCone_dF(2) = config_.frictionCoefficient;// dh/du
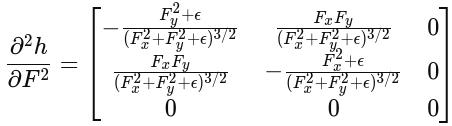
//二阶偏导
coneDerivatives.d2Cone_dF2(0, 0) = -(F_y_square + config_.regularization) / F_tangent_square_pow32;
coneDerivatives.d2Cone_dF2(0, 1) = localForces.x() * localForces.y() / F_tangent_square_pow32;
coneDerivatives.d2Cone_dF2(0, 2) = 0.0;
coneDerivatives.d2Cone_dF2(1, 0) = coneDerivatives.d2Cone_dF2(0, 1);
coneDerivatives.d2Cone_dF2(1, 1) = -(F_x_square + config_.regularization) / F_tangent_square_pow32;
coneDerivatives.d2Cone_dF2(1, 2) = 0.0;
coneDerivatives.d2Cone_dF2(2, 0) = 0.0;
coneDerivatives.d2Cone_dF2(2, 1) = 0.0;
coneDerivatives.d2Cone_dF2(2, 2) = 0.0;
return coneDerivatives;
}
H(F)计算
\(h(F) = u(F_z + F_{gripper}) - \sqrt{F^2_x + F^2_y + \epsilon} >= 0\)
vector_t FrictionConeConstraint::coneConstraint(const vector3_t& localForces) const {
const auto F_tangent_square = localForces.x() * localForces.x() + localForces.y() * localForces.y() + config_.regularization;
const auto F_tangent_norm = sqrt(F_tangent_square);
const scalar_t coneConstraint = config_.frictionCoefficient * (localForces.z() + config_.gripperForce) - F_tangent_norm;
return (vector_t(1) << coneConstraint).finished();
}
dh/du, dh/duu
FrictionConeConstraint::ConeDerivatives FrictionConeConstraint::computeConeConstraintDerivatives(
const ConeLocalDerivatives& coneLocalDerivatives, const LocalForceDerivatives& localForceDerivatives) const {
ConeDerivatives coneDerivatives;
// First order derivatives
coneDerivatives.dCone_du.noalias() = coneLocalDerivatives.dCone_dF.transpose() * localForceDerivatives.dF_du;
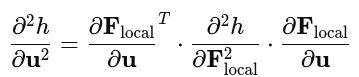
// Second order derivatives
coneDerivatives.d2Cone_du2.noalias() =
localForceDerivatives.dF_du.transpose() * coneLocalDerivatives.d2Cone_dF2 * localForceDerivatives.dF_du;
return coneDerivatives;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号