Houdini MPM 笔记
// 变形梯度(Deformation Gradient)
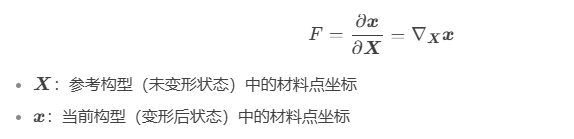
变形梯度 F 是连续介质力学中描述物体局部变形的核心张量,它完整刻画了材料点附近无限小区域的变形(拉伸/剪切)和刚性旋转。 其数学定义为:
直观理解:
变形梯度 F 将一个参考构型中的微小线段 dX 映射到当前构型中的线段 dx=F⋅ dX,同时包含了该点的局部旋转和形变信息。
变形梯度的关键特性:
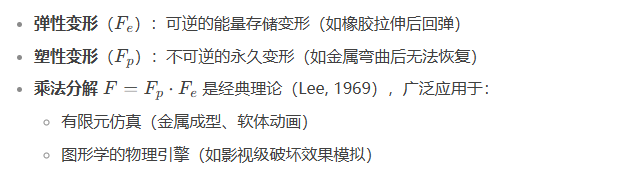
// 变形梯度在物理仿真中的应用

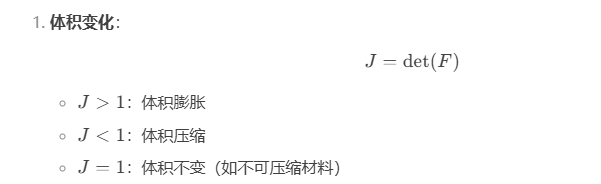
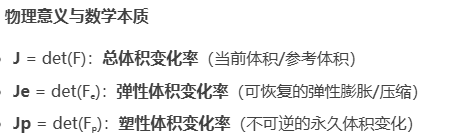
// 体积变化率 J = det(F) = Jp * Je
J = det(F)的物理意义,即体积变化率。然后分解成Jp和Je,说明弹性部分Je对应可恢复的体积变化,而塑性部分Jp对应不可逆的体积变化。例如,金属塑性变形通常假设体积不变,所以Jp=1,而Je可能包含弹性体积变化。但对于多孔材料,Jp可能不等于1,这时候就需要考虑塑性体积变化。

// 从MPM结算的粒子中筛选POP发射源
这是官方MasterClass的一个案例。艺术家先是用MPM结算了主体的Snow , 然后想在这些Snow的主体粒子中帅选出粒子作为POP发射源。比较有意思的是在vex中通过比较ΔJp,ΔJp>0说明塑性体积在膨胀变大,可以筛选出这部分做发射源,增加细节。
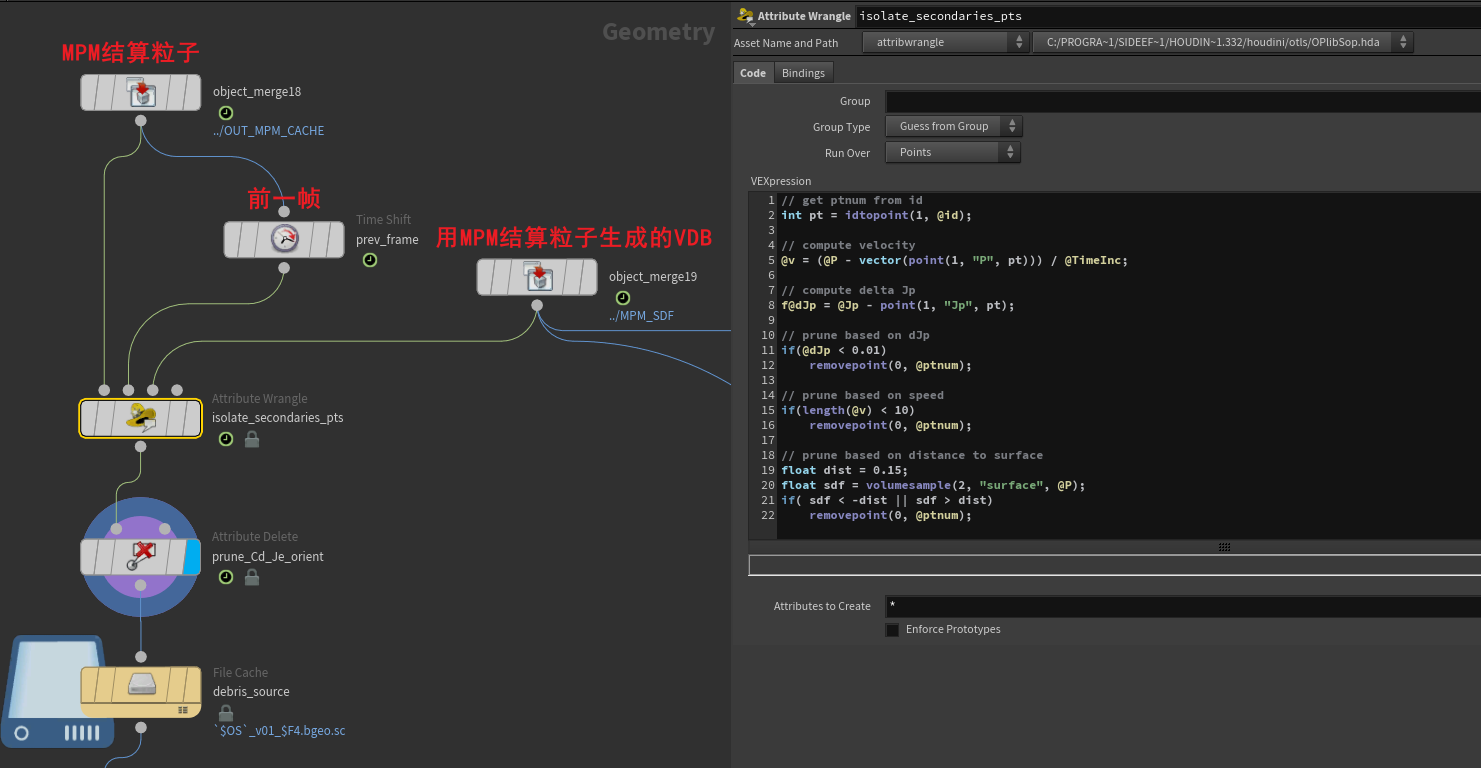


// get ptnum from id int pt = idtopoint(1, @id); // compute velocity @v = (@P - vector(point(1, "P", pt))) / @TimeInc; // compute delta Jp f@dJp = @Jp - point(1, "Jp", pt); // prune based on dJp if(@dJp < 0.01) removepoint(0, @ptnum); // prune based on speed if(length(@v) < 10) removepoint(0, @ptnum); // prune based on distance to surface float dist = 0.15; float sdf = volumesample(2, "surface", @P); if( sdf < -dist || sdf > dist) removepoint(0, @ptnum);
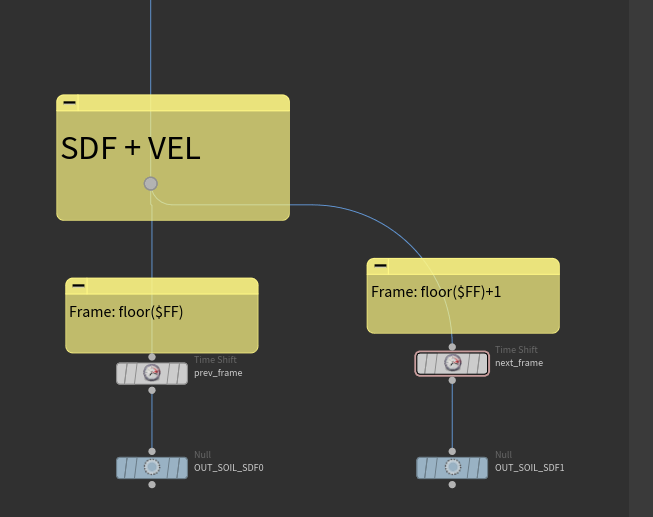
// Fast SDF Collision
输入端口1是碰撞SDF + VEL 场
float sdf; vector grad, vel; sdf = volumesample(1, 0, @P) - @pscale; if (sdf < 0) { grad = normalize(volumegradient(1, 0, @P)); vel = volumesamplev(1, "vel", @P); @P -= grad * sdf; vector rel_vel = @v - vel; float friction = 1; float sticky = 0; float v_dot_n = dot(rel_vel, grad); if (v_dot_n < sticky) { vector v_tangent = rel_vel - grad * v_dot_n; v_dot_n = abs(v_dot_n); float v_tangent_length = length(v_tangent); if (v_tangent_length <= friction * v_dot_n) { // static friction rel_vel = 0; } else { // dynamic friction rel_vel = v_tangent - (friction * v_dot_n * v_tangent) / v_tangent_length; } @v = rel_vel + vel; } }
// 做粒子结算时,如果substep>1, 这时如果想要准确点的SDF, 可以这样简单的插值
float bias = frac(@Frame); vector vel0 = volumesamplev(0, "vel", @P); vector vel1 = volumesamplev(1, "vel", @P); vel = lerp(vel0, vel1, bias); // compute sample pos vector pos0 = @P - bias * @TimeInc * vel; vector pos1 = @P + (1.0f - bias) * @TimeInc * vel; // sample sdf float sdf0 = volumesample(0, "surface", pos0); float sdf1 = volumesample(1, "surface", pos1); sdf = lerp(sdf0, sdf1, bias) - @pscale;
输入端口0,1,如下
// 计算平均orient
输入是一些点,每个点都有自己的orient属性。想计算这些点的平均orient可以这样操作。
先把所有点的orient属性写入到detail的数组里面
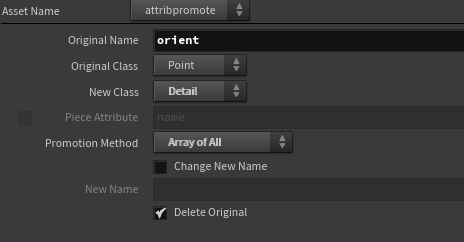
然后转移到点上
p[]@orients = detail(1, "orient");
最后
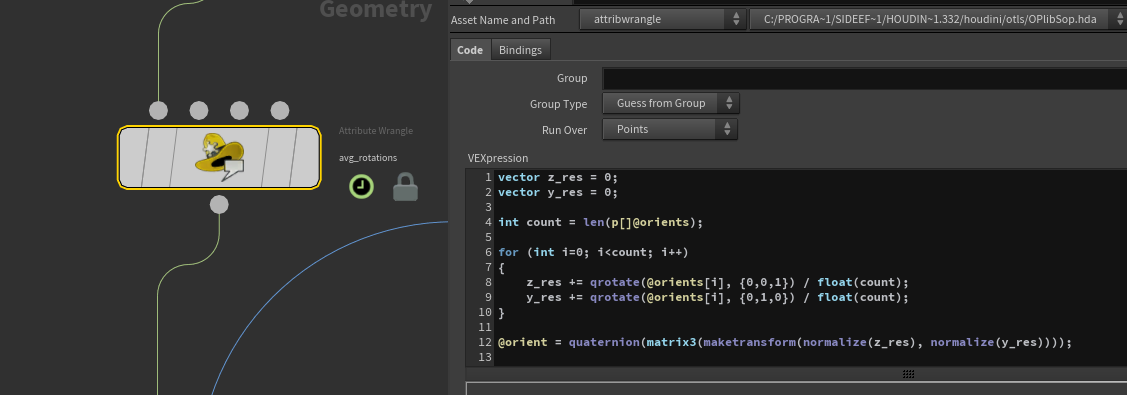
vector z_res = 0; vector y_res = 0; int count = len(p[]@orients); for (int i=0; i<count; i++) { z_res += qrotate(@orients[i], {0,0,1}) / float(count); y_res += qrotate(@orients[i], {0,1,0}) / float(count); } @orient = quaternion(matrix3(maketransform(normalize(z_res), normalize(y_res))));

 浙公网安备 33010602011771号
浙公网安备 33010602011771号