

【文献阅读】基于规则的无人机集群运动控制
2021.09.04
基于规则的无人机集群运动控制
一、应用背景
👉 大背景:航空集群作战;
👉 文中解决的问题:遵守避撞、聚集、速度匹配规则,保证集群沿预先规划的航路飞行,实现集群安全到达作战区域和顺利返航
二、研究思路
(1)将集群中,知晓目标信息的无人机设置为领航者,其余无人机设置为跟随者;
(2)根据运动规则(避撞、聚集、速度匹配),建立集群动力学模型和个体运动控制器模型;
(3)利用模型,对集群进行动力学分析,以确定集群运动航线,控制集群飞行;
(4)仿真测试:取适当步长,对各无人机进行动力学分析,得各时刻无人机的位置,以此生成各无人机的航线,再由领航者控制无人机集群沿生成的航线飞行。
三、研究细节
(1)运动规则
① 避撞规则:在飞行过程中,无人机之间需保持一定的横向间距、纵向距离和高度差(三者满足其一),以保证飞行安全,同时防止与障碍物相撞;
② 聚集规则:无人机之间存在相互靠拢的趋势,以形成编队;
③ 速度匹配规则:集群内所有无人机需保持相同速度,以保证集群的整体运动。
(2)模型建立
只考虑同一飞行高度的情况:
① 集群动力学模型:n架无人机,S = < X,P,V,A >,分别表示位置向量、集群控制参数集合、速度向量、加速度向量
② 个体运动控制器:
1. 避免所有无人机都向目标航路点飞行使数目骤增,设置领航者与跟随者;
2. 对于跟随者,通过交感网获取领航者和周围其他跟随者的位置信息,在运动规则的约束下,随集群整体向目标运动。其控制器为 RMA 模型,以加速度a为控制对象,以作用向量以及增益系数(自取)为模型参数;
3. 对于领航者,自身知晓航路点信息并沿航路飞行,具有一定的个体意愿。其控制器为 RMAD 模型
③ 个体运动控制器的作用向量:
吸引、排斥、一致性(由距离决定)
四、可参考的内容
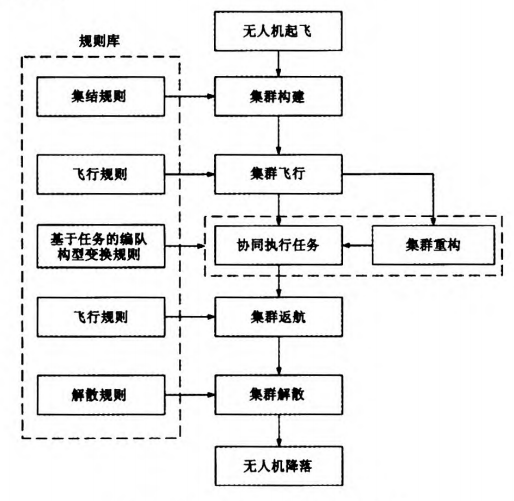
(1)航空集群作战经过**自组织机制与行为调控机制**的有机耦合,集群可产生新的能力或原有能力发生质的变化。集群的一切运动都是**基于规则**进行的,主要运动规则包括**集结/解散规则、飞行规则、基于任务的编队构型变换规则等**,这些规则构成集群运动的规则库。
(2)无人机基于规则库执行任务的一般流程:
首先各无人机从同一机场或不同机场起飞,飞往某一指定空域依照集结规则进行集结;
集结后的无人机集群依据飞行规则以一定的编队形式飞往任务空域;
到达任务空域后针对不同任务的运动规则进行编队构型的调整并协同执行任务,如协同制导、协同反隐身和无源定位等;
任务执行完毕后,再以一定的编队形式依据飞行规则返回指定机场降落
五、启发
·文中将各规则(约束)简化为 RMA 或 RMAD 模型,可以借用 RMAD 的思想,考虑无人艇的规则(约束),引入排斥、一致、吸引、个体意愿作用,进行船舶的控制,在分布式控制的基础上,使集群按预先规划的航路航行。
·文中的不足是
# 依赖领航者;
# 没有讨论规则库的其他环节、任务执行;
# 需要研究基于不同任务的编队构型变化问题、控制优化等。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号