
Throttle(油门)、Yaw(偏航)、Roll(横滚)和Pitch(俯仰)
四旋翼无人机的运动通过四个基本控制通道实现:Throttle(油门)、Yaw(偏航)、Roll(横滚)和Pitch(俯仰)。
这些参数通过调节四个电机的转速组合来控制无人机的姿态和运动方向。
先来直观的感受一下Yaw(偏航)、Roll(横滚)和Pitch(俯仰)
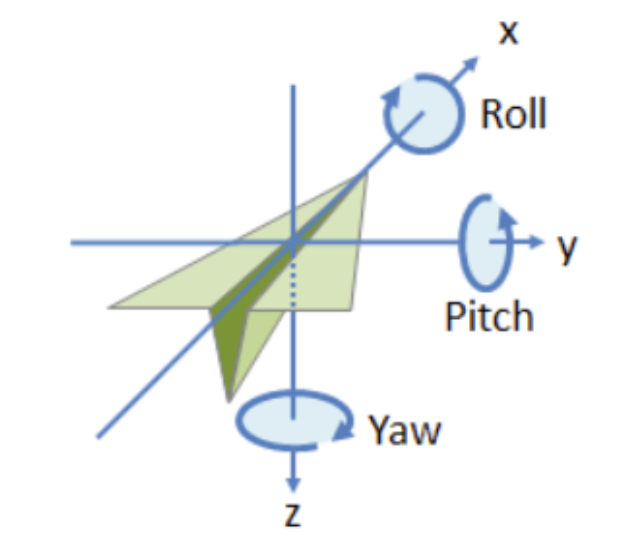
Pitch(俯仰)
Yaw(偏航)
Roll(横滚)
1. 基本控制参数
(1)Throttle(油门)
• 定义:控制无人机的垂直运动(上升/下降)。
• 原理:同时增加或减少所有电机的转速。
• 油门增大 → 四个电机转速同时提高 → 升力超过重力 → 无人机上升。
• 油门减小 → 四个电机转速降低 → 升力小于重力 → 无人机下降。
• 关键作用:悬停时需要精确调节油门以抵消重力。
(2)Yaw(偏航)
• 定义:控制无人机绕垂直轴的旋转(左转/右转)。
• 原理:通过对角电机转速差产生扭矩。
• 关键作用:调整无人机机头指向,改变飞行方向。
(3)Roll(横滚)
• 定义:控制无人机绕纵轴(机头到机尾方向)的倾斜(左倾/右倾)。
• 原理:通过左右侧电机转速差产生倾斜。
• 关键作用:控制无人机横向平移(左右移动)。
(4)Pitch(俯仰)
• 定义:控制无人机绕横轴(左右机翼方向)的倾斜(前倾/后仰)。
• 原理:通过前后电机转速差产生倾斜。
• 关键作用:控制无人机前后平移。
2. 如何控制无人机运动?
四旋翼无人机通过组合上述四个参数实现复杂的三维运动:
-
垂直运动:调节油门(Throttle)。
-
水平运动:
• 前/后移动 → 控制俯仰(Pitch),使无人机前倾或后仰,配合油门维持高度。• 左/右移动 → 控制横滚(Roll),使无人机左倾或右倾,配合油门维持高度。
-
转向:调节偏航(Yaw)改变机头方向,再结合俯仰/横滚调整运动方向。
-
悬停:油门抵消重力,俯仰、横滚、偏航均归零。
3. 实际操控示例
• 向前飞行:增大俯仰(机头下压),同时适当增加油门以维持高度,无人机向前推进。
• 向右平移:增大横滚(右侧电机加速,左侧减速),无人机向右倾斜,升力的水平分力推动向右移动。
• 原地旋转:增大偏航(对角电机转速差),无人机绕垂直轴旋转,其他通道保持中立。
总结
• Throttle:垂直运动
• Yaw:转向
• Roll:横向平移
• Pitch:前后平移
通过协调这四个参数,无人机可以完成悬停、平移、转向和复杂飞行动作。实际操控中需配合传感器(如陀螺仪、加速度计)实现稳定飞行。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号