OpenCV学习代码记录—— Snake轮廓
很久之前学习过一段时间的OpenCV,当时没有做什么笔记,但是代码都还在,这里把它贴出来做个记录。
代码放在码云上,地址在这里https://gitee.com/solym/OpenCVTest/tree/master/OpenCVTest
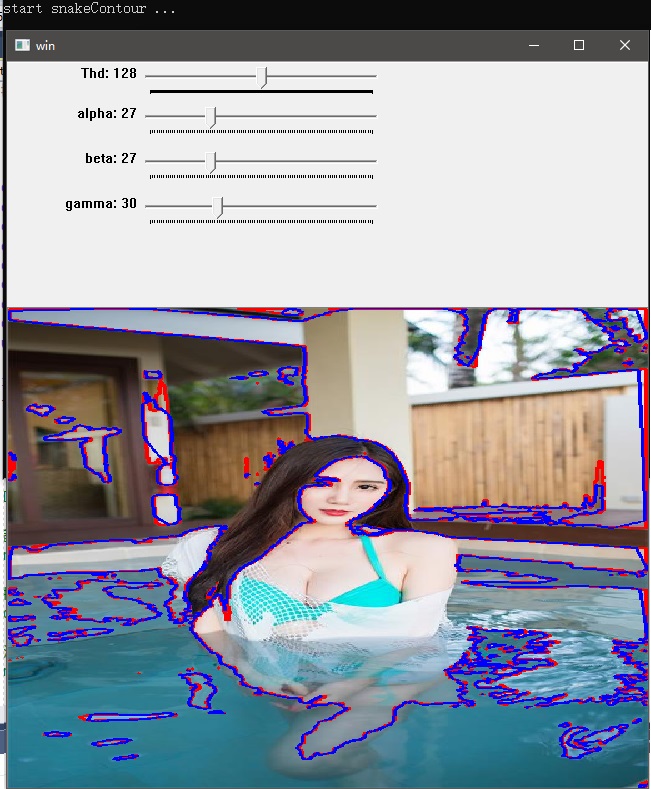
效果
代码
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/legacy/legacy.hpp> // cvSnakeImage
// http://blog.csdn.net/hongxingabc/article/details/51606520
//http://wiki.opencv.org.cn/index.php/Snake%E8%BD%AE%E5%BB%93%E4%BE%8B%E5%AD%90
static cv::Mat src, src_bak; // 原始图像及其备份
static int thresholdness = 128; // 阈值
// 下面的参数用于滑块的值传出
static int ialpha = 20; // alpha代表点相互靠拢的权值(0-1.0)
static int ibeta = 20; // beta表示弯曲能量(越小越容易弯曲)(0-1.0)
static int igamma = 20; // gamma表示整体能量(0-1.0)
void on_change(int pos,void*);
int snakeContour()
{
// 创建窗口
cv::namedWindow("win", 0);
// 添加四个进度条(滑块条)
cv::createTrackbar("Thd", "win", &thresholdness, 255, on_change);
cv::createTrackbar("alpha", "win", &ialpha, 100, on_change);
cv::createTrackbar("beta", "win", &ibeta, 100, on_change);
cv::createTrackbar("gamma", "win", &igamma, 100, on_change);
cv::resizeWindow("win", 640, 480);
// 调用一次on_change,以便显示出窗口
on_change(0,NULL);
while (true){
if (cv::waitKey(40) == 27) {
cv::destroyWindow("win");
break; // 按下ESC键就退出
}
// 显示图像到窗口
cv::imshow("win", src_bak);
}
return 0;
}
void on_change(int,void*)
{
// 读取原图像
src_bak = cv::imread("../Image/sisy.jpg", 1);
// 转换为灰度图像
cv::cvtColor(src_bak, src, CV_BGR2GRAY);
// 对单通道数组应用固定阈值操作。该函数的典型应用是对灰度图像进行阈值操作得到二值图像。
// 二值化操作
cv::threshold(src/*原始图像(单通道)*/,
src/*目标图像(与原始图像类型一致)*/,
thresholdness/*二值化控制阈值*/,
255/*使用 CV_THRESH_BINARY 和 CV_THRESH_BINARY_INV 的最大值*/,
CV_THRESH_BINARY/*阈值类型*/);
// CV_THRESH_BINARY:如果 src(x, y)>threshold, dst(x, y) = max_value; 否则, dst(x, y) = 0;
// CV_THRESH_BINARY_INV:如果 src(x, y)>threshold, dst(x, y) = 0; 否则, dst(x, y) = max_value.
// CV_THRESH_TRUNC:如果 src(x, y)>threshold,dst(x, y) = max_value; 否则dst(x, y) = src(x, y).
// CV_THRESH_TOZERO:如果src(x, y)>threshold,dst(x, y) = src(x, y); 否则 dst(x, y) = 0。
// CV_THRESH_TOZERO_INV:如果 src(x, y)>threshold,dst(x, y) = 0; 否则dst(x, y) = src(x, y).
std::vector<std::vector<cv::Point> > contours;
// http://www.360doc.com/content/12/1028/14/6408986_244247418.shtml
// 寻找初始化轮廓
cv::findContours(src/*输入图像(2值单通道图像)*/,
contours/*传出检测的轮廓点数组*/,
CV_RETR_EXTERNAL/*轮廓检测模式*/,
CV_CHAIN_APPROX_SIMPLE/*轮廓近似方式*/,
cv::Point(0, 0)/*轮廓点偏移量*/);
if (contours.empty()) {
return; //没有检测到轮廓
}
// 绘制轮廓线(绘制到备份的图像上)
cv::drawContours(src_bak, contours, -1, cv::Scalar(0, 0, 255), 2, 8);
{
// 获取alpha、beta、gamma三个值
float alpha = ialpha / 100.0f;
float beta = ibeta / 100.0f;
float gamma = igamma / 100.0f;
// 改变轮廓位置使得它的能量最小
// 因为没有C++的接口,所以这里使用C的接口
IplImage ipl_src = IplImage(src);
// 每个点用于搜索最小值的邻域尺寸,两个 win.width 和 win.height 都必须是奇数
CvSize size;
size.width = 3; size.height = 3;
// 终止条件
CvTermCriteria criteria;
criteria.type = CV_TERMCRIT_ITER;
criteria.max_iter = 1000;
criteria.epsilon = 0.1;
// 梯度符号。如果非零,函数为每一个图像象素计算梯度幅值,且把它当成能量场,否则考虑输入图像本身。
int calc_gradient = 1;
std::vector<CvPoint> point_arr; // 用于获取一个轮廓环的特征点
for (int nline = 0; nline < contours.size(); ++nline) {
// 当前轮廓线点数
int point_count = contours[nline].size();
if (point_count > 2) { // 低于3个点的时候,会出错
point_arr.resize(point_count);
} else {
continue;
}
// 拷贝特征点
for (int npt = 0; npt < contours[nline].size(); ++npt) {
point_arr[npt] = contours[nline][npt];
}
// 执行改变轮廓位置使得它的能量最小
cvSnakeImage(&ipl_src/*输入图像或外部能量域*/,
point_arr.data()/*传入传出轮廓点*/,
point_count/*传入轮廓点数组大小*/,
&alpha/*连续性能量的权 Weight[s],单个浮点数或长度为 length 的浮点数数组,每个轮廓点有一个权*/,
&beta/*曲率能量的权 Weight[s],与 alpha 类似*/,
&gamma/*图像能量的权 Weight[s],与 alpha 类似*/,
CV_VALUE/*前面三个参数的不同使用方法*/,
/*CV_VALUE 表示每个 alpha, beta, gamma 都是指向为所有点所用的一个单独数值;
CV_ARRAY 表示每个 alpha, beta, gamma 是一个指向系数数组的指针,snake 上面各点的系数都不相同。
因此,各个系数数组必须与轮廓具有同样的大小。所有数组必须与轮廓具有同样大小*/
size, criteria, calc_gradient);
// 显示曲线(蓝色)
for (int prev = 0; prev < point_count; ++prev) {
int next = (prev + 1) % point_count;
// 绘线,蓝色
cv::line(src_bak, point_arr[prev], point_arr[next], cv::Scalar(255, 0, 0), 2, 8, 0);
}
}
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号