
Harris Corner Detector
一、代码功能
- 写代码实现Harris Corner检测算法
- 读入摄像头, 按空格暂停回放并做一次Harris Corner检测
- 将中间结果保存下来
二、软件说明
1) 环境依赖
- opencv3.4
- mingw64 (作者采用的编译器, 也可以采用其他的)
2) 编译项目
- 修改makefile文件中的
INCLUDE_PATH和LIB_PATH,改为本机opencv的路径 - 输入
make或者mingw32-make即可编译
3) 运行程序
终端输入./harris.exe(window环境)即可运行, 按下空格键即可做一次Harris Corner检测,程序会自动将中间结果的图保存下来. 再按一次空格, 可以继续选择.
三、算法实现
1) 提取过程
-
按下空格后从摄像头读取图片, 并转为灰度图
-
使用sobel算子计算Ix,Iy的值, 代码中采用的为5*5的sobel算子
-
计算Ix采用的算子
![quicker_d4e9f5ac-8a4d-4c2f-8200-65103a860806.png]()
-
计算Iy采用的算子
![quicker_35522f72-172d-4df7-bb17-41b763e25895.png]()
-
-
使用window(x,y)窗口对Ix,Iy进行加权平均,窗口算子如下
![quicker_d538cd47-59d0-47b3-a43d-e20dba8cec70.png]()
-
计算特征矩阵的特征值max, min
![quicker_970c3694-2245-4f36-bf45-d05b6dad182e.png]()
-
根据以下公式计算R的值
![quicker_eab9c4de-4cc8-4dad-817b-b8db1730f622.png]()
-
最后根据R的值来选取特征点(其中R值为正且数值较大的点归为角点, R值为负且值较大的点归为边缘点, 剩下的归为块状区域点.




2) 主要算法
-
自己封装了一个卷积函数, 用于sobel算子求梯度和window窗口求加权平均值, 函数核心代码如下:
/** * @param image 被卷积的矩阵,通道数需要为1 * @param filter 卷积的算子, 长和宽需要是奇数 * @return 卷积的结果, 大小和image保持一致 * @description: 计算卷积 */ cv::Mat Harris::convolve(cv::Mat image,cv::Mat filter){ for(int y = 0; y < image_h; y++){ for(int x = 0; x < image_w; x++){ for(int j = -half_filter_h; j <= half_filter_h; j++){ for(int i = -half_filter_w; i <= half_filter_w; i++){ //卷积的值越界(超出原图的范围,则该点用中心点代替) if(x+i<0 || x+i >= image_w || y+j < 0 || y+j >= image_h){ ...//省略, 算子扫描时越界, 则用当前点的值代替 }else{ ...//细节省略 } } } } } } -
计算特征矩阵的特征值, 计算特征值时采用opencv提供的
cv::eigen函数进行实现, 将得到的两个参数分别存入max和min图中. -
计算得到R图后, 设置一定的阈值进行筛选, 和实验二Hough检测结果类似, 检测结果往往是扎堆的, 为了防止过于密集, 采用了一个MASK*MASK大小掩码对于区域的点进行筛选
3) 代码优化
-
使用sobel算子进行梯度求职的时候, 将一个二维的算子查分成两个一维的算子进行卷积, 以达到降低时间复杂度的目的.
/** * 卷积算子 * 2 2 4 2 2 * 1 1 2 1 1 * 0 0 0 0 0 * -1 -1 -2 -1 -1 * -2 -2 -4 -2 -2 */ int y_filter[] = {2,1,0,-1,-2}; int x_filter[] = {1,1,2,1,1}; cv::Mat tmp = convolve<uchar,int32_t>(image,cv::Mat(5,1,CV_32S,y_filter)); Iy = convolve<int32_t,int32_t>(tmp,cv::Mat(1,5,CV_32S,x_filter)); -
设置了一个阈值自动调整机制: 对于不同的结果, 往往会需要不同的阈值. 在阈值过大的情况下, 检测到的角点就会偏少, 所以函数在实现时, 发现检测的角点较少时( < 20), 会自动降低阈值重新检测.核心代码如下:
vector<cv::Point> Harris::getCorners(int threshold) { const double MIN_THRES = 100; //最小阈值 //默认取最大值的十分之一 //默认为相对值, 对于纯色图则不适用, 所以设置100的最小阈值 if(threshold == 0) { threshold = max(0.05*max_r,MIN_THRES); } ....//检测角点 //检测的点过少, 则降低标准再检测一次 if(threshold>MIN_THRES && points.size()<20){ points = getCorners(threshold*0.8); } return points; }
四、实验结果
-
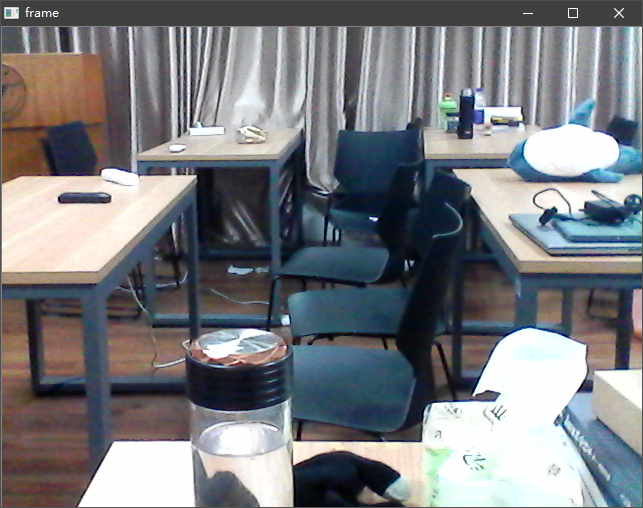
摄像头读入的原图展示如下:
![quicker_d148c3eb-ad53-4f20-aa60-eb151a1bfbaf.png]()
-
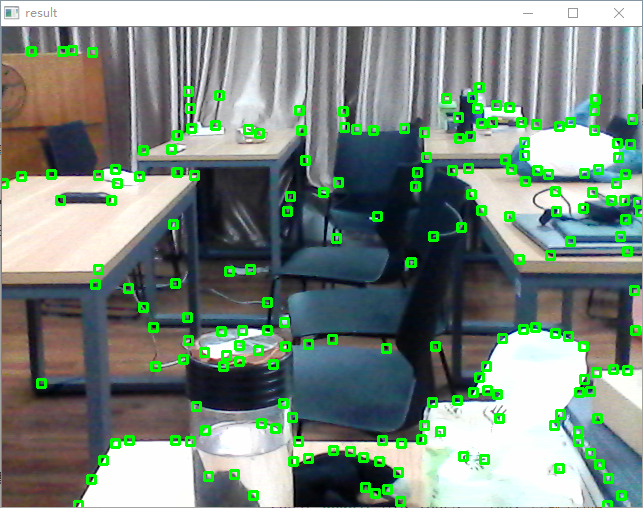
按下空格键, 经过一次Harris Corner检测的结果如下: 可以观察到,复杂场景情况下,桌子,椅子和一些小的物品的角点基本上都能够被正确地识别. (但是也存在少量的点没有被检测出来)
![quicker_37e483b6-1405-492f-9b99-e3c2f97db790.png]()
-
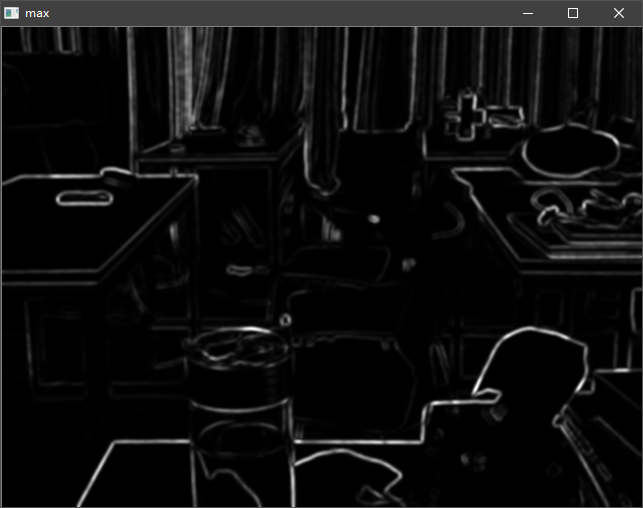
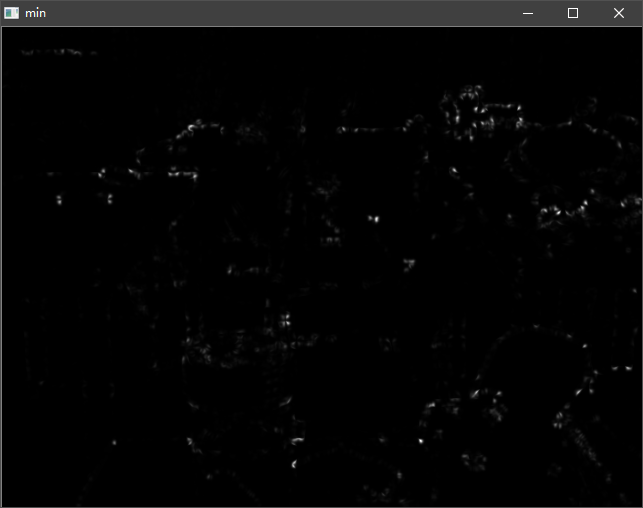
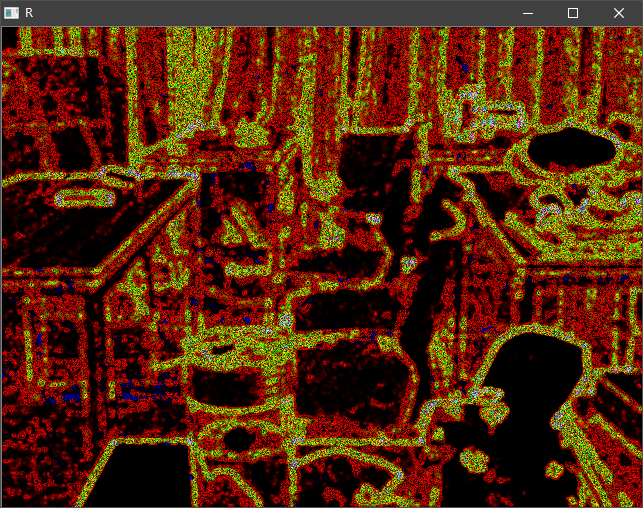
该场景的一些过程图展示如下, 第一张图为特征值中较大者, 第二张为特征值较小者, 第三章图为R图. 在R图中,可以较为直观地看到不同像素点的R值, 其中红色和黑色区域 表示R值比较小, 即块状区域, 黄色表示边缘区域, 白色部分就是我们需要找的角点部分.
![quicker_db9901d4-a002-47de-8d1a-e0a49d812e57.png]()
![quicker_24abc0e3-741d-459a-bb61-30976ea6206d.png]()
![quicker_6d787caa-0ced-4bb6-beea-772c05ea33ab.png]()
-
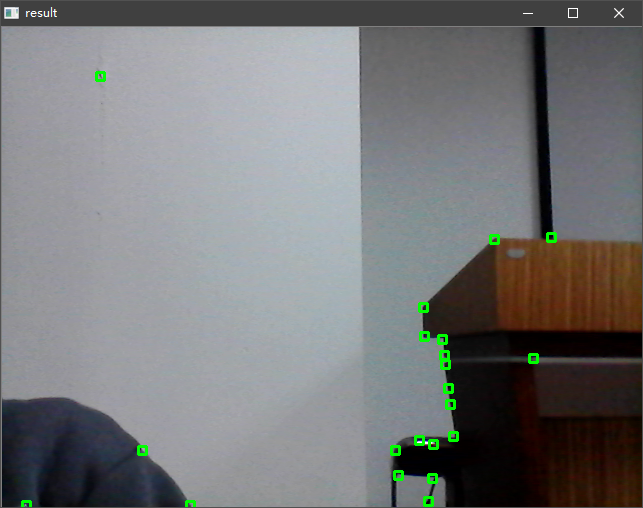
对于一些比较简单的场景, 由于有最小识别数目的保证, 检测效果也比较令人满意, 但是相比于复杂的场景, 将边缘点误认为角点的概率会增大. 展示图如下
![quicker_046f3142-6380-4dd0-b9d0-c7481e401166.png]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号