随笔分类 - 论文阅读
摘要:原始题目 End-to-End Object Detection with Transformers 中文名称 用 Transformer 来做端到端目标检测 发表时间 2020 年 5 月 26 日 平台 ECCV 2020 来源 Facebook AI 文章链接 https://arxiv.or
阅读全文
摘要: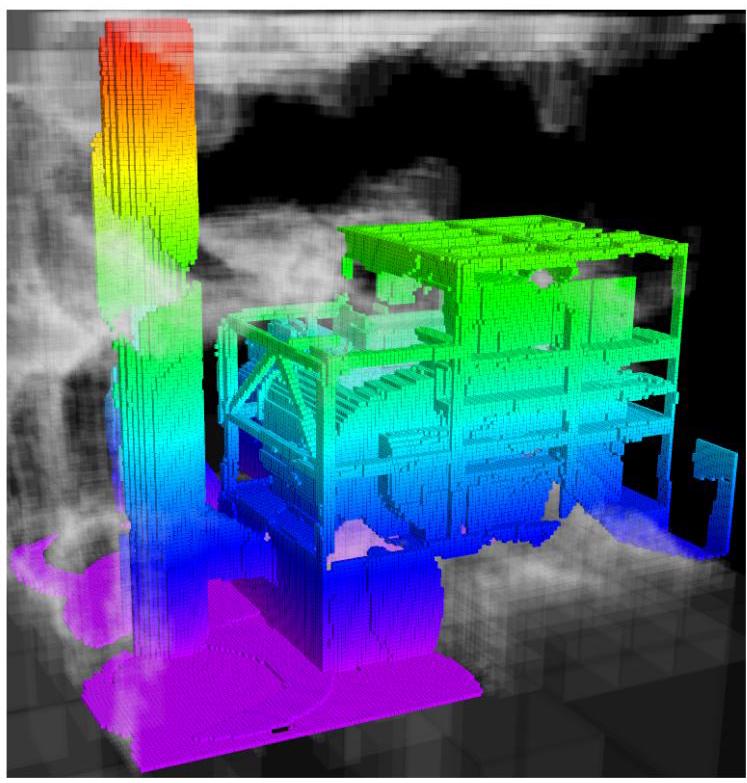 - 在本文中,我们提出了对八叉树地图(OctoMap)的扩展,称之为 UFOMap。
- UFOMap 对地图中的三种状态(即占用、空闲和未知)进行显式表示。令人惊讶的是,这使得表示方式在内存使用上更加高效。
- 此外,我们提供了一些方法,能够显著加快向八叉树中插入数据的速度。这使得高分辨率(低于 $1\mathrm{\;{cm}}$)的实时彩色体素建图成为可能。
- UFOMap 以 C++ 库的形式提供,既可以独立使用,也可以集成到机器人操作系统(ROS)中。
阅读全文
- 在本文中,我们提出了对八叉树地图(OctoMap)的扩展,称之为 UFOMap。
- UFOMap 对地图中的三种状态(即占用、空闲和未知)进行显式表示。令人惊讶的是,这使得表示方式在内存使用上更加高效。
- 此外,我们提供了一些方法,能够显著加快向八叉树中插入数据的速度。这使得高分辨率(低于 $1\mathrm{\;{cm}}$)的实时彩色体素建图成为可能。
- UFOMap 以 C++ 库的形式提供,既可以独立使用,也可以集成到机器人操作系统(ROS)中。
阅读全文
- 在本文中,我们提出了对八叉树地图(OctoMap)的扩展,称之为 UFOMap。
- UFOMap 对地图中的三种状态(即占用、空闲和未知)进行显式表示。令人惊讶的是,这使得表示方式在内存使用上更加高效。
- 此外,我们提供了一些方法,能够显著加快向八叉树中插入数据的速度。这使得高分辨率(低于 $1\mathrm{\;{cm}}$)的实时彩色体素建图成为可能。
- UFOMap 以 C++ 库的形式提供,既可以独立使用,也可以集成到机器人操作系统(ROS)中。
阅读全文
摘要:In particular, the camera pose predictions from visual SLAM enable one to easily ground multiple single-image predictions in a global reference frame.
阅读全文
摘要:英文题目 RAFT: Recurrent All-Pairs Field Transforms for Optical Flow 中文名称 RAFT:用于光流的 Recurrent All-Pairs Field Transforms 发表时间 2020年3月26日 平台 ECCV 2020 Bes
阅读全文
摘要:来自:https://github.com/sair-lab/AirSLAM AirSLAM: An Efficient and Illumination-Robust Point-Line Visual SLAM System AirSLAM:一种高效且对光照鲁棒的点线视觉SLAM系统 Kuan
阅读全文
摘要:LocoTrack,这是一个为跨视频序列跟踪任意点(TAP)任务设计的高准确度和高效率模型
阅读全文
摘要:英文题目 SchurVINS: Schur Complement-Based Lightweight Visual Inertial Navigation System 中文名称 SchurVINS:基于Schur补的轻量级视觉惯性导航系统 发表时间 2023年12月4日 平台 CVPR 2024
阅读全文
摘要:基于半全局匹配和互信息的精确高效立体处理 大佬学术链接:https://scholar.google.com/citations?hl=zh-CN&user=Bs6t1F0AAAAJ&view_op=list_works 维基百科:https://en.wikipedia.org/wiki/Semi
阅读全文
摘要:VINS-Mono:一种稳健且通用的单目视觉-惯性状态估计器
阅读全文
摘要:原始题目 An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale 中文名称 一张图像等价于 16x16 Words: Transformers 来做大规模的图像识别 发表时间 2020年10月22日 平台
阅读全文
摘要:将 SAM 任务转换为经过广泛研究的实例分割任务,并仅使用 SAM 作者发布的SA-1B数据集的1/50进行训练现有的实例分割方法 问题 1: 本文要解决什么问题? SAM 的计算成本高,主要来自于 处理高分辨率输入的 Transformer 架构。本文想要加速 SAM 模型的推理速度。 问题 2:
阅读全文
摘要:原始题目:Bridging the Gap Between Anchor-based and Anchor-free Detection via Adaptive Training Sample Selection 中文翻译:通过 自适应训练样本选择 缩小 Anchor-based and Anch
阅读全文
摘要:原始题目:Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection 中文翻译:Generalized Focal Loss:学习用于密集目标检测的 Qual
阅读全文
摘要:论文:https://arxiv.org/pdf/1608.08710.pdf 摘要 CNN 在各种应用中的成功伴随着计算和参数存储成本的显著增加。最近减少这些开销的努力包括在不损害原始精度的情况下修剪和压缩各个层的权重。然而,基于大小的权值修剪减少了完全连接层的大量参数,并且由于修剪后的网络中的不
阅读全文
摘要:原始题目 OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 中文名称 Openpose:使用 Part Affinity Fields 来 实时 多人 2D 姿态估计 发表时间 2016年11月
阅读全文
摘要:https://www.bilibili.com/video/BV1hd4y187CR 在刚刚结束的 NeurIPS 和 EMNLP 上面,有一个很有意思的现象,就是大家都在讨论一个工作,这个工作既没有发表在 NeurIPS 上面,也没有发表在 EMNLP 上面,它甚至连一篇论文都没有,这就是 Ch
阅读全文
摘要:| 原始题目 | Learning Efficient Convolutional Networks through Network Slimming | | | | | 中文名称 | 通过网络 瘦身(Slimming) 学习高效卷积网络 | | 发表时间 | 2017年8月22日 | | 平台 |
阅读全文
摘要:原始题目 U-Net: Convolutional Networks for Biomedical Image Segmentation 中文名称 U-Net:用于生物医学图像分割的卷积网络 发表时间 2015年5月18日 平台 Miccai 2015 来源 University of Freibu
阅读全文
摘要:| 原始题目 | Enhancing Underwater Imagery using Generative Adversarial Networks | | | | | 中文名称 | 使用 GAN 增强水下图像 | | 发表时间 | 2018年1月11日 | | 平台 | ICRA 2018 |
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号