“三维旋转转换”网页代码学习
- 参考网址
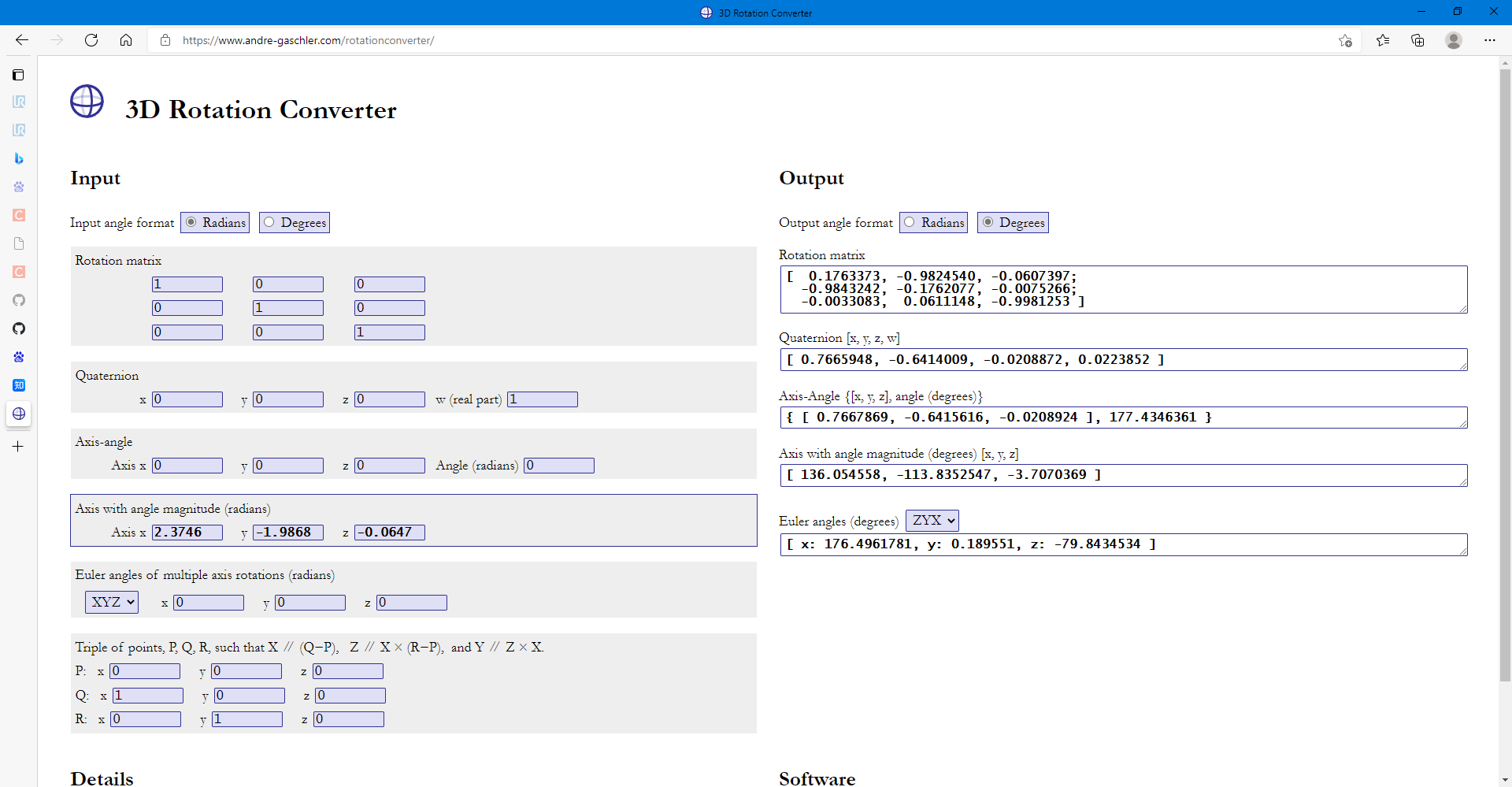
3D Rotation Converter (andre-gaschler.com)
可以使用这个网页在旋转矩阵、轴角、欧拉角、四元数等多种三维旋转形式之间进行转换。
- 调试步骤
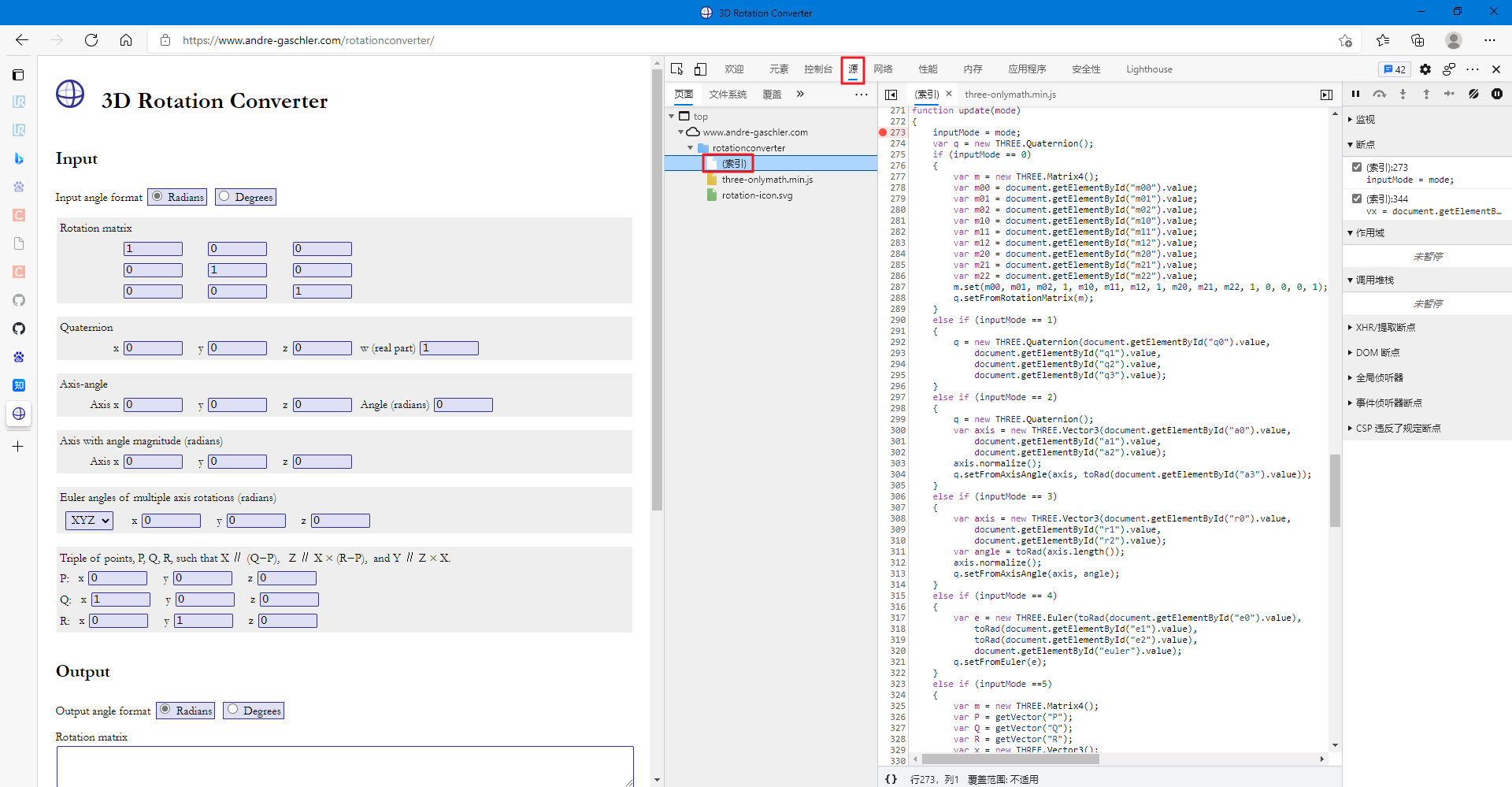
1、用 Microsoft Edge 打开上述链接,按下F12快捷键,打开调试窗口,选中上方tab页中的“源”和树形结构中的“(索引)”。代码中按下“F9”可以设置断点。
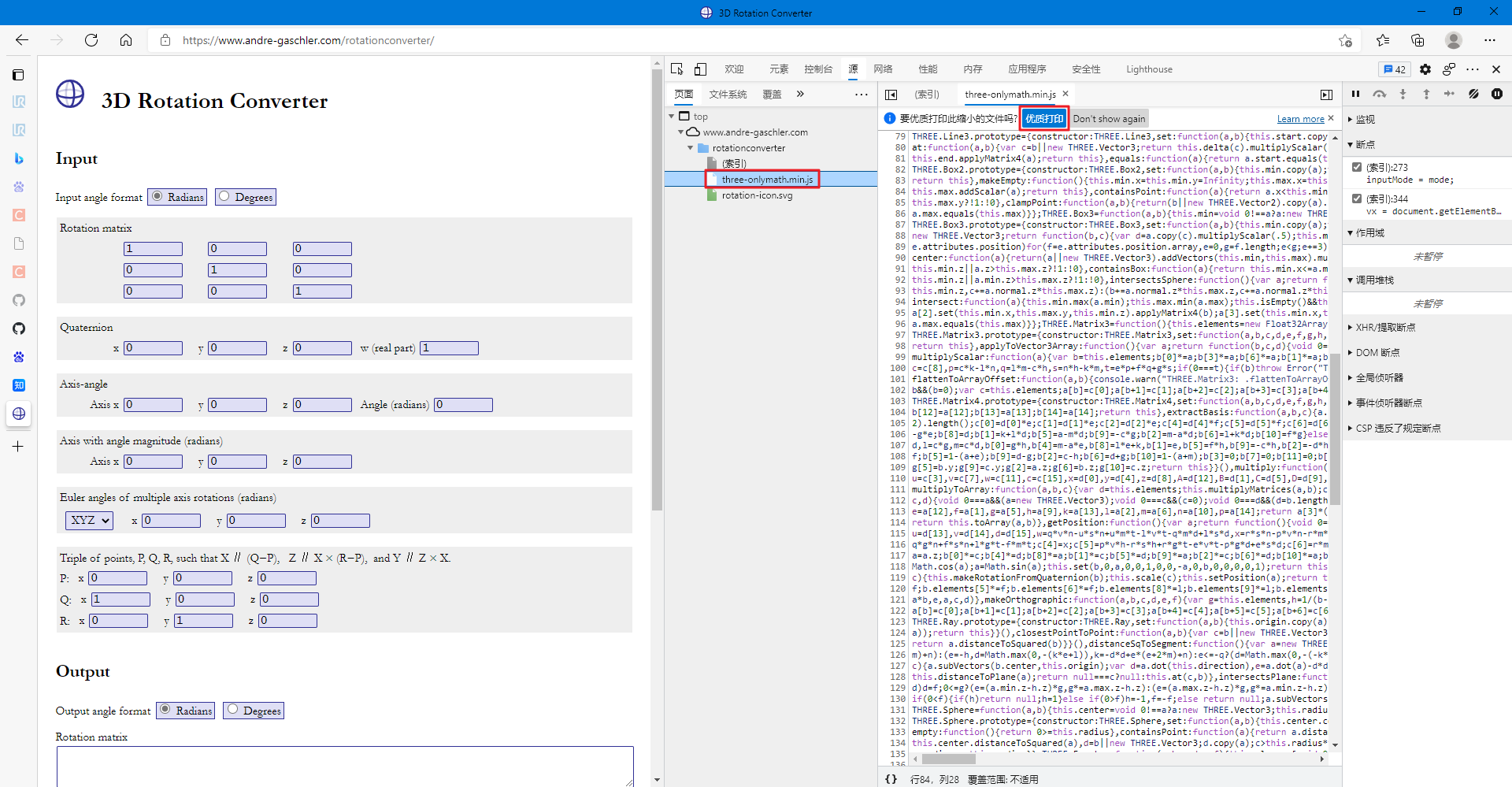
2、再选中”three-onlymath.min.js“,这是转换的核心代码。代码很紧凑,不利于调试,可以点击”优质打印“,重排代码。
3、清爽了。

- 总结
代码中使用了四元数作为过渡,通过四元数计算其他转换。
四元数、轴角形式接近,可以算作一类。
这里的欧拉角是绕固定坐标系旋转的,计算旋转矩阵时使用的是左乘。
UR机械手中的RPY角也是一种欧拉角,因此这里的旋转顺序选择“ZYX”。
UR机械手中的旋转矢量即这里的“Axis with angle magnitude”。
posted on 2021-06-11 09:47 OctoberKey 阅读(618) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号