关于伺服刹车/急停/前后设备信号对接/PLC输入输出模块的公共端介绍
一、伺服刹车
关键词:急停,急停中间继电器、刹车中间继电器,刹车使能
正文:
通常情况不用硬件为主导而用程序来主导控制,多场景应用方便修改且安全可靠。
伺服刹车硬件,一般是24v电源给进去,就会释放刹车使能。
拿一个Z轴伺服作为对象。
1.程序上控制逻辑如下
急停按钮一般都是NC触点串联在电路中,NO触点信号接入急停中间继电器线圈,急停中间继电器NO触点信号再给入PLC作为急停信号。通过下面一段程序。
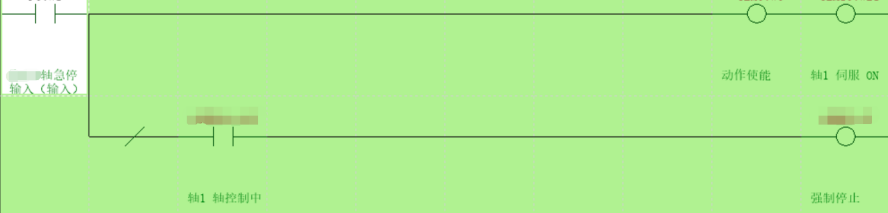
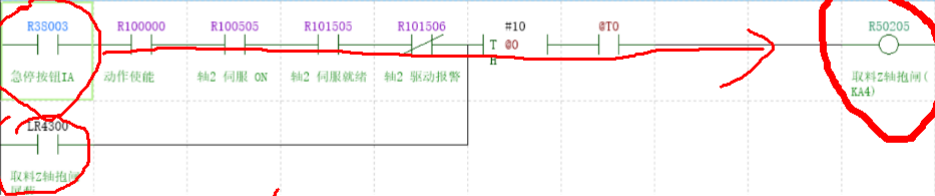
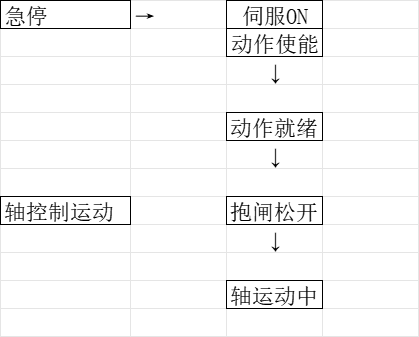
所以,一般情况下,急停没有被拍下,是有信号给plc的。此时急停信号是接通的,动作使能 伺服ON 伺服就绪是接通的,经过消抖后,抱闸线圈接通。程序这段逻辑先捋到这,抱闸线圈对于刹车中间继电器线圈,此时被接通,我们电路上会取刹车中间继电器的NC触点信号接入伺服刹车使能硬件上。所以此时刹车使能硬件是没有电源接入的,所以没有刹车。【不拍急停,伺服松开抱闸使能】
如果拍下急停按钮,急停NO给PLC,急停信号=0,抱闸KA=0,硬件上取其NC信号,刹车硬件没有接入电源,所以处于刹车状态。【拍急停,伺服抱闸】
还有一个屏蔽功能。【拍下急停,Z轴伺服抱闸,屏蔽功能打开,Z轴往下掉】
第二种情况,是取抱闸继电器NO串入抱闸电源回路。
伺服ON、急停信号、抱闸三者之间的关系如下:
正常程序运行中,伺服ON=1,急停=1,抱闸继电器=1。抱闸硬件有电源所以松开。紧急情况拍急停,程序:急停=0→伺服ON=0→抱闸继电器=0。抱闸硬件无电源所以刹车。
看见刹车KA亮则无抱闸有伺服使能ON信号。
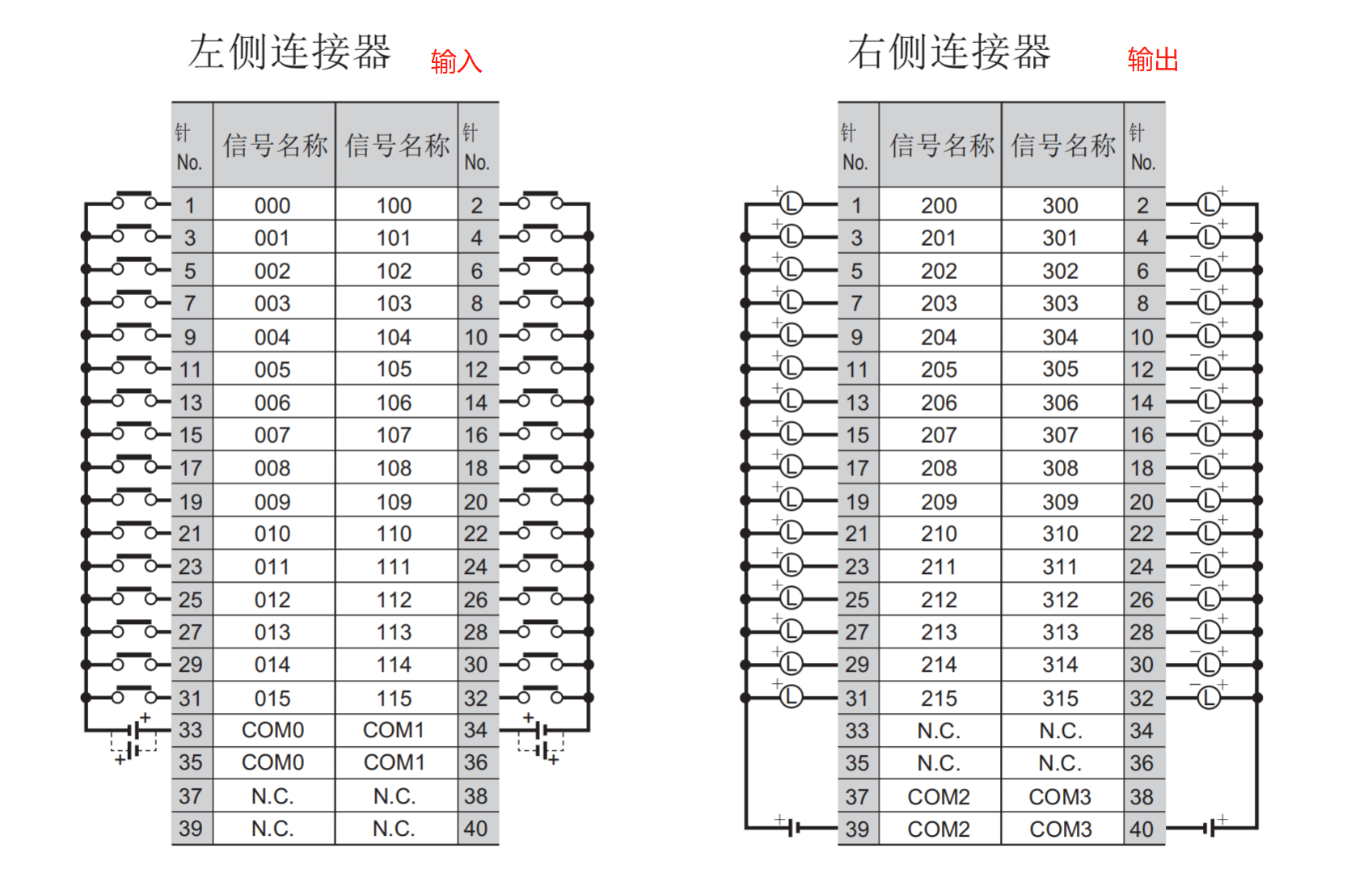
二、PLC的CPU及输入输出模块公共端
关键词:输入 输出 公共端 接线图 源型 漏型
正文:
1.基恩士plc一般输入输出类型都是是NPN即漏型,汇川plc也是。而西门子一般是PNP源型。
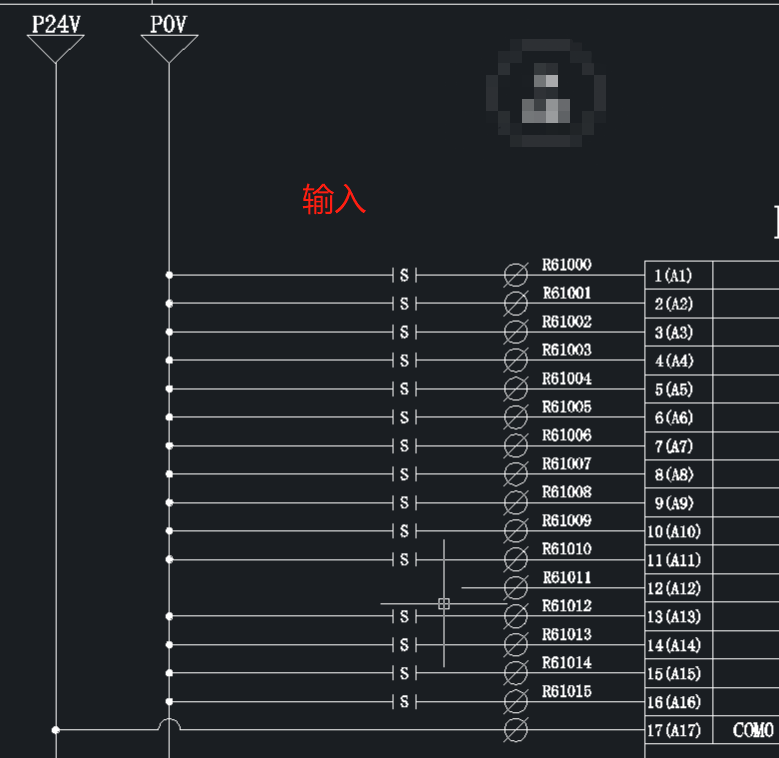
2.漏型,在实际应用中可以记成都是低电平即0V。原理原则:只要有形成电源回路作用在光电耦合器上形成信号输入输出。
输入信号为0v,经过内置电阻,输入公共端为24v。【若是干湿节点可以切换】。
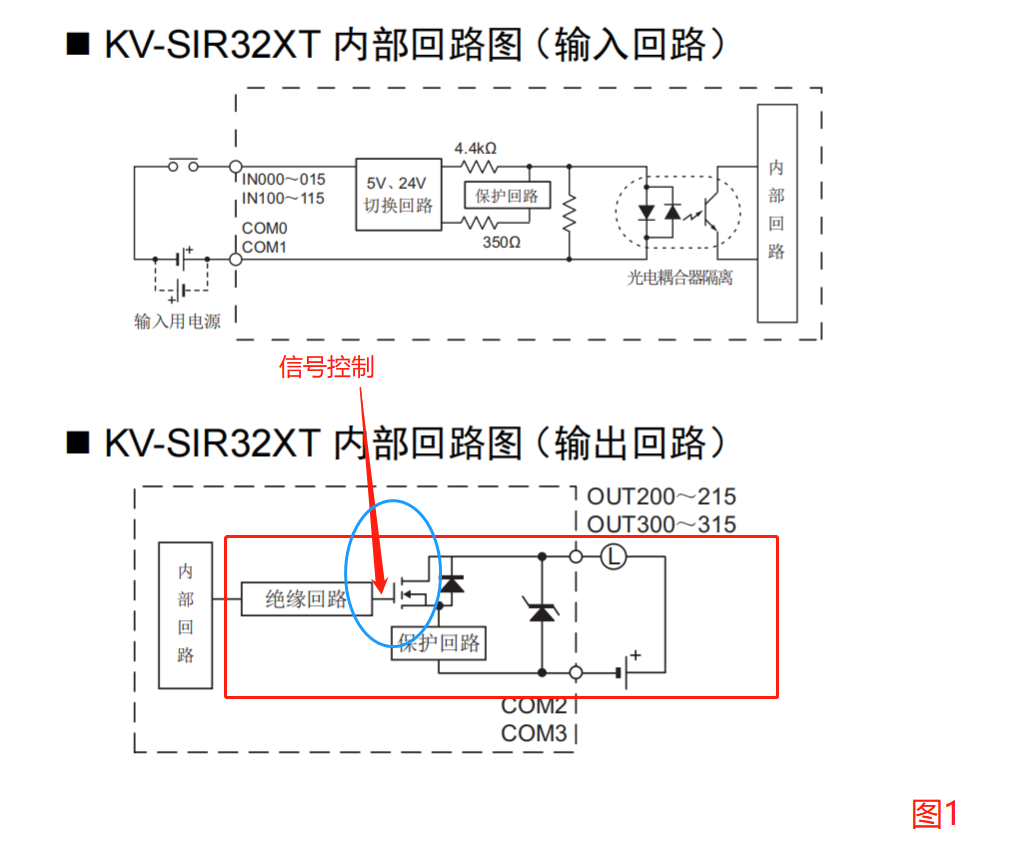
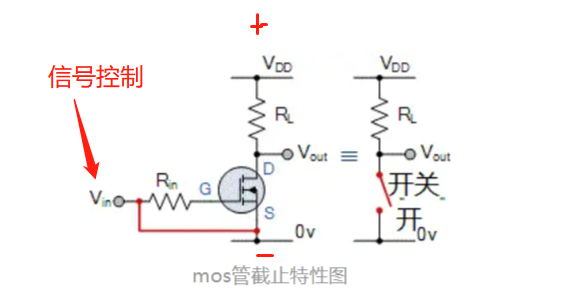
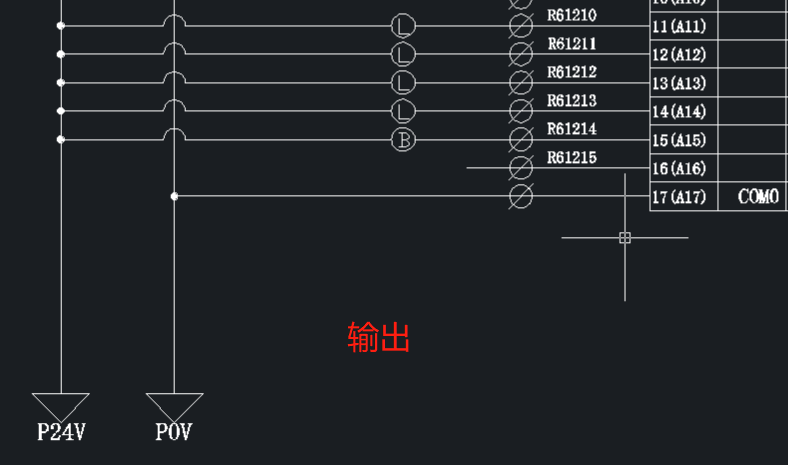
细致分析输出公共端举例:图1输出的内部接线图,我们只看MOS场效应管,和负载L以及DC电源组成的回路。
场效应管的G栅极与S源极施加电压导通后(相当于开关),漏极与源极就会导通与负载和电源形成正确的回路。
一旦控制信号接通施加电压后,负载就会接通。
因此基恩士NPN型plc的输出公共端是0V。
引用MOS管控制原理介绍链接:https://zhuanlan.zhihu.com/p/519594505
如下图:
源型反之。
三、前后设备对接交互信号介绍
关键词:前后机 航空对接插头 前机 本机 后机 请求 允许 完成 就绪 本机电源
此类交互信号传递类型为IO信号,电路上硬件连线即可完成。交互逻辑如下
前机 本机 后机
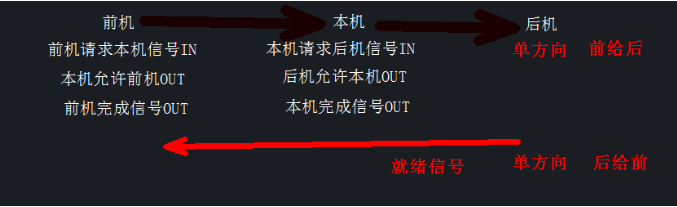
交互一般需要8个信号:4DI、4DO。
设计一台设备只需要站在本机角度去罗列,如下。
本机输入DI: 前机请求 前机完成 后机就绪 后机允许。
本机输出DO: 本机允许 本机就绪 本机请求 本机完成。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号