从Bayesian角度浅析Batch Normalization
前置阅读:http://blog.csdn.net/happynear/article/details/44238541——Batch Norm阅读笔记与实现
前置阅读:http://www.zhihu.com/question/38102762——知乎网友
Deep Learning与Bayesian Learning在很多情况下是相通的,随着Deep Learning理论的发展,
我们看到,Deep Learning越来越像Bayesian Learning的一个子集,Deep Learning的高手当中,
很多也是Bayesian Learning高手,尤其是Hinton一门,嘲讽Hinton只会神经玄学的可以去一边凉快了。
尤其是Hinton的首席弟子——Russ Salakhutdinov,对Bayesian Learning的造诣相当高。
Deep Learning的很多做法,从Bayesian角度都可以合理给出解释。
相反,Vapnik的统计机器学习,看起来就和Bayesian背道而驰。
ICML 2015火起来的Batch Normalization,同样也有一些Bayesian的道理。
零均值、单位方差
L2-NORM
零均值、等量方差的高斯分布在贝叶斯拟合领域有个重要身份——L2-NORM
在PRML的序章,Bishop揭示了L2-NORM的由来:
I、似然函数*先验分布=后验分布
II、log(后验分布)=log(似然函数)+L2-NORM
很不巧的是,这个先验分布恰恰是零均值、等量方差的高斯分布:
$N(w|0,\alpha^{-1}I)$
不过较为特殊的是,等量方差仅限于协方差矩阵的对角线,这与Batch Norm的简化方差是相同的处理。
Regularizer
PRML读书后记(一): 拟合学习解释了加入等量方差之后,后验分布的拟合会受到一种压制之力。
在式 $-ln\,p(w|T)= \frac{\beta}{2}\sum _{n=1}^{N}\{t_{n}-w^{T}\phi (x_{n})\}^{2}+\frac{\alpha}{2}W^{T}W+const$ 中,
如果我们考虑将等量方差设为1,即$\alpha=1$,那么在L2-NORM中,对参数$W$的压制是相当大的。
这点在从参数$W$,迁移到输入$X$的时候,效果仍然存在。
固定输入$X$的高斯分布,本质是压制输入$X$的波动,进而均衡各层的输入量级。
共轭分布与表征破坏
与在目标函数里加入先验分布的假设一样,对输入做标准化,依然会改变其分布。
做标准化的分布,会以共轭分布的形式,叠加至原始分布中。
考虑这么一种情况:
假设在神经网络某层激活之后,传递的新一层当中,我们得到关于输出的分布$P(X)$,
如果我们在学习一群猫,那么$P(X)$就可能是关于描述一张猫脸的概率分布。
这种理解,来自于对Deep Learning与Bayesian Learning的结合,即:
神经网络的逐层抽象,本身就是对自然物体在自然界中存在的概率建模。
单独从传统Bayesian Learning角度看,我们很少会考虑对图像的特征概率建模,
如何计算一张图的概率?
CV界的老一辈大牛会告诉你,根本不可能,乖乖用人工特征吧。
但是神经网络却可以做到这点,基于误差的修正,本身是可以近似出图像的特征概率的。
这种想法,在早期,对于传统CV界,以及传统Bayesian界,都是天方夜谭,但是Deep Learning却做到了。
Salakhutdinov教授在2015年的BPL中,更进一步,对图像特征的概率建模,大胆,而且有趣。
而且也证明了一点,对图像特征的直接概率建模比基于误差迭代计算概率的Deep Learning更有效率,
前者只需要使用很少的数据,后者则需要要庞大的数据支持,才能得到图像的概率建模。
单独从传统Deep Learning来看,这个是老问题了,很多人认为Deep Learning就是玄学,
其实是他们没有将其与Bayesian贯通起来,熟悉Bayesian的人,不会觉得Deep Learning是毫无理论的玄学,
Hinton的RBM就是Bayesian与神经网络结合的最好例子。
回到主题,对一张猫脸的分布$P(X)$,进行normalize,
相当于得到一个后验分布:
$P(MAP)=P(X)P(NORM)$
这个后验分布是一个双刃剑:
I、一方面,它有利于训练收敛。
II、另一方面,你觉得这张猫脸会不会被扭曲?会不会少了耳朵?缺了鼻子或是眼睛?
第二点你不用猜了,对原始表征分布的破坏是必然的,这会造成模型容量的下降。
猫脸的耳朵不见了,鼻子不见了,眼睛不见了,就需要额外的W去拟合。
假设W的数量是一定的,额外的W会被其他表征竞争,就可以造成模型容量下降了。
这点可以从L2-NORM角度理解,破坏了$P(X)$之后,必然会波及到$P(W)$。
L2-NORM降低模型容量也是一个事实了。
在这点上,作者在论文里给出一个误导解释,那就是举了一个不恰当的例子:
normalize,在sigmoid当中,只会利用线性部分,在论文配图中,确实给出了证明。
这个例子本身是对的,但是用来解释表征破坏就是牵强的,
甚至在happynear的文章中就理解错了,认为逆转回去的参数$\beta$、$\gamma$,是在校正激活函数的激活范围。
实际上并不是,将normalize的$\hat{X}$逆转回去,是为了在加速收敛和表征破坏之间,留一个trade off的空间。
表征缠绕
表征之间存在着复杂的缠绕关系,这在Deep Learning和Sparse Coding中已经成为共识。
normalize之后,将对这些缠绕关系造成破坏。
用逆思维考虑,如果能够直接暴力拆掉这些缠绕,比如PCA或者ZCA,
那还要RBM或者AutoEncoder干嘛?还要Deep Learning干嘛?
在Bengio的[Learning Deep Architectures for AI]中,AutoEncoder/RBM被解释成了智能化的PCA
因为它能智能化地拆解数据的非线性缠绕关系,当然是得益于BP算法的对比误差校正。
你觉得normalize像是一个智能拆解的工具嘛?显然不是。
所以,Batch Normalization最大的亮点在于,模仿AutoEncoder/RBM,添加逆转参数,
让梯度流经过,做二次tuning,对为了追求加速收敛而造成的破坏表征,进行一次修复工作。
当然,这个修复是不可能100%完成的,正如AutoEncoder/RBM不可能由$\hat{X}$复现出$X$一样。
Covariate Shift VS Internal Covariate Shift
关于Covariate Shift,知乎已经给出了不错的解释。
但是针对Internal Covariate Shift,我们又被作者误导了。
Covariate Shift ≠ Internal Covariate Shift,前者是迁移学习问题,后者是一个训练优化问题。
正如知乎的层主所说的那样,各层添加零均值、单位方差的共轭分布,只针对数值,而不针对表征。
实际上,如果把表征也”共荣化“,那就反而糟糕了。
多层神经网络可以看作是一个迁移学习问题,层与层之间的抽象等级不同,
比如学习一只猫,经过多层神经网络抽象后,就可以迁移分裂成多个机器学习问题:
学习猫脸、学习猫腿、学习猫身、学习猫爪、学习猫尾。
如果normalize之后,这五个部分的表征分布都变一样了,那么Deep Learning不是可以废掉了?
所以说,normalize仅仅是数值层面的均衡化,以及表征层面的轻度破坏化。
Internal Covariate Shift只针对数值偏移,而Covariate Shift才针对表征偏移。
BN as a Regularizer
来自[Segedy15],也就是著名的Inception V3的观点,见第四节末:
| This also gives a weak supporting evidence for the conjecture that batch normalization acts as a regularizer. |
再从贝叶斯观点来看,BN其实没啥稀奇的,就是共轭一个高斯分布而已,自然同L2一样。
个人比较支持Segedy大神认为BN也是一个regularizer。
均衡的数值体系
Gradient Vanish
Gradient Vanish问题是深度神经网络优化的头号难题。(Bengio组证明了局部最小值有有益的)
从目前来看,造成Vanish的有两种原因,论文提了一处,就是Sigmoid函数问题。
当$X$变大时,$Sigmoid\,'(X)\rightarrow 0$ 。
考虑一下,何时$X$变大?网络从后往前时,这样,Sigmoid深度网络的梯度衰减了相当严重。
那是不是换成了ReLU,就没有Gradient Vanish了?显然你太天真了。
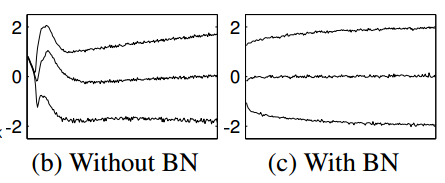
Hinton在2015年的剑桥讲座中,给了一张有趣的图,见 神经网络模型算法与生物神经网络的最新联系:
这是使用了ReLU的梯度流动图,我们可以看到,替换Sigmoid为ReLU之后,
较低层的梯度已经得到了很好的缩放了。
让我们仔细推敲一下梯度计算公式:
设$y=Wx$,则$\frac{\partial y}{\partial W}=x$
看起来没有什么问题。
当迁移到深度神经网络当中,我们又有:
$\frac{\partial l}{\partial y_{1}}\frac{\partial y_{1} }{\partial y_{2}}\frac{\partial y_{2} }{\partial y_{3}}.....\frac{\partial y_{n} }{\partial y}\frac{\partial y }{\partial W}$
化简一下:
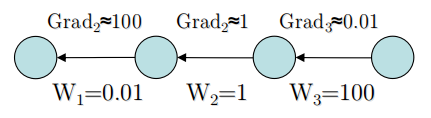
$\frac{\partial l}{\partial y_{1}}W_{1}W_{2}W_{3}.......W_{n}\frac{\partial y }{\partial W}$
中间冗长的W累积,是Gradient Vanish的真正原因,在RNN中,Gradient也有同样的问题。
以LSTM的观点来看,这大概可以视作是BP链路承载了太多冗余信息,衰减是必然的。
但LSTM使用了门控电路的方法,由神经网络嵌套神经网络,对梯度链路进行了智能裁剪,
以达到跳跃中间某些信息,到达反向传播底层的目的,详情见 Long-Short Memory Network(LSTM长短期记忆网络)
再次回到这张图:
可以看到,从W3到W1,W衰减的相当厉害,累积之后依然可以造成可观的Vanish。
这种逐层衰减有一个直接诱因,就是输入$X$波动比较厉害。
直观上来说,对于一个网络层:
I、$X$大点,$W$肯定要小点。
II、$X$小点,$W$肯定要大点。
违反这两条,会让激活值处于函数边界,从而被自然选择淘汰掉(有点遗传算法的味道)。
另一方面,从初始化方案来看,我们也能看到,对$W$的初始化范围是逐层递增的。
这是经典的大拇指规则(Rule of Thumb),由无数前辈的实验得到,似乎已经成了共识。
normalize之后,各层的$X$遭到了压制,并且向高斯分布中心进行数值收缩。
进而,由$X$影响到了$W$,$W$也向高斯分布中心进行数值收缩。
这样,$W_{1}W_{2}W_{3}.......W_{n}$的衰减将会得到可观的减缓。
这大概是Batch Normalization可以减轻使用ReLU的Gradient Vanish的直接原因。
Sigmoid
如果上一部分的推测是对的,那么可以使用Sigmoid的原因,就独立开来了。
正如论文中的那张配图:
可以看到,Sigmoid函数的输入值$X$几乎是被压制到了线性响应部分。
这时候,两端的侧抑制似乎是没有多少用的,Sigmoid已经开始向ReLU近似。
此时,$Sigmoid\,'(X)$为趋于0的可能性已经不大了。
Over Fitting
正如第一章从Beyesian角度分析一样,收缩了$P(X)$之后,也波及到$P(W)$。
$W$数值的整体量级得到了削减。
PRML读书后记(一): 拟合学习、关于过拟合、局部最小值、以及Poor Generalization的思考中,
给出了维数灾难形象描述。
$W$的数值收缩,从维数灾难角度理解,撇开降维这种暴力方法,一定程度上可以减轻过拟合问题。
Learning Rate
论文中应该给出的是稍大,而不是无限大。
事实上,你要是给个比较大的学习率,还是会导致目标函数发散。
包括在训练后期,你要不把学习率降低量级,训练有很大可能从函数谷面跑飞过去了。(亲测)
个人推测,应该是$X$、$W$、$Gradient$被均衡后,量级得到收缩,允许稍大的学习率存在。
二阶近似优化方案,ADADELTA以及RMSPROP,免除人工干扰学习率的困扰。
ADADELTA详细参考:自适应学习率调整:AdaDelta
Dropout
从我实际测试来看,非常不鼓励扔掉Dropout。
Batch Norm根本压不住大模型在训练后期的过拟合。
我甚至还是保留着50%的Dropout,速度也还不错。
Dropout的两个作用:稀疏与动态平均,不仅从数值上抑制过拟合。
在表征训练方面,也有一定的regularize效果。
编程技巧
BN有两种写法,合并式和分离式。
Caffe master branch采用的是分离式写法,CONV层扔掉bias,接一个BN层,再接一个带bias的SCALE层。
我个人更推崇合并式写法,这样在深度网络定义文件中,可以不用眼花缭乱。
从执行速度来看,合并式写法需要多算一步bias;
分离式写法,在切换层传播时,OS需要执行多个函数,在底层(比如栈)调度上会浪费一点时间。
可以说,各有优劣。默认推荐https://github.com/ducha-aiki/caffe的合并式写法。
分离式写法,见官方master branch。
代码
默认实现在我的Dragon框架下,只提供GPU代码,Caffe稍作修改即可,CPU也稍作修改即可。
(注意dragon_copy和caffe的是相反的)
https://github.com/neopenx/Dragon/blob/master/Dragon/layer_include/common_layers.hpp
https://github.com/neopenx/Dragon/blob/master/Dragon/layer_src/batch_norm_layer.cpp
(forward、backward是错的,参考cu文件里的写法)
https://github.com/neopenx/Dragon/blob/master/Dragon/layer_src/batch_norm.cu
还有proto:
message BatchNormParameter{ optional bool use_global_stats=1 [default=true]; optional float decay=3 [default=0.95]; optional float eps=2 [default=1e-10]; } message LayerParameter{ ....... optional BatchNormParameter batch_norm_param=xxx; ....... }
精度eps推荐1e-10,1e-5在cifar10中已经过大了。
$\beta$、$\gamma$的初始化
论文里没说,https://github.com/ducha-aiki/caffe/blob/elu/examples/BN-nator.ipynb中给出的方案是:
$\beta$为常数0.0000001,$\gamma$为常数1.0000001
我测了几次,发现用0和1的效果好像随机出来不是很好,推测是精度问题?还是我人品太差了?
全局统计测试
论文默认推荐是开启全局统计测试,也就是记录每次batch的均值和方差。
在测试的时候,用累积和的期望值。无偏估计的系数可以忽略,意义不大。
我与ducha-aiki的方案不同之处,在于用blob[4]记录总batch数量,
在训练的时候,利用:
(均值*数量+新值)/(数量+1)来更新
在测试的时候,直接copy过来,然后做norm。
在cifar10测试中,我发现,对于batch为100的验证集,精度会比不做全局统计差很多。
可能是,训练次数过低,导致的全局统计值不是很稳定。
在追加了一定训练次数之后,在cifar10 quick epoch12时,
差距仍然达到了8%,(66% vs 74%)。
所以不推荐在测试数据充裕的情况下,做全局统计测试,往往会得到不好的结果。(写论文注意)
相反,对于实际使用的时候,测试数据就几个,这时候做一做效果还是可以的。
不过还是看人品,没准就偏移大了,不准了,这大概是Batch Norm唯一不好的地方吧。
—————————————————————————————————————————————————
在epoch达到60后,这种方法的测试精度已经退化到40%了。
仔细想了一下,发现做纯平均是错的,因为前后更新的重要度不一样。
一般我们认为,最新更新的比较重要。
所以改用ducha-aiki的moving average decay的方案。
设置decay=0.95,
每次更新的时候,最新量0.95+0.05*history,这种平均比纯平均期望意义更大。
后者在训练末期,数值体系已经被纯平均搞得崩溃了。
使用这种滑动平均期望后,默认的验证和测试,开启全局统计就没问题了。
随机抖动
使用Batch Norm之后,每次跑程序的时候,在初期,训练似然和验证精度都有很大的变化。
有时候特别好,有时候特别差,相当不稳定。
推测应该是normalize之后,放大了随机初始化的差异问题,这个在写代码debug的时候需要注意。
多测几次,不要误判为bug。
适用范围
在https://github.com/ducha-aiki/caffe/blob/elu/examples/BN-nator.ipynb中,
我们可以看到,所有CONV和INNER_PRODUCT层都是可以做Batch Norm的。
实际测试的时候,因为波动、以及层数少的问题,没发现什么异常。
用法如下(不要像激活函数那样用成in-place):
layer{ name:"bn1" type:"BatchNorm" bottom:"conv1" top:"bn1" }
—————————————————————————————————————————————————
由于INNER_PRODUCT层后一般习惯接DROPOUT,而且INNER_PRODUCT一般处于反向链式
前端,所以INNER_PRODUCT上的Batch Norm可能显得多余,我用浅层模型没有测出来较大的差异。
计算代价
注意论文中的:
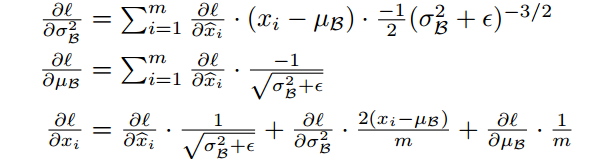
在实现的时候,是可以优化的,主要是提取公因子,x_norm.diff、-1/m,以及sqrt(..)项都可以提出来。
具体需要仔细琢磨,x_norm.diff计算出来之后,下面那几段收缩、扩展的代码,相当经典。
尽管如此,Batch Norm的计算代价还是相当大的,我觉得比卷积层还大。
所以CPU党可以不用尝试了,逐层Batch Norm实在是太慢了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号