


本文是mavros的wiki官网的阅读指南。
本文参考:https://blog.csdn.net/z1872385/article/details/119904982
mavros-ROS wiki官网: http://wiki.ros.org/mavros#mavros.2BAC8-Plugins.sys_status
点击需要查询的指令
此处以飞行器位姿的指令为例,指令介绍中的publish意为:程序对外发布,订阅该节点的PX4可接受并仿真中显示(目前的猜测,之后会思考)。
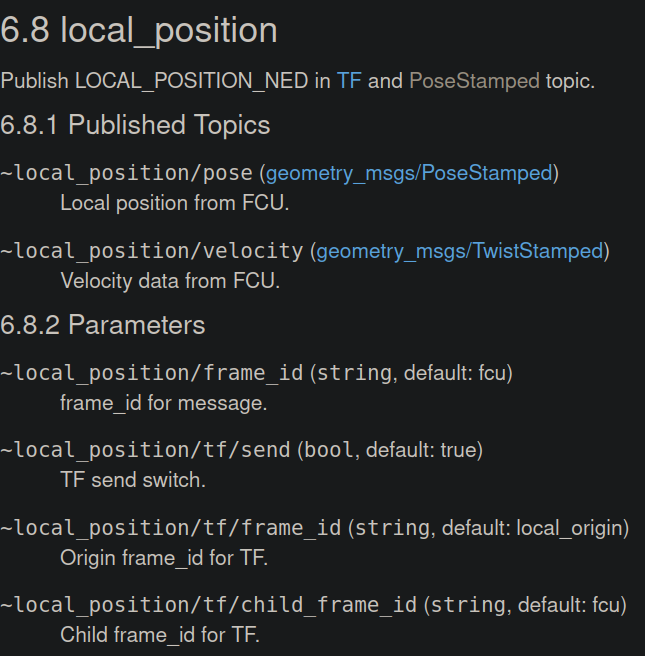
指令的结构
- 可以看到,geometry_msgs::PoseStamped包含header和pose
- 使用该话题需引用头文件:
#include <geometry_msgs/PoseStamped.h>
这是参考图中File中的内容。

指令的使用
- 点击浅蓝色字体链接进入std_msgs/Header页面
![]()
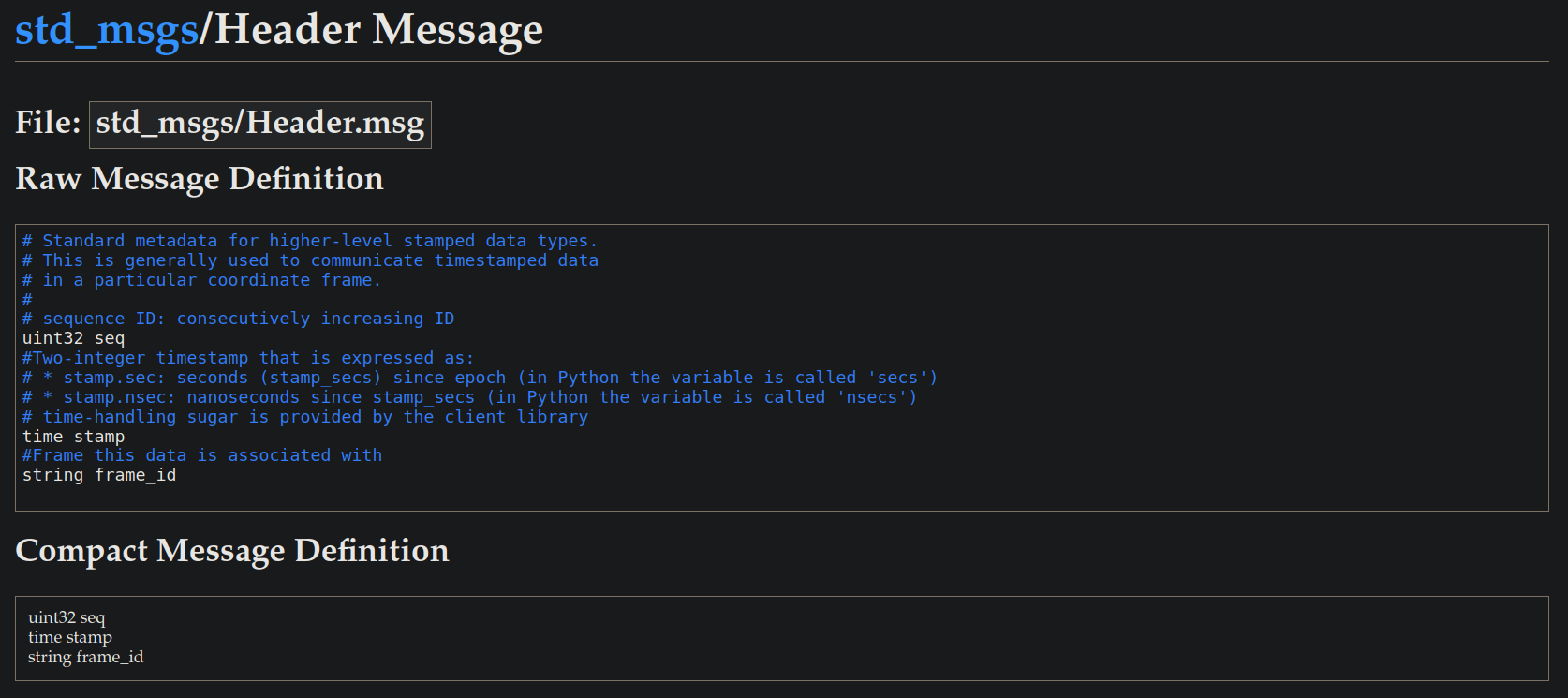
- 可知header有三个参数,具体使用参考官网介绍,此处给出使用的举例:
geometry_msgs::PoseStamped msg
msg.header.stamp = ros::Time::now()
double store_time;
store_time = msg.header.stamp.sec + 1e-9*msg.header.stamp.nsec; //unit s
//or
store_time = msg.header.stamp.sec * 1e9 + msg.header.stamp.nsec; //unit ns
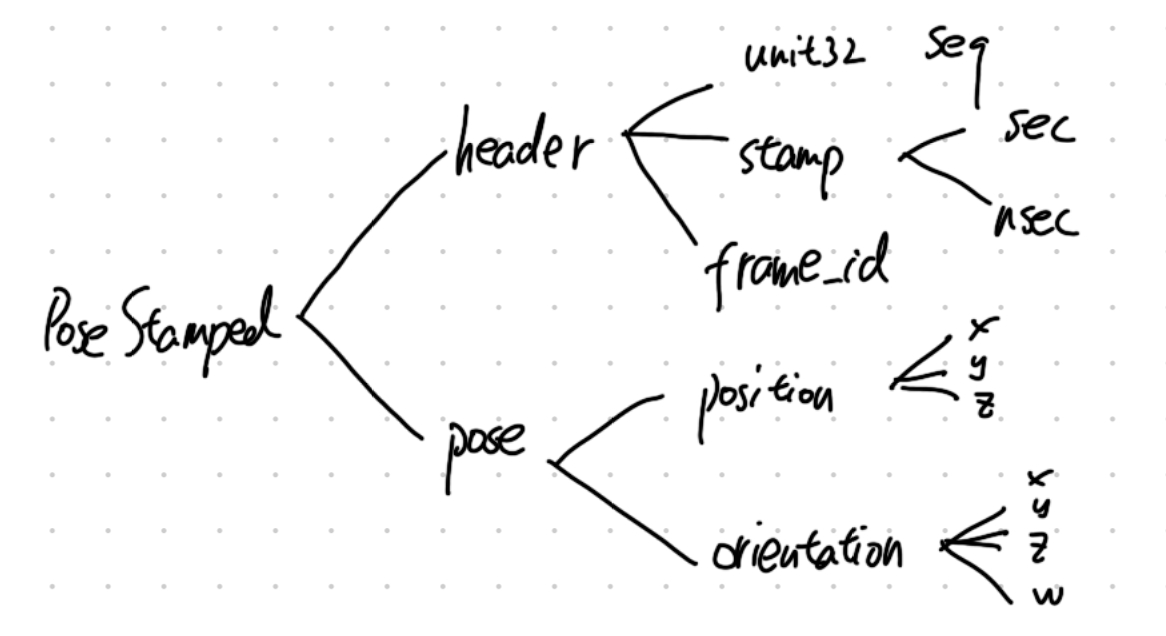
- 返回上级目录后,点击浅蓝色geometry_msgs/Pose,查阅pose的使用指南。
- 此时,可以看到PoseStamped的结构如图所是:
![]()
附加
如果没有在ros index搜索后的页面中看到使用介绍,点击右侧的msg_api。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号