
使用梯度下降方法求解凸优化问题的时候,会遇到一个问题,选择什么样的梯度下降步长才合适。
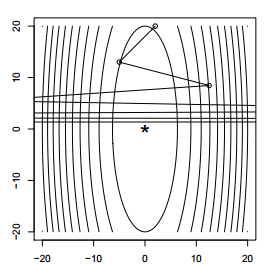
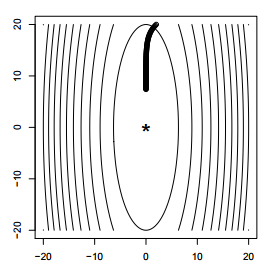
假设优化函数为 ,若每次梯度下降的步长都固定,则可能出现左图所示的情况,无法收敛。若每次步长都很小,则下降速度非常慢,需要很多轮的迭代,如右图所示。所以步长的选择和收敛速度是一个取舍关系。
,若每次梯度下降的步长都固定,则可能出现左图所示的情况,无法收敛。若每次步长都很小,则下降速度非常慢,需要很多轮的迭代,如右图所示。所以步长的选择和收敛速度是一个取舍关系。
于是,有了一种可调节步长的解法,称为backtracking line search。
假设我们当前的位置为Xc 并且要在d方向上寻找更优的解,那么问题就变为了估计Φ(t)的最小值,t是步长。

关于P的新的解是 。那么怎么来估计这个步长呢?(直接把课件的幻灯片贴上来了)
。那么怎么来估计这个步长呢?(直接把课件的幻灯片贴上来了)
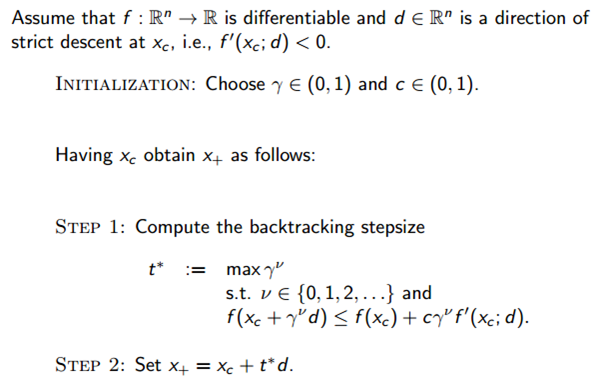
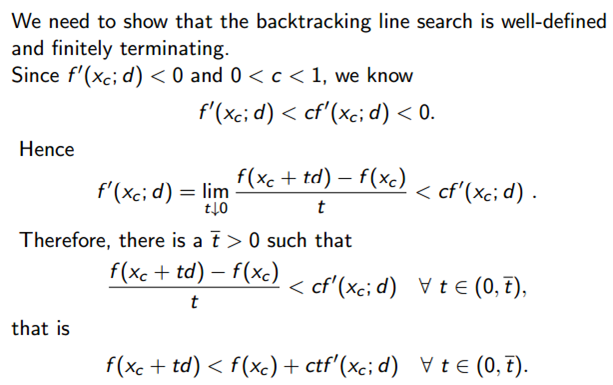
也就是说,设f(x)在Xc的导数 ,再设两个变量r和c∈(0, 1).
,再设两个变量r和c∈(0, 1).
因为r∈(0, 1),所以rv随着v的增大而趋向于0,也就是步长t逐渐减小,直到找到满足 条件的rv。之前已经设定了
条件的rv。之前已经设定了 ,所以必定有
,所以必定有

课件里给出了一段Matlab的伪代码,翻译过来差不多就是这样
function t = BLS(f,d,x,r,c) % Backtracking line search % Input : % f: MATLAB file that returns function value % d: The search direction % x: current x % r : backtrack step between (0,1) usually 1/2 % c: (0,1) usually 10^{-4} % Output : % t: adaptive step length [fc, gc] = feval(f,x); xc = x; x = xc + t*d; fk1 = feval(f,x);
t = 1;
while fk1 > fk + c*t*(gk'*d)
t= t*r;
x = xc + t*d;
fk1 = feval(f,x);
end
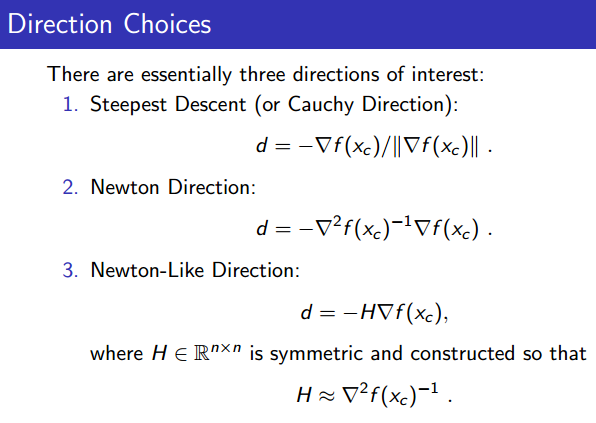
最后,课件里给出了寻找方向d的几种方法
参考资料:
http://www.stat.cmu.edu/~ryantibs/convexopt/lectures/05-grad-descent.pdf
https://www.math.washington.edu/~burke/crs/408/lectures/L7-line-search.pdf

 浙公网安备 33010602011771号
浙公网安备 33010602011771号