
利用脉冲位宽调制技术和一级滤波电路实现正弦波输出
利用PWM和RC滤波电路输出正弦波
流程图
- 主程序
![img]()
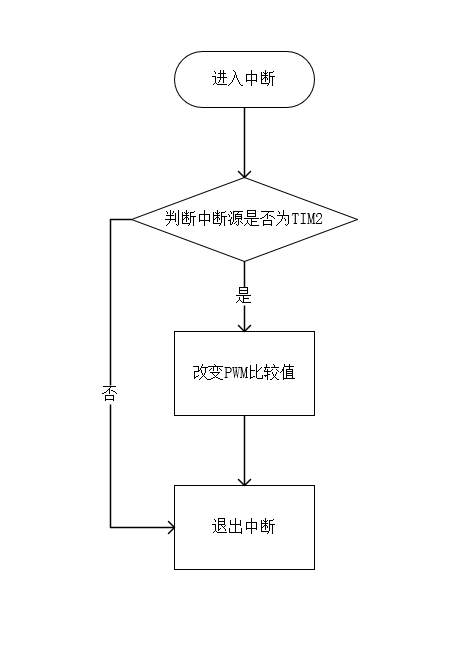
- 中断部分
![img]()
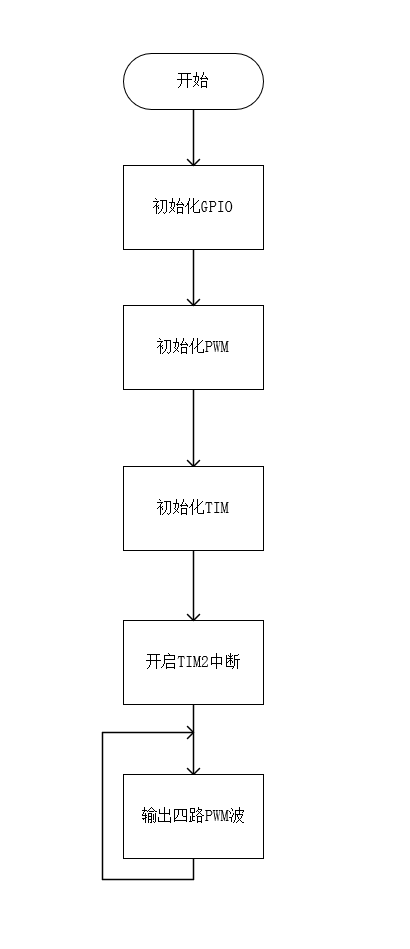
1、初始化硬件
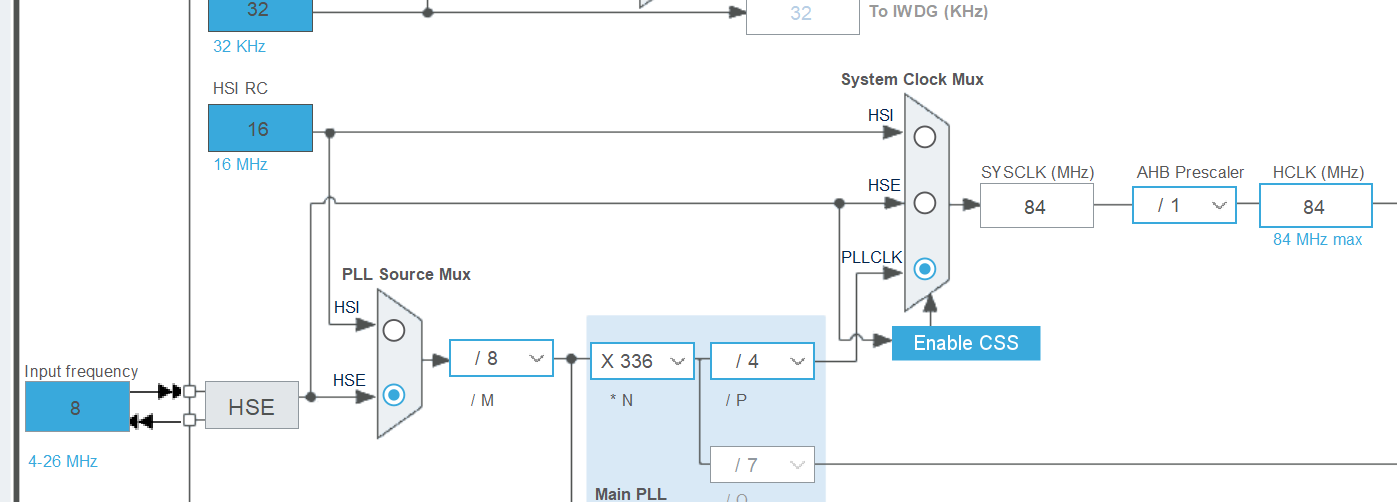
(1)时钟

- 使能
RCC,选择外部高速晶振
![img]()
- 将
HCLK配置为最大的84MHz
(2)PWM
- 使能
TIM1,将PWM设为20KHz,将死区设置为25ns
![img]()
- 注意:为防止开关不同步导致的短路,需要设置“死区”
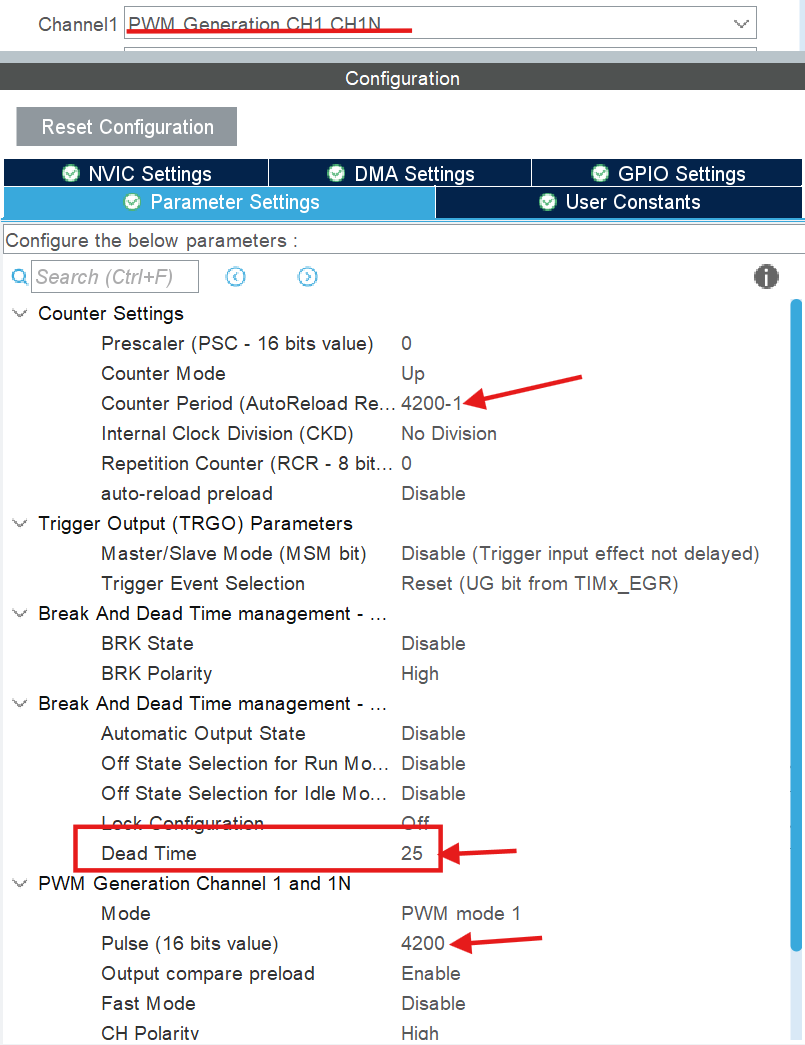
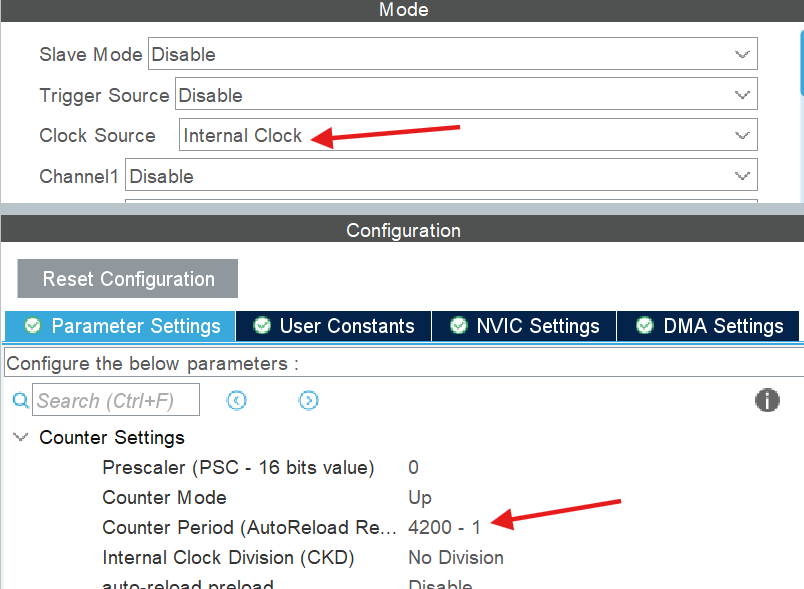
PWM频率计算公式:\(频率 = \frac{计时器频率}{(预分频 + 1) \times (重装载值 + 1)}\)
此时计时器频率为84MHz,预分频数值为0,重装载值为4199,所以PWM频率为20KHz
(3)TIM
- 将
TIM2的时钟源设置为内部时钟,重装载值设置为4199
![img]()
- 使能
TIM2中断
![img]()

(4)代码部分
- 在主循环外部对
TIM进行初始化
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);//开启定时器2中断
HAL_TIM_PWM_Start (&htim1,TIM_CHANNEL_1);//开启四路pwm波
HAL_TIMEx_PWMN_Start (&htim1,TIM_CHANNEL_1);
/* USER CODE END 2 */
2、写入代码
(1)启用TIM
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);//开启定时器2中断
HAL_TIM_PWM_Start (&htim1,TIM_CHANNEL_1);//开启四路pwm波
HAL_TIMEx_PWMN_Start (&htim1,TIM_CHANNEL_1);
(2)回调函数
- 在主函数外侧定义中断回调
/* USER CODE BEGIN PM */
uint16_t spwmcnt=0;//数组计数值:0~399;
float M=0.8;//调制比M:0~1
int spwm_group[400]={
33,99,165,231,297,362,428,494,559,624,690,755,819,884,948,1013,1076,
1140,1203,1266,1329,1392,1454,1515,1577,1638,1698,1758,1818,1877,1936,1994,2052,
2110,2166,2223,2278,2333,2388,2442,2495,2548,2600,2652,2703,2753,2802,2851,2899,
2946,2993,3039,3084,3129,3172,3215,3257,3298,3339,3378,3417,3455,3492,3528,3564,
3598,3632,3664,3696,3727,3757,3786,3814,3841,3868,3893,3917,3940,3963,3984,4005,
4024,4042,4060,4076,4092,4106,4119,4132,4143,4153,4163,4171,4178,4184,4190,4194,
4197,4199,4200,4200,4199,4197,4194,4190,4184,4178,4171,4163,4153,4143,4132,4119,
4106,4092,4076,4060,4042,4024,4005,3984,3963,3940,3917,3893,3868,3841,3814,3786,
3757,3727,3696,3664,3632,3598,3564,3528,3492,3455,3417,3378,3339,3298,3257,3215,
3172,3129,3084,3039,2993,2946,2899,2851,2802,2753,2703,2652,2600,2548,2495,2442,
2388,2333,2278,2223,2166,2110,2052,1994,1936,1877,1818,1758,1698,1638,1577,1515,
1454,1392,1329,1266,1203,1140,1076,1013,948,884,819,755,690,624,559,494,
428,362,297,231,165,99,33,-33,-99,-165,-231,-297,-362,-428,-494,-559,
-624,-690,-755,-819,-884,-948,-1013,-1076,-1140,-1203,-1266,-1329,-1392,-1454,-1515,-1577,
-1638,-1698,-1758,-1818,-1877,-1936,-1994,-2052,-2110,-2166,-2223,-2278,-2333,-2388,-2442,-2495,
-2548,-2600,-2652,-2703,-2753,-2802,-2851,-2899,-2946,-2993,-3039,-3084,-3129,-3172,-3215,-3257,
-3298,-3339,-3378,-3417,-3455,-3492,-3528,-3564,-3598,-3632,-3664,-3696,-3727,-3757,-3786,-3814,
-3841,-3868,-3893,-3917,-3940,-3963,-3984,-4005,-4024,-4042,-4060,-4076,-4092,-4106,-4119,-4132,
-4143,-4153,-4163,-4171,-4178,-4184,-4190,-4194,-4197,-4199,-4200,-4200,-4199,-4197,-4194,-4190,
-4184,-4178,-4171,-4163,-4153,-4143,-4132,-4119,-4106,-4092,-4076,-4060,-4042,-4024,-4005,-3984,
-3963,-3940,-3917,-3893,-3868,-3841,-3814,-3786,-3757,-3727,-3696,-3664,-3632,-3598,-3564,-3528,
-3492,-3455,-3417,-3378,-3339,-3298,-3257,-3215,-3172,-3129,-3084,-3039,-2993,-2946,-2899,-2851,
-2802,-2753,-2703,-2652,-2600,-2548,-2495,-2442,-2388,-2333,-2278,-2223,-2166,-2110,-2052,-1994,
-1936,-1877,-1818,-1758,-1698,-1638,-1577,-1515,-1454,-1392,-1329,-1266,-1203,-1140,-1076,-1013,
-948,-884,-819,-755,-690,-624,-559,-494,-428,-362,-297,-231,-165,-99,-33,
};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) //中断回调函数 20k
{
if(htim==&htim2)
{
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, (4200.f + M*spwm_group[spwmcnt]) / 2.0f);//频率算错了,20kHz频率改变200次20000 / 200 = 100Hz的正弦波,因此占空比整体除2
spwmcnt++;
if(spwmcnt==400)spwmcnt=0;
}
}
/* USER CODE END PM */
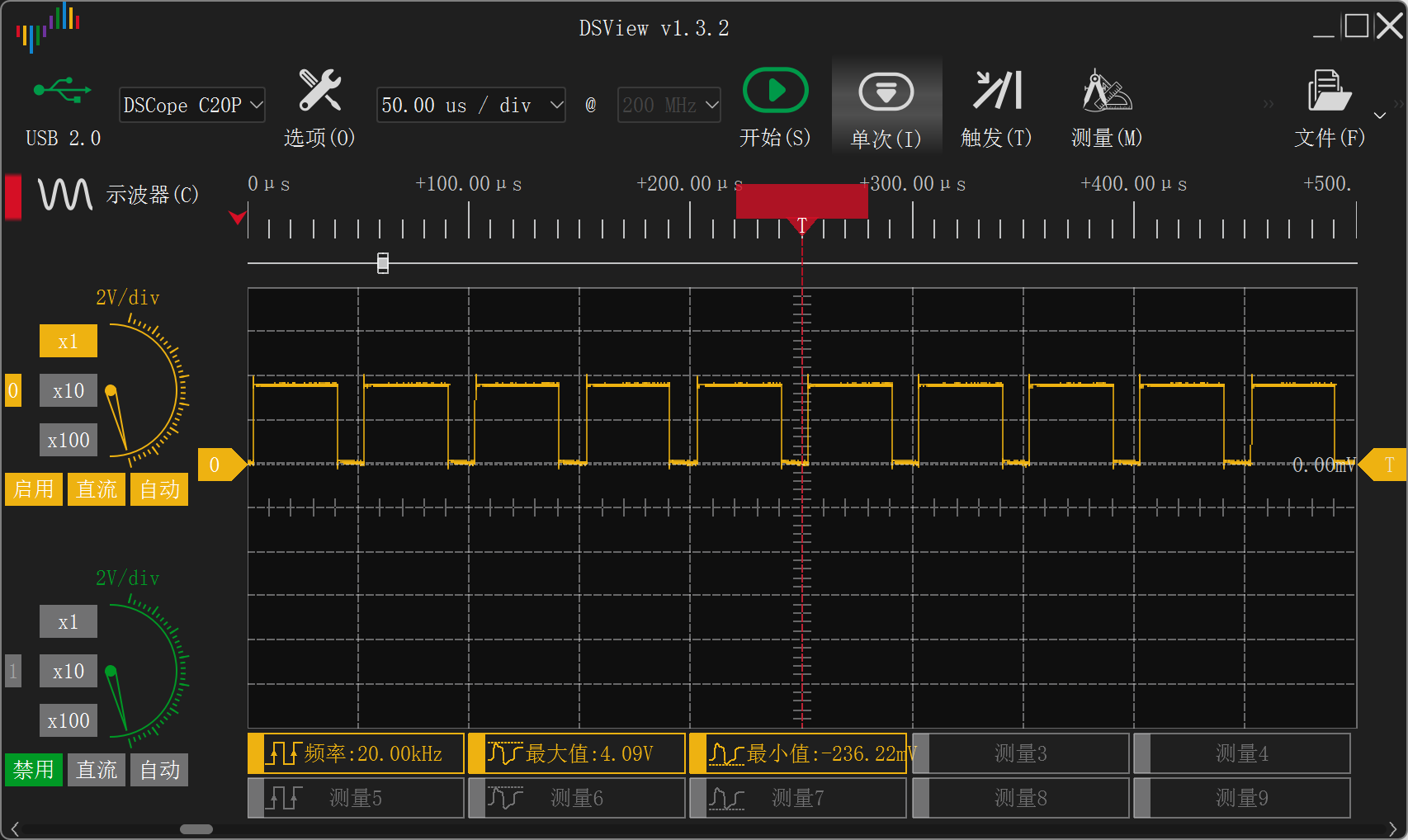
(3)验证
- 先关闭中断,设定一个固定比较值,用示波器观察PWM波周期是否符合要求,确认无误后,可进行后续步骤
在CubeMX中将TIM2的中断选项取消勾选再生成代码

I 验证的代码部分
- 在主循环外侧写入以下内容:
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 1000);//设置固定比较值为1000
/* USER CODE END 2 */
II 示波器采样结果
PWM通道
![img]()
PWM互补通道
![img]()

3、滤波电路
- 在完成验证后,可重新开启中断,并删除验证部分代码
(1)计算规格
- 已知方波频率为20kHz,所以RC滤波电路的截止频率\(f_c\)应该为10kHz ~ 2kHz
- 根据\(f_c = \frac{1}{2\pi \times R \times C}\)以及手头得器件进行选择
由于我实验室没有合适的零件,所以选择2个10Ω的电阻串联等效,1个2.2\(\mu F\)的电容和1个1.0\(\mu F\)的电容并联等效
由公式得,截止频率为\(f_c = \frac{1}{2\pi \times 10 \Omega \times 2 \times (2.2 \mu + 1.0 \mu)} = 2,486.79 Hz\)
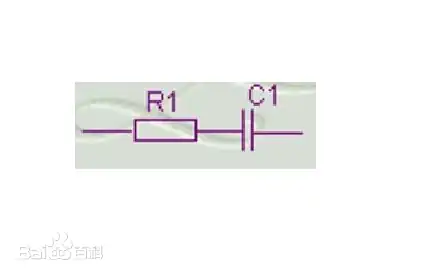
(2) 搭建滤波电路
- 依照下图进行搭建,电阻侧接信号源,电容接地
![img]()
![img]()
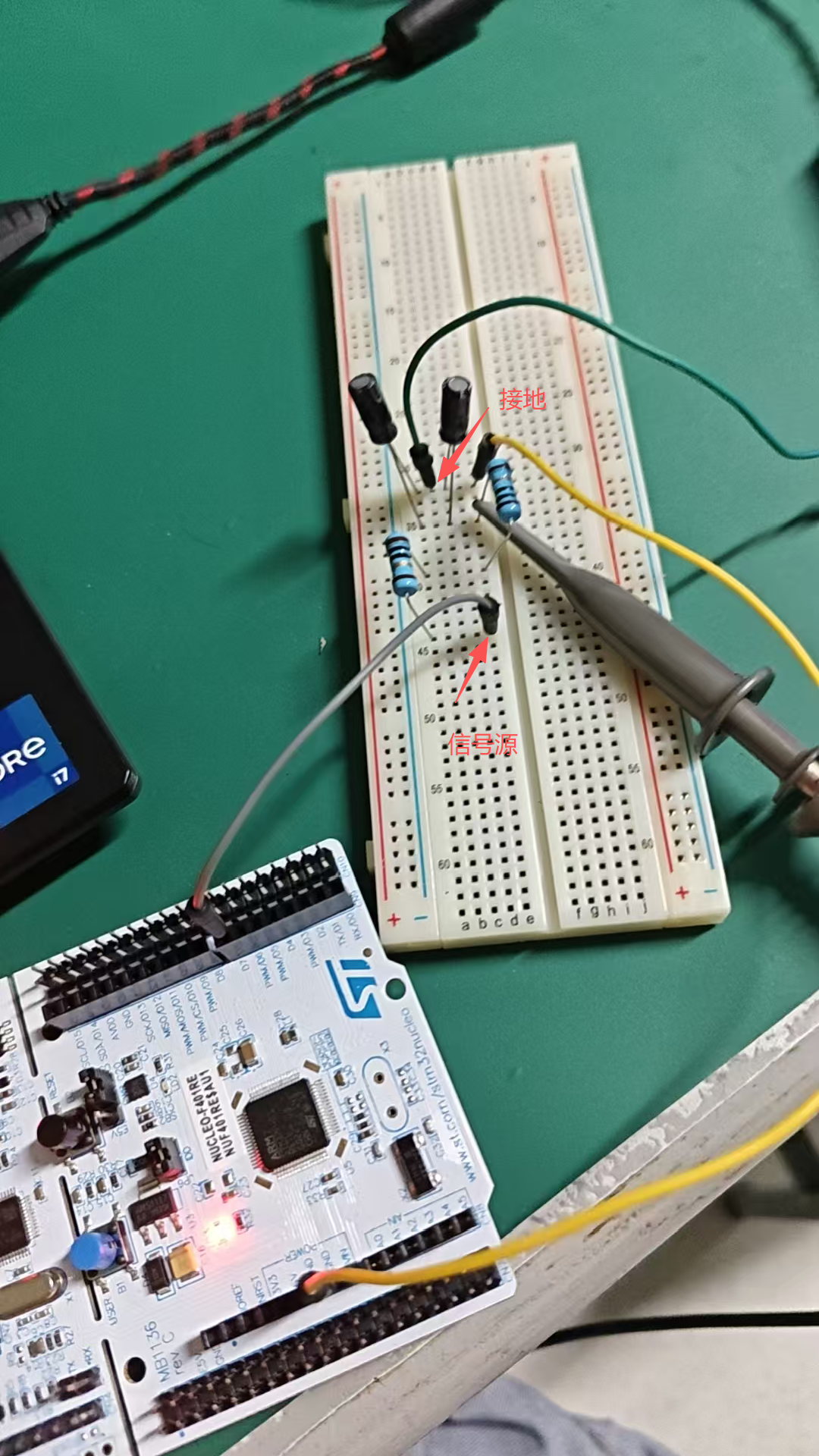
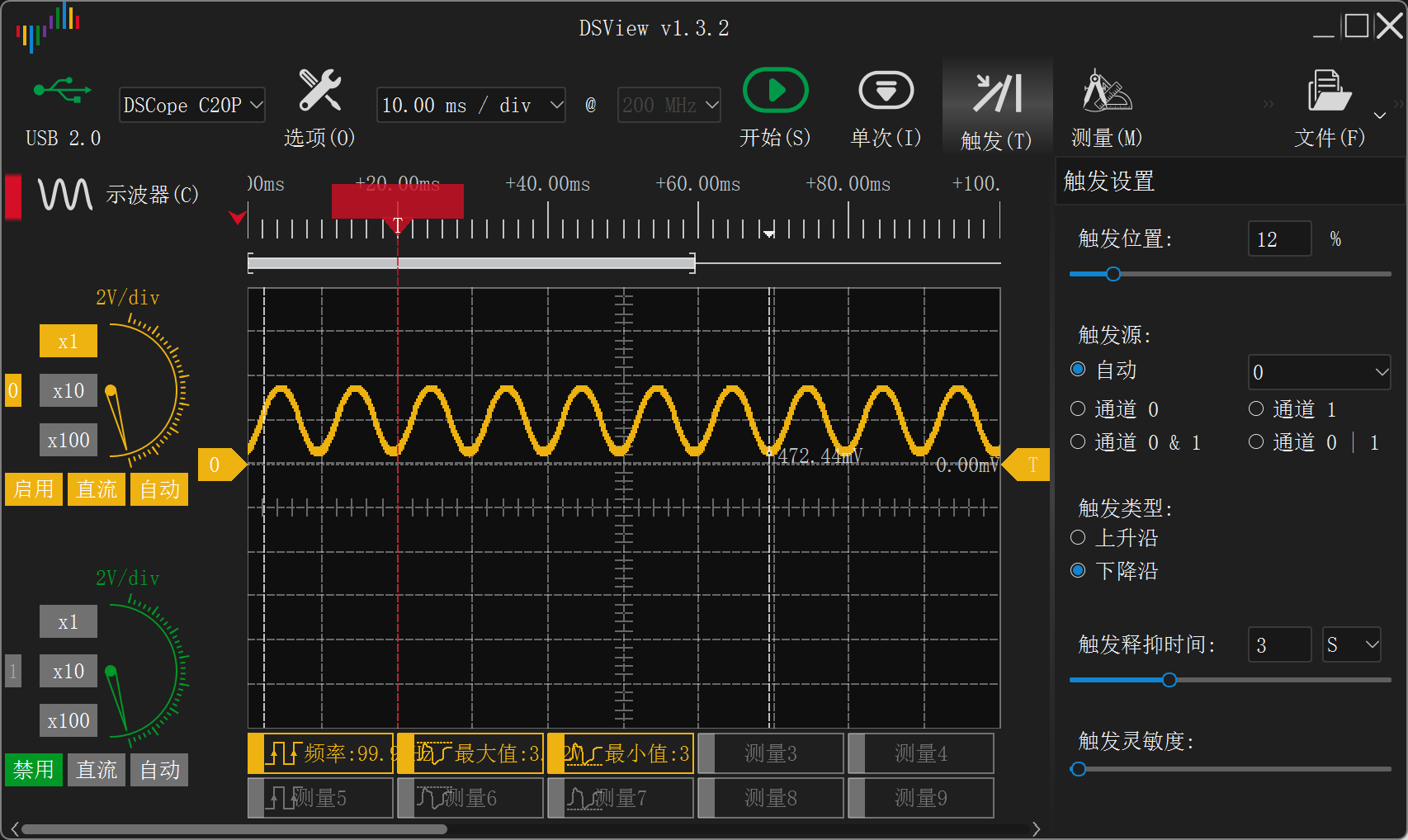
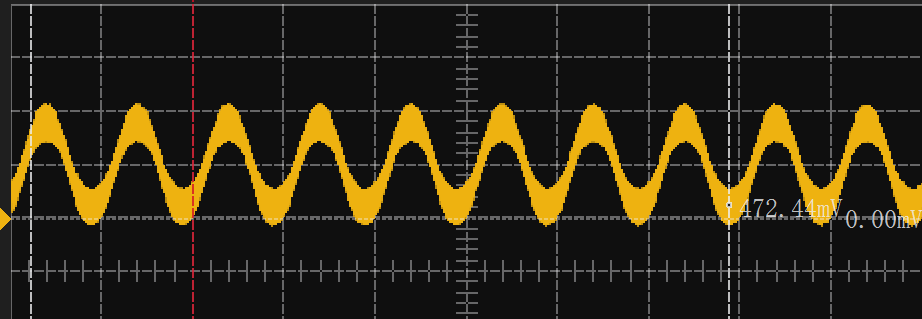
3、测试信号
- 将示波器鳄鱼夹处夹在电容接地端,笔头接入电容与电阻之间,便能看到正弦波信号
![img]()
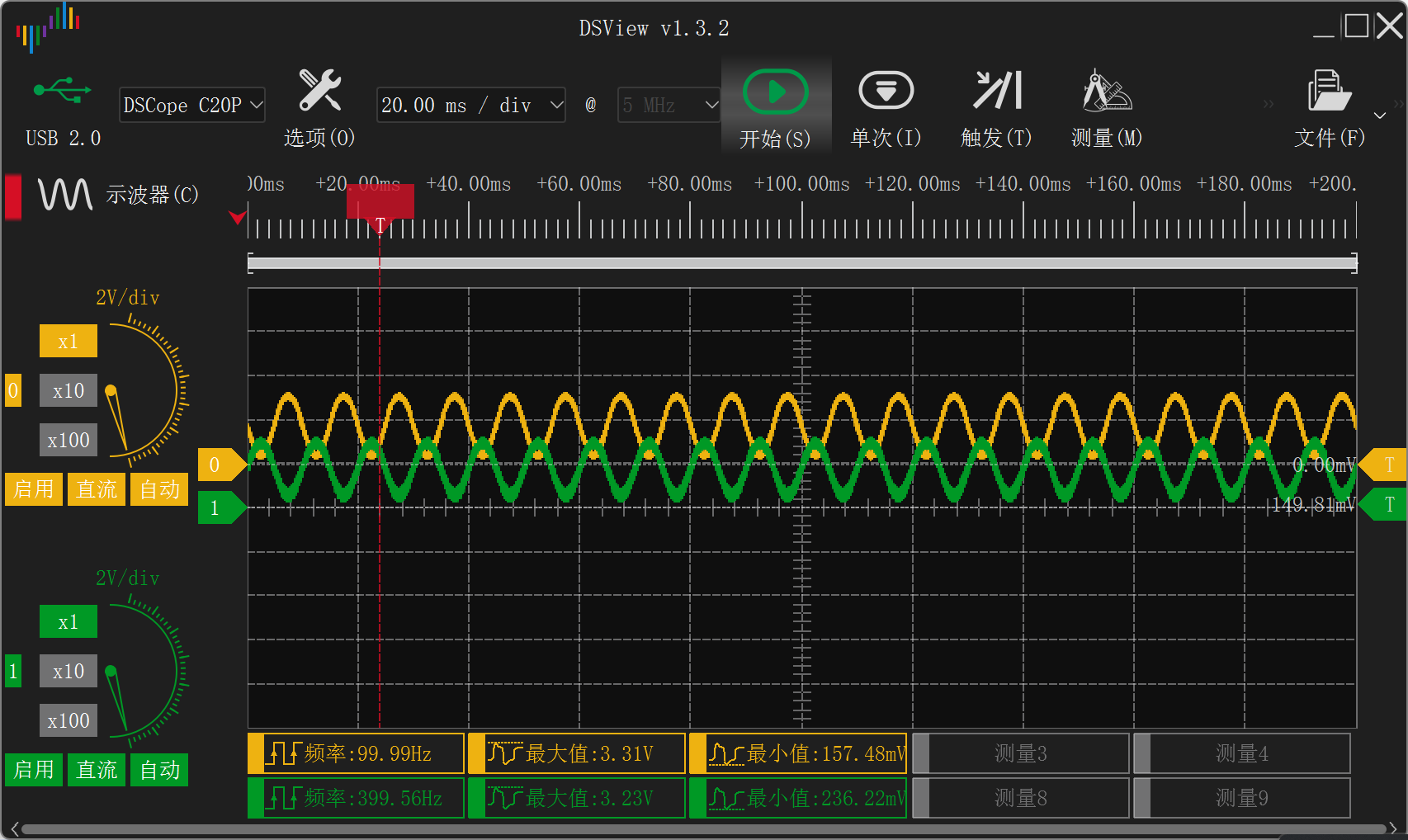
- 分别测量PWM输出通道和PWM互补通道得滤波信号,可得到一对互补的正弦波信号
![img]()
4、注意事项
电容
- 如果是使用的点解电容,请注意电容极性与电流方向匹配
采样接地端
- 请注意将示波器表笔的接地端直接接在电容接地端,若接入开发板的接地端可能会受到其他信号的干扰
接入开发板总地线的效果,可见干扰明显增大
死区
- 注意将
TIM模块设置为"生成互补PWM"模式时,要开启死区保护电路,防止短路
5、代码清单
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
uint16_t spwmcnt=0;//数组计数值:0~399;
float M=0.8;//调制比M:0~1
int spwm_group[400]={
33,99,165,231,297,362,428,494,559,624,690,755,819,884,948,1013,1076,
1140,1203,1266,1329,1392,1454,1515,1577,1638,1698,1758,1818,1877,1936,1994,2052,
2110,2166,2223,2278,2333,2388,2442,2495,2548,2600,2652,2703,2753,2802,2851,2899,
2946,2993,3039,3084,3129,3172,3215,3257,3298,3339,3378,3417,3455,3492,3528,3564,
3598,3632,3664,3696,3727,3757,3786,3814,3841,3868,3893,3917,3940,3963,3984,4005,
4024,4042,4060,4076,4092,4106,4119,4132,4143,4153,4163,4171,4178,4184,4190,4194,
4197,4199,4200,4200,4199,4197,4194,4190,4184,4178,4171,4163,4153,4143,4132,4119,
4106,4092,4076,4060,4042,4024,4005,3984,3963,3940,3917,3893,3868,3841,3814,3786,
3757,3727,3696,3664,3632,3598,3564,3528,3492,3455,3417,3378,3339,3298,3257,3215,
3172,3129,3084,3039,2993,2946,2899,2851,2802,2753,2703,2652,2600,2548,2495,2442,
2388,2333,2278,2223,2166,2110,2052,1994,1936,1877,1818,1758,1698,1638,1577,1515,
1454,1392,1329,1266,1203,1140,1076,1013,948,884,819,755,690,624,559,494,
428,362,297,231,165,99,33,-33,-99,-165,-231,-297,-362,-428,-494,-559,
-624,-690,-755,-819,-884,-948,-1013,-1076,-1140,-1203,-1266,-1329,-1392,-1454,-1515,-1577,
-1638,-1698,-1758,-1818,-1877,-1936,-1994,-2052,-2110,-2166,-2223,-2278,-2333,-2388,-2442,-2495,
-2548,-2600,-2652,-2703,-2753,-2802,-2851,-2899,-2946,-2993,-3039,-3084,-3129,-3172,-3215,-3257,
-3298,-3339,-3378,-3417,-3455,-3492,-3528,-3564,-3598,-3632,-3664,-3696,-3727,-3757,-3786,-3814,
-3841,-3868,-3893,-3917,-3940,-3963,-3984,-4005,-4024,-4042,-4060,-4076,-4092,-4106,-4119,-4132,
-4143,-4153,-4163,-4171,-4178,-4184,-4190,-4194,-4197,-4199,-4200,-4200,-4199,-4197,-4194,-4190,
-4184,-4178,-4171,-4163,-4153,-4143,-4132,-4119,-4106,-4092,-4076,-4060,-4042,-4024,-4005,-3984,
-3963,-3940,-3917,-3893,-3868,-3841,-3814,-3786,-3757,-3727,-3696,-3664,-3632,-3598,-3564,-3528,
-3492,-3455,-3417,-3378,-3339,-3298,-3257,-3215,-3172,-3129,-3084,-3039,-2993,-2946,-2899,-2851,
-2802,-2753,-2703,-2652,-2600,-2548,-2495,-2442,-2388,-2333,-2278,-2223,-2166,-2110,-2052,-1994,
-1936,-1877,-1818,-1758,-1698,-1638,-1577,-1515,-1454,-1392,-1329,-1266,-1203,-1140,-1076,-1013,
-948,-884,-819,-755,-690,-624,-559,-494,-428,-362,-297,-231,-165,-99,-33,
};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) //中断回调函数 20k
{
if(htim==&htim2)
{
// TIM1->CCR1 = (4200.f + M*spwm_group[spwmcnt]) / 2.0f ;//20khz的频率改变400次,20000/400=50hz的正弦波;
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, (4200.f + M*spwm_group[spwmcnt]) / 2.0f);
spwmcnt++;
if(spwmcnt==400)spwmcnt=0;
}
}
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);//开启定时器2中断
HAL_TIM_PWM_Start (&htim1,TIM_CHANNEL_1);//开启四路pwm波
HAL_TIMEx_PWMN_Start (&htim1,TIM_CHANNEL_1);
// __HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 1000);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */

 浙公网安备 33010602011771号
浙公网安备 33010602011771号