
异步串口通讯
串口通讯
1、简介
- 串行接口是一种可以将接收来自CPU的并行数据字符转换为连续的串行数据流发送出去,同时可将接收的串行数据流转换为并行的数据字符供给CPU的器件。一般完成这种功能的电路,我们称为串行接口电路。
串口通信(Serial Communications)的概念非常简单,串口按位(bit)发送和接收字节的通信方式。
2、实现方式
(1)初始化设备
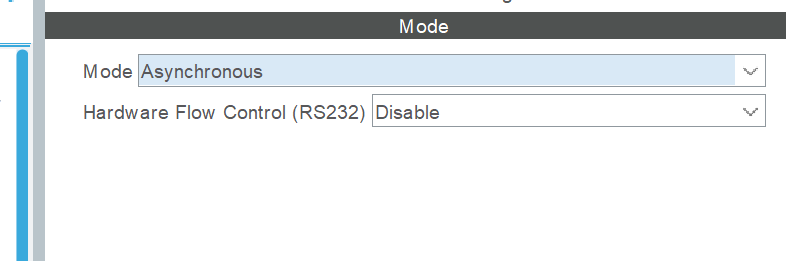
- 将USART2改为"异步通讯"模式,其余保持默认
![图片]()
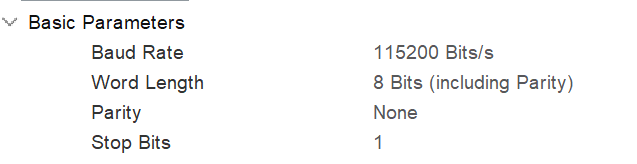
注意串口工具的配置要和硬件保持一致:
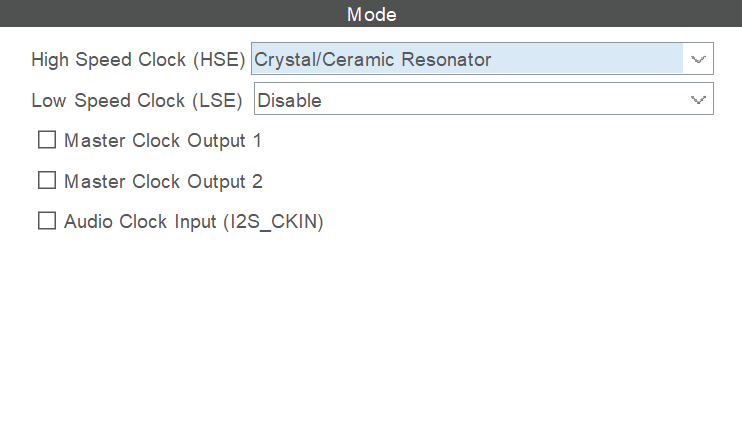
- 使能RCC,选择HSE
![图片]()
- 将按钮设置为"外部中断上升沿模式",触发为"上拉"
![图片]()

(2)写入代码
I 控制小灯
- 引入
<string.h>头文件,以便输出字符串
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
/* USER CODE END Includes */
- 定义接收数据用的字符串
/* USER CODE BEGIN 2 */
uint8_t ReceivedData[1];
/* USER CODE END 2 */
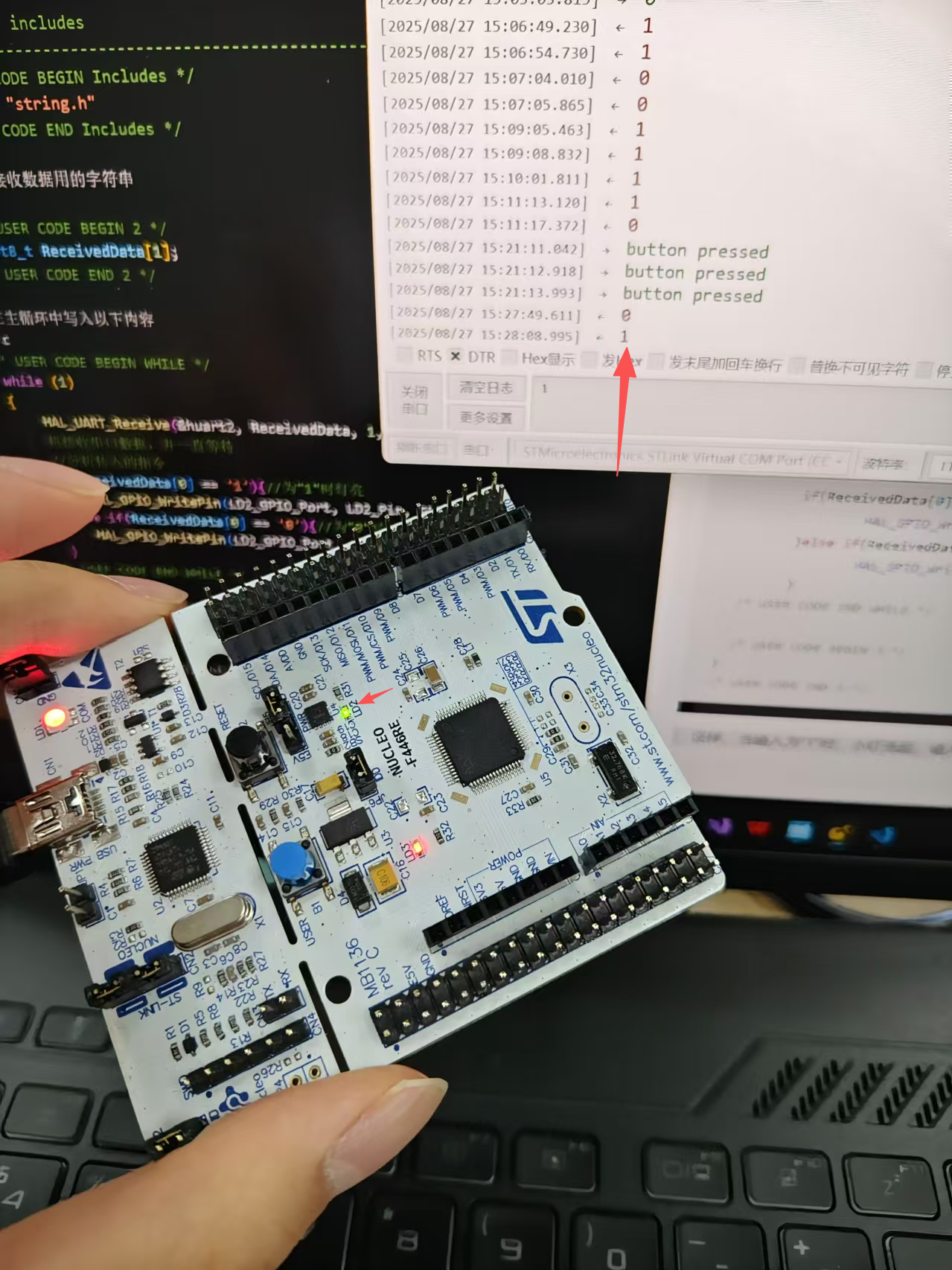
- 在主循环中写入以下内容
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_UART_Receive(&huart2, ReceivedData, 1,HAL_MAX_DELAY);//让单片机接收串口数据,并一直等待
//分析传入的指令
if(ReceivedData[0] == '1'){//为"1"时灯亮
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_SET);
}else if(ReceivedData[0] == '0'){//为"0"时灯灭
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
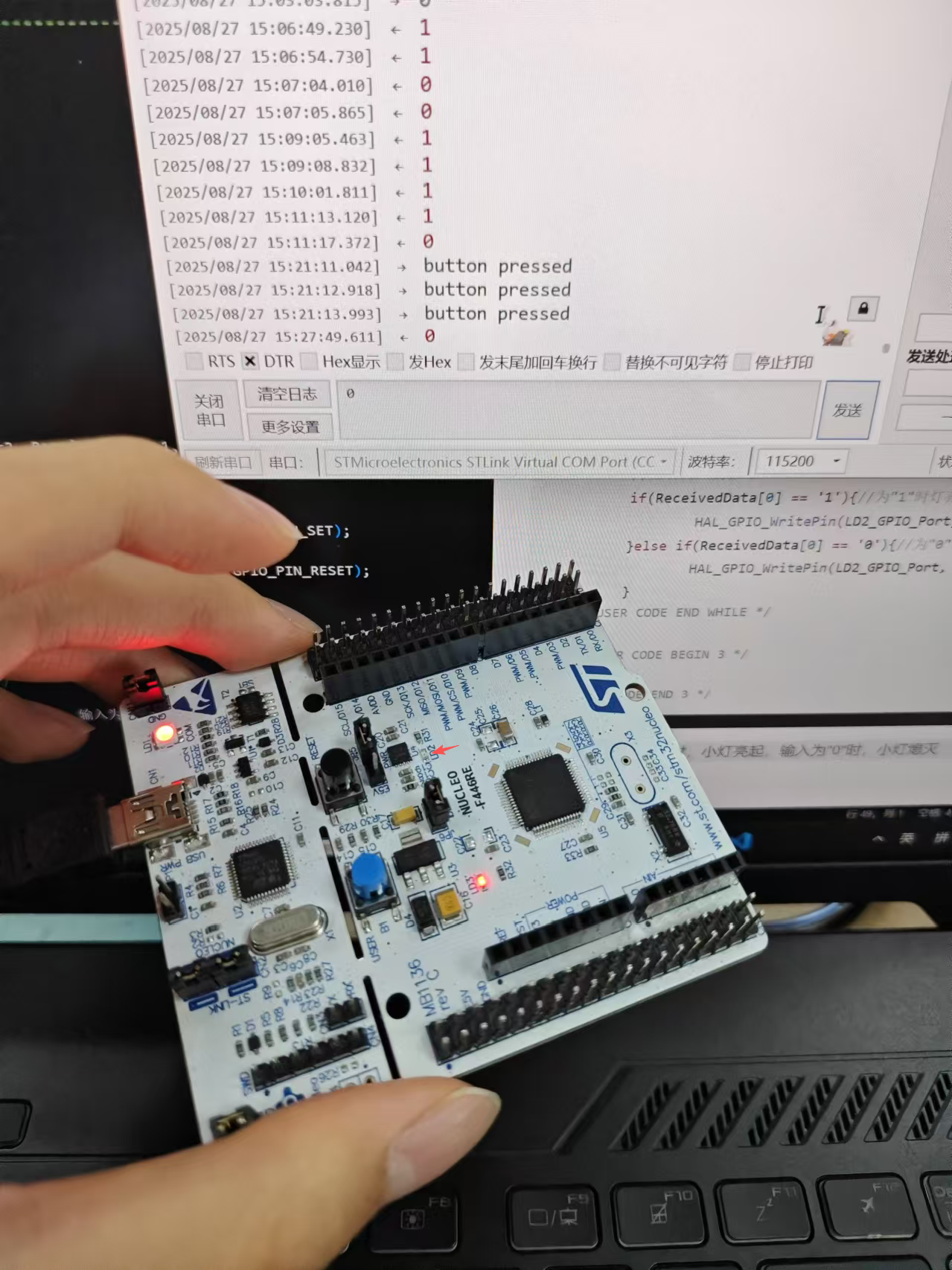
这样,当输入为"1"时,小灯亮起,输入为"0"时,小灯熄灭
II 检测按钮
- 在主函数外部声明输出按钮状态的字符串,以及中断回调函数
/* USER CODE BEGIN 0 */
char message[] = "button pressed";//说明按钮状态的字符串
//当按钮被摁下,产生中断,CPU会执行以下代码:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
//判断中断是否由按钮产生
if(GPIO_Pin == B1_Pin)
{
/*注意:第二个参数要求为8位整型指针,因此需要将字符串转换数据类型*/
HAL_UART_Transmit(&huart2, (uint8_t*)message, strlen(message), 100);
}
}
/* USER CODE END 0 */
这样,当按钮被摁下后,电脑端串口会接收到"button pressed"的字符串
3、代码清单
/**
* @brief 在阻塞模式下接收一些数据
* @note When UART parity is not enabled (PCE = 0), and Word Length is configured to 9 bits (M1-M0 = 01),
* the received data is handled as a set of u16. In this case, Size must indicate the number
* of u16 available through pData.
* @param huart 指向异步通讯结构体
* 为指定的异步通讯串口模型进行配置
* @param pData 需要传输的数据地址(指针,可以是数组) (要求元素为16位或者8位整型)
* @param Size 接收的元素数量
* @param Timeout 判定位超时所需时间(等待时间)
* @retval HAL status
*/
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
/*参数同上*/
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, const uint8_t *pData, uint16_t Size, uint32_t Timeout);
//自定义的外部声明函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == B1_Pin)
{
HAL_UART_Transmit(&huart2, (uint8_t*)message, strlen(message), 100);
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号