
系统滴答
SysTick(系统滴答)
1、 简介
- SysTick 是 ARM Cortex-M 内核处理器内置的24位向下计数定时器,主要用于生成系统级定时中断(如操作系统的心跳信号),支持查询方式延时和中断功能延时
2、使用方法(HAL)
(1)配置初始化
- 按照如下方式使能TIM4
![图片]()
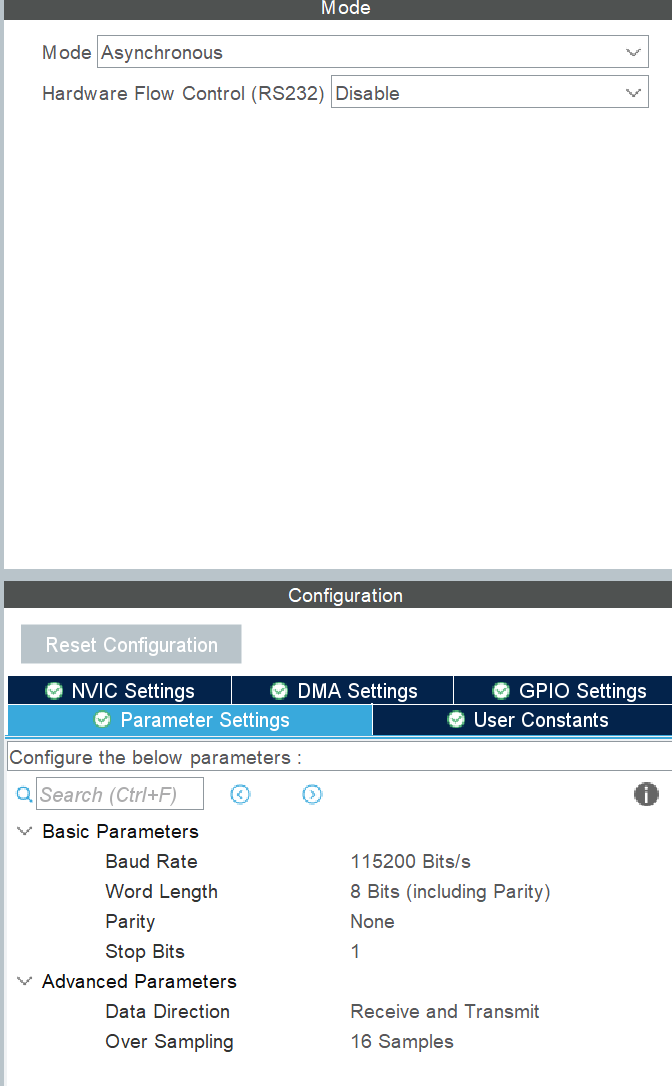
- 使能USART
![图片]()
- 使能RCC
![图片]()
- 使能这两个外设的中断
![图片]()
- 按照如下方式配置时钟树
![图片]()
- 完成计数器设置
![图片]()
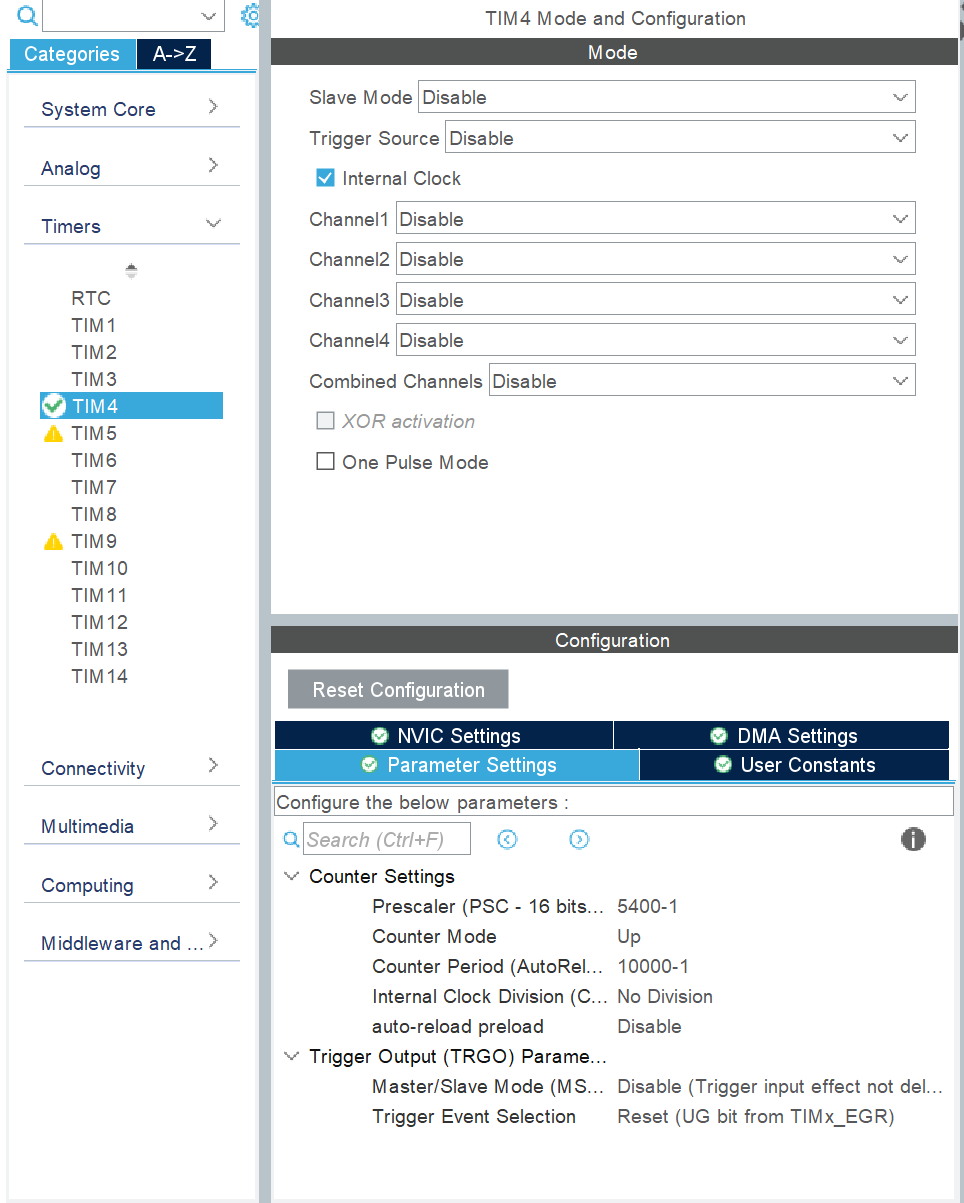


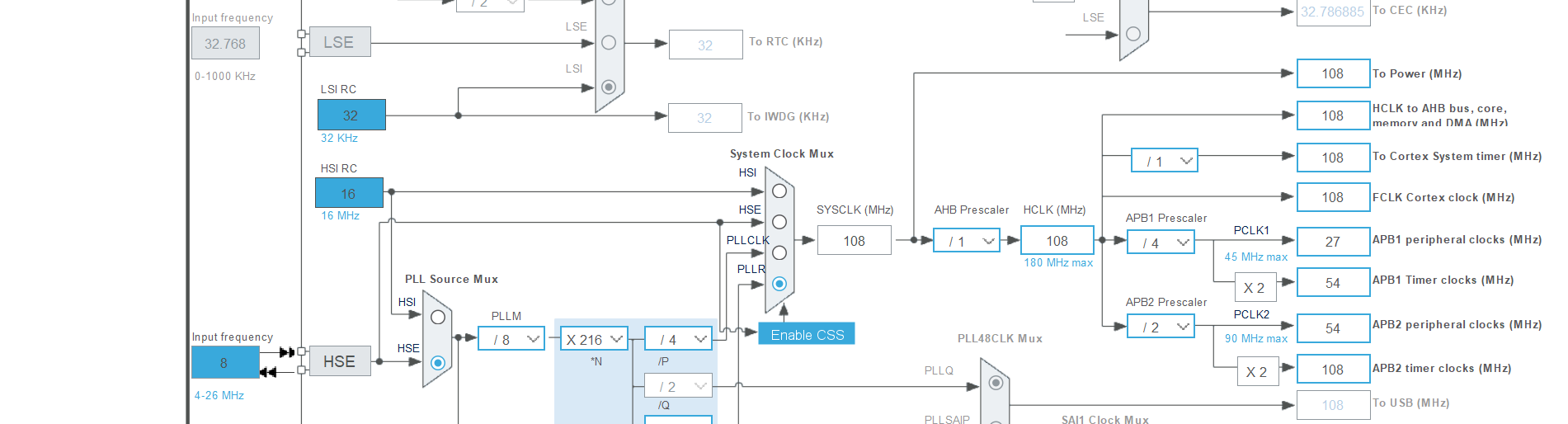
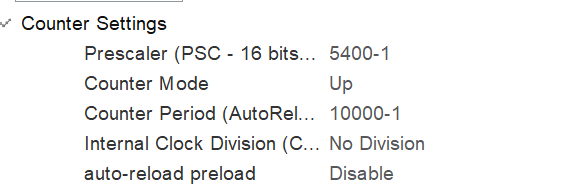
TIM4位于APB1总线上,此时该总线频率为54MHz,因此预分频为5400 - 1,这样计时器周期为$$\frac{54MHz}{5400} = 1000Hz$$
自动重装载寄存器设置为10000 - 1,这样计数器的一个周期为$$\frac{10000Hz}{10000}=1s$$

(2)编写读取代码
- 在主循环外部写入以下内容
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim4);//使TIM4计时器开始工作,完成一次计时后会发生中断
int counter = 0;//定义读取计时器当前数值的变量
char message[20];//定义串口输出的字符串
/* USER CODE END 2 */
- 在主循环内部写入以下内容
while (1)
{
counter = __HAL_TIM_GET_COUNTER(&htim4);//从TIM4计数器中读取数值
//将数值传出串口
sprintf(message, "counter:%d", counter);
HAL_UART_Transmit_IT(&huart2, (uint8_t*)message, strlen(message));
HAL_Delay(299);//每延时0.3秒,执行一次操作
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
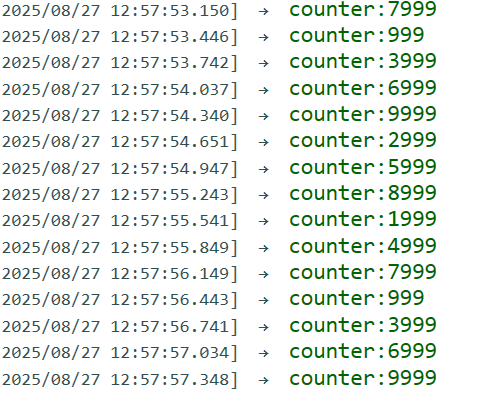
- 这样编写的程序就能在串口看到计时器的数值了
![图片]()
(3)处理中断
- 在主函数外部定义计时器中断回调函数
/* USER CODE BEGIN 0 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim == &htim4){
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin);
}
}
/* USER CODE END 0 */
这样每触发一次中断(即计时1秒),LED处的信号会翻转一次
效果如下:
3、代码清单
/**
* @brief Sends an amount of data in non blocking mode.
* @note When UART parity is not enabled (PCE = 0), and Word Length is configured to 9 bits (M1-M0 = 01),
* the sent data is handled as a set of u16. In this case, Size must indicate the number
* of u16 provided through pData.
* @param huart Pointer to a UART_HandleTypeDef structure that contains
* the configuration information for the specified UART module.
* @param pData Pointer to data buffer (u8 or u16 data elements).
* @param Size Amount of data elements (u8 or u16) to be sent
* @retval HAL status
*/
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, const uint8_t *pData, uint16_t Size);
/*----------中断回调函数---------------*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if(htim == &htim4){
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin);
}
}
/*----------打印结果的函数---------------------*/
int sprintf (char *__restrict, const char *__restrict, ...)
_ATTRIBUTE ((__format__ (__printf__, 2, 3)));
/**
* @brief This function provides minimum delay (in milliseconds) based
* on variable incremented.
* @note In the default implementation , SysTick timer is the source of time base.
* It is used to generate interrupts at regular time intervals where uwTick
* is incremented.
* @note This function is declared as __weak to be overwritten in case of other
* implementations in user file.
* @param Delay specifies the delay time length, in milliseconds.
* @retval None
*/
__weak void HAL_Delay(uint32_t Delay)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号