
13_USART串口协议
USART串口协议
通信接口

串口通信

硬件电路
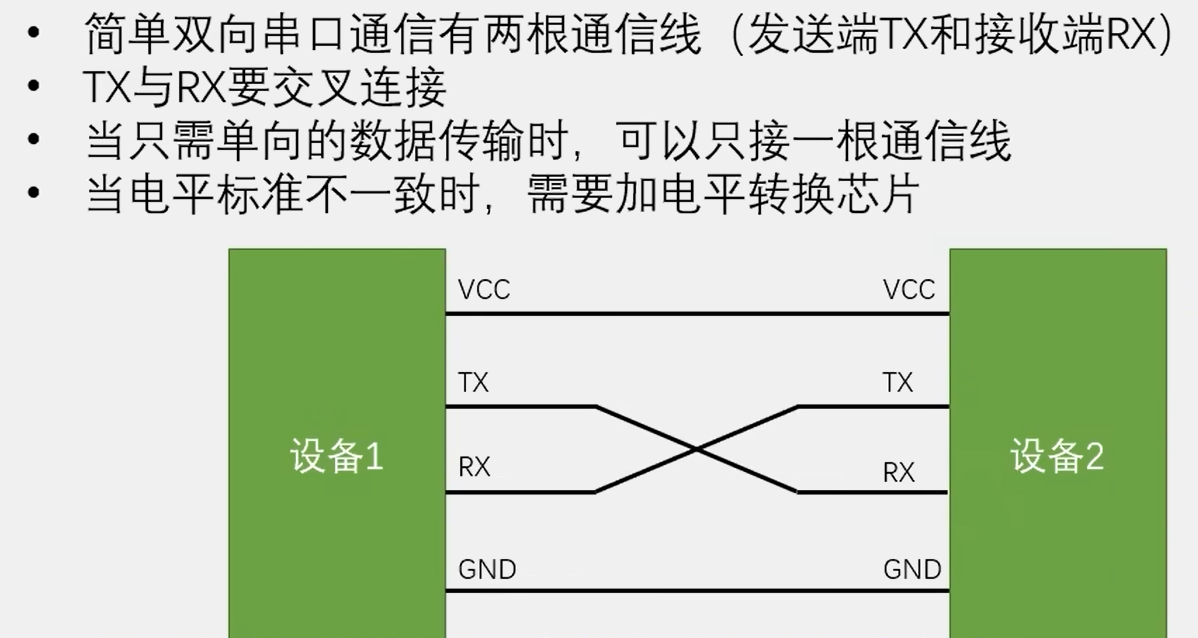
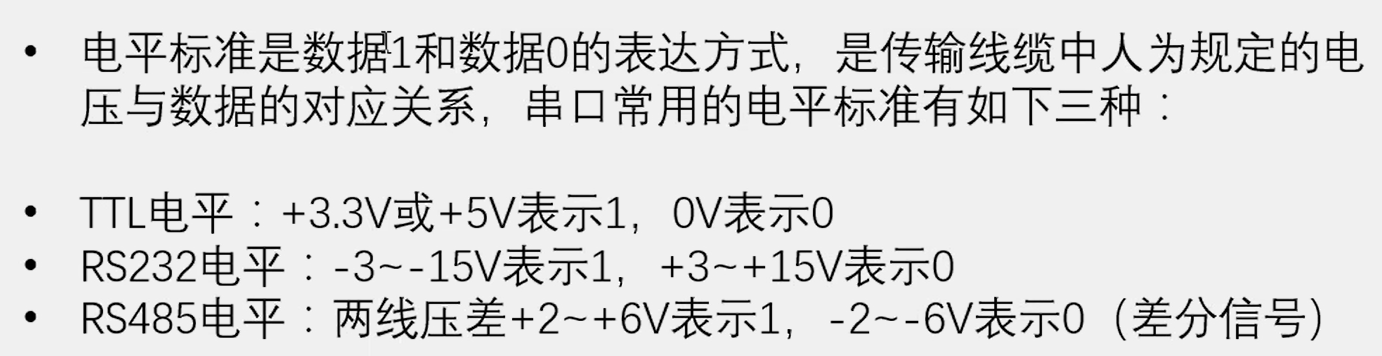
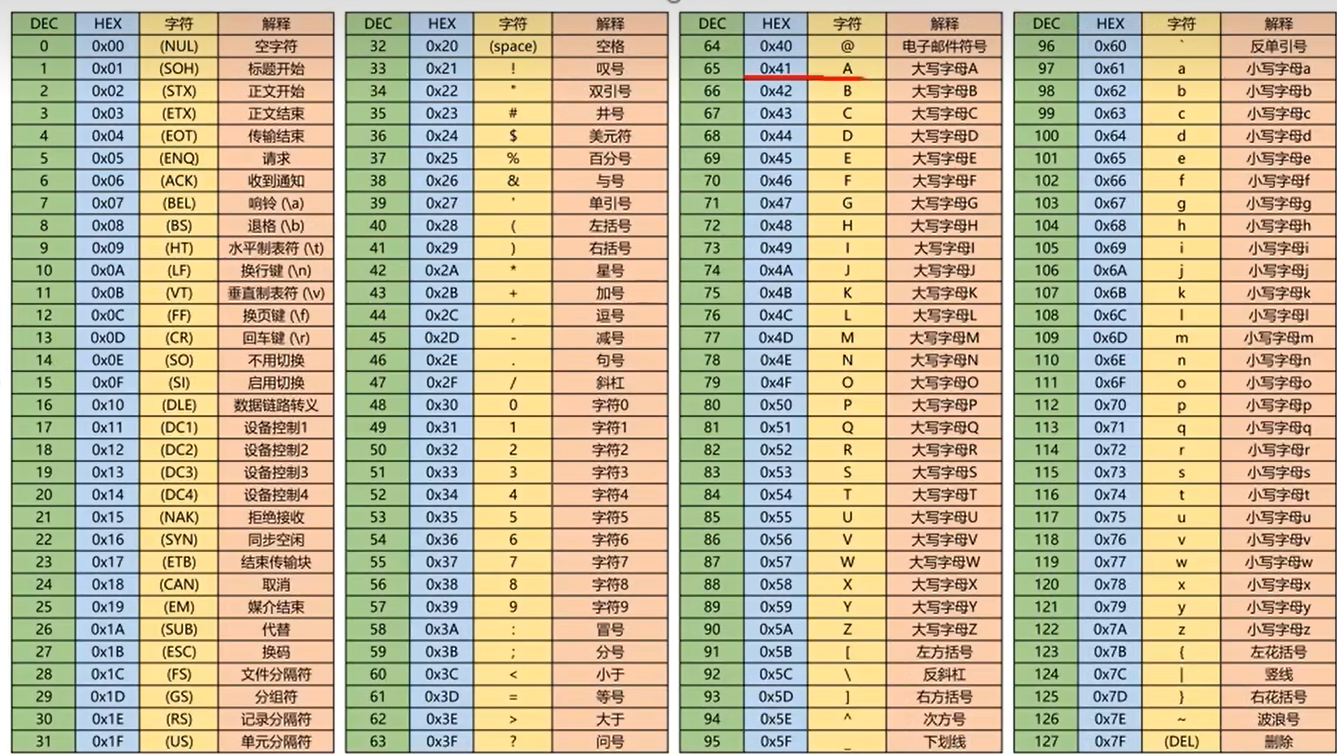
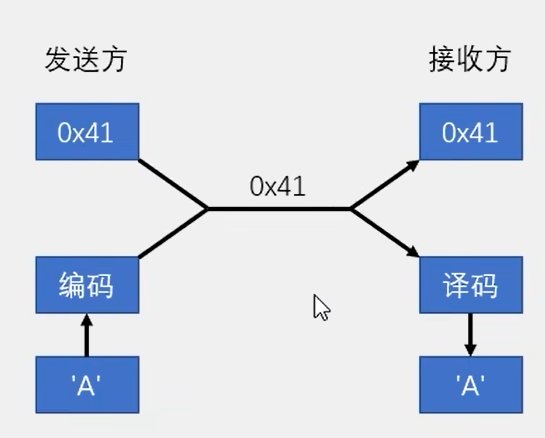
电平标准
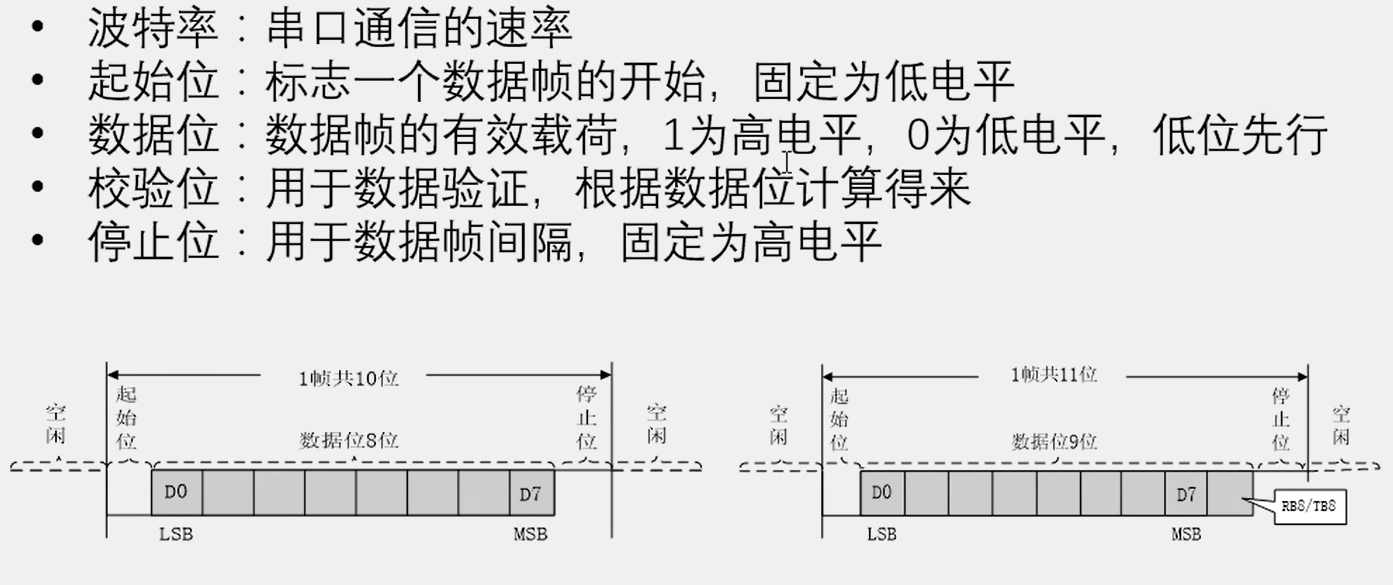
串口参数及时序
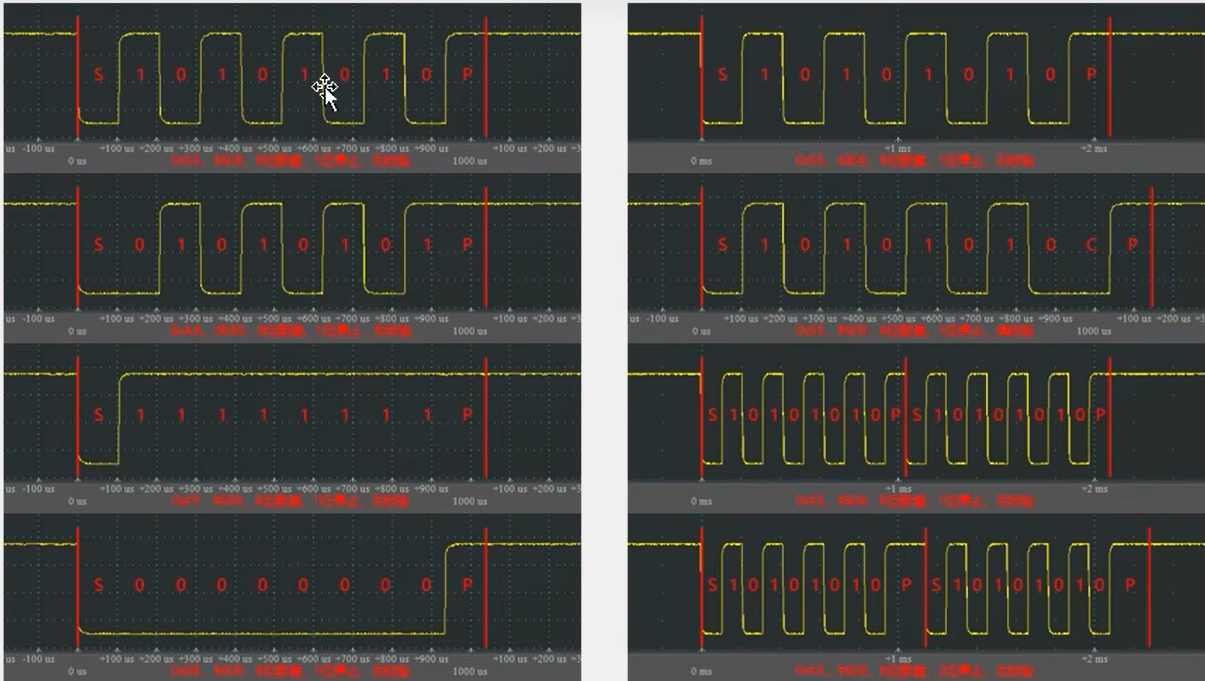
串口时序
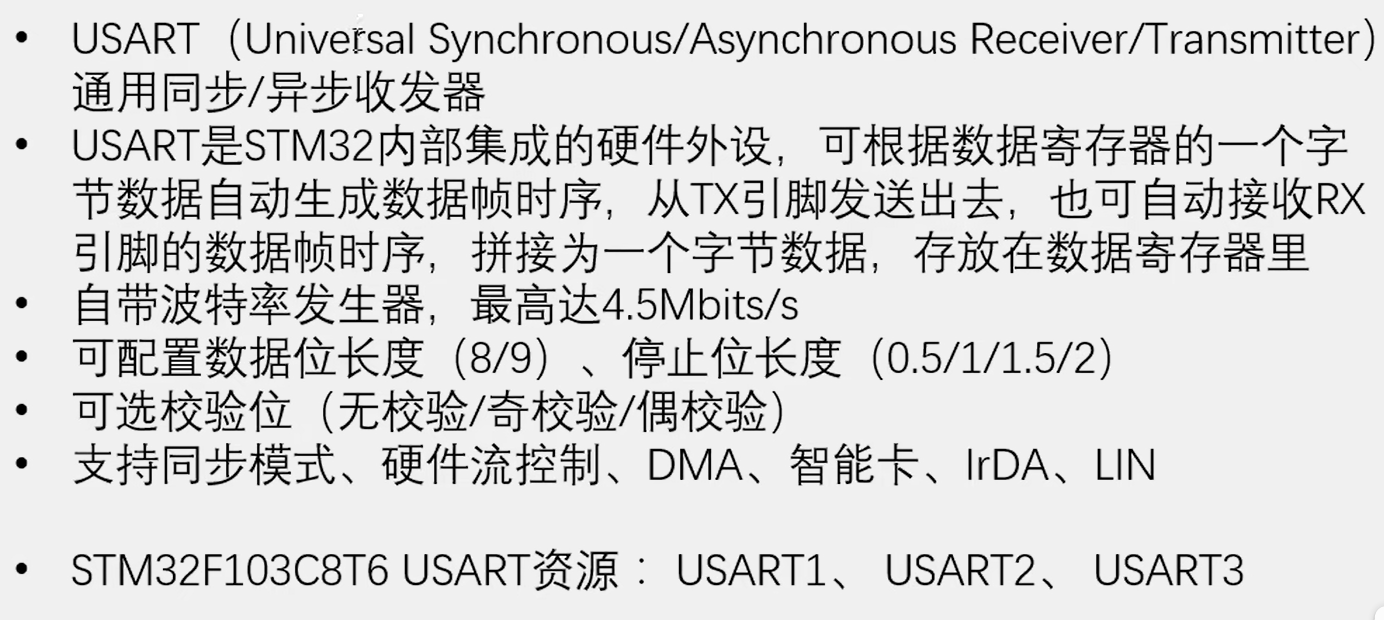
USART简介
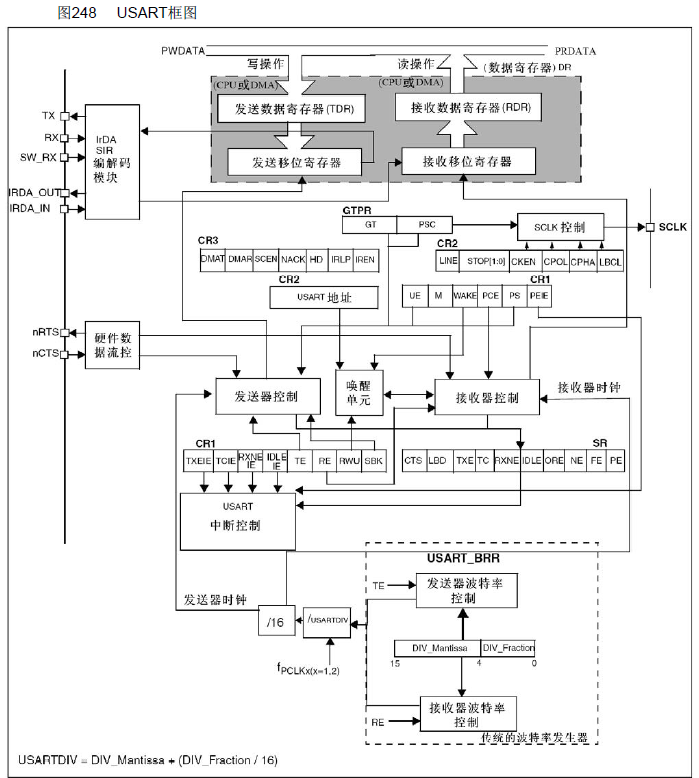
USART框图
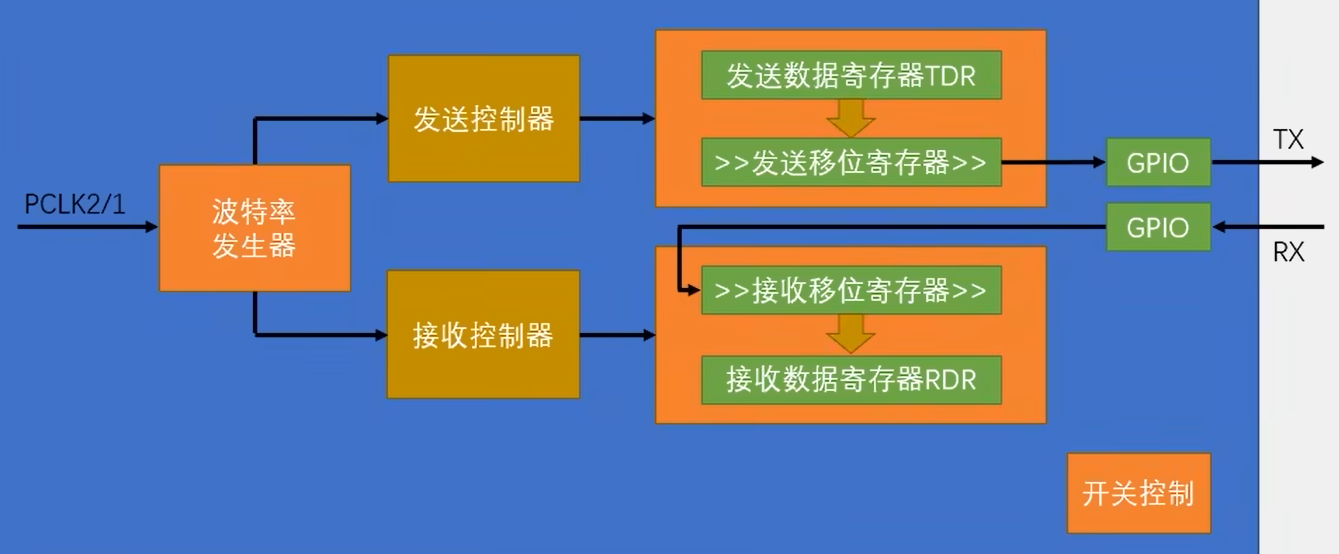
USART基本结构
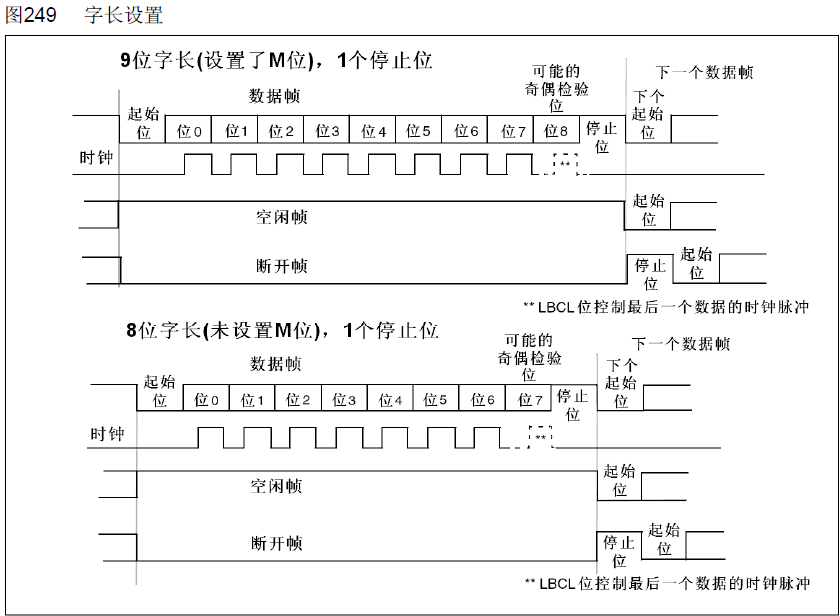
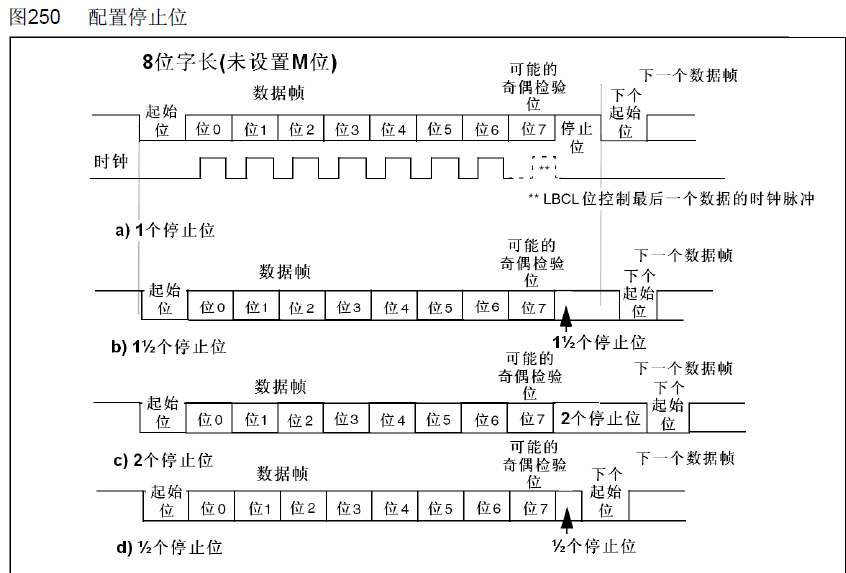
数据帧
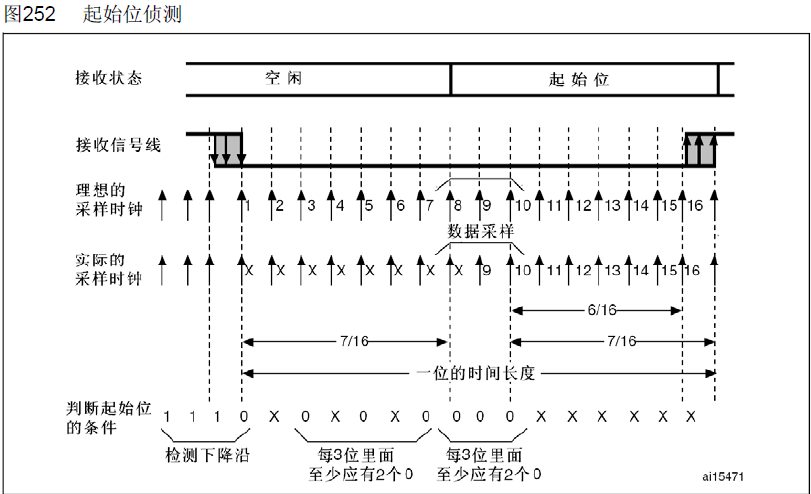
起始位侦测
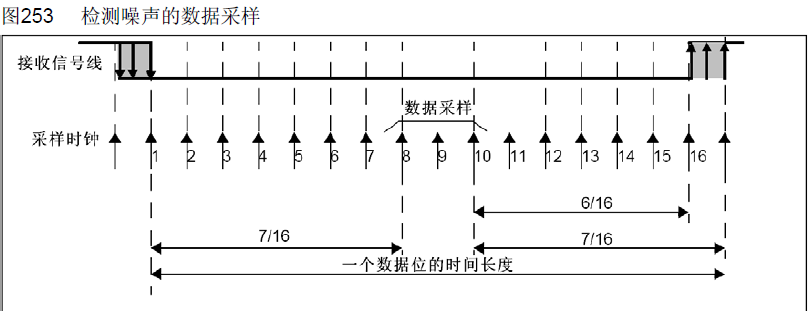
数据采样
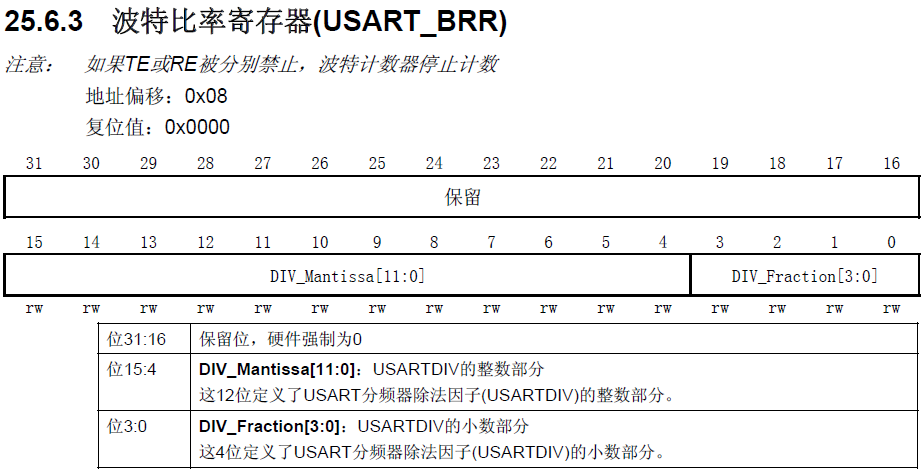
波特率发生器

数据模式

串口发送
接线图
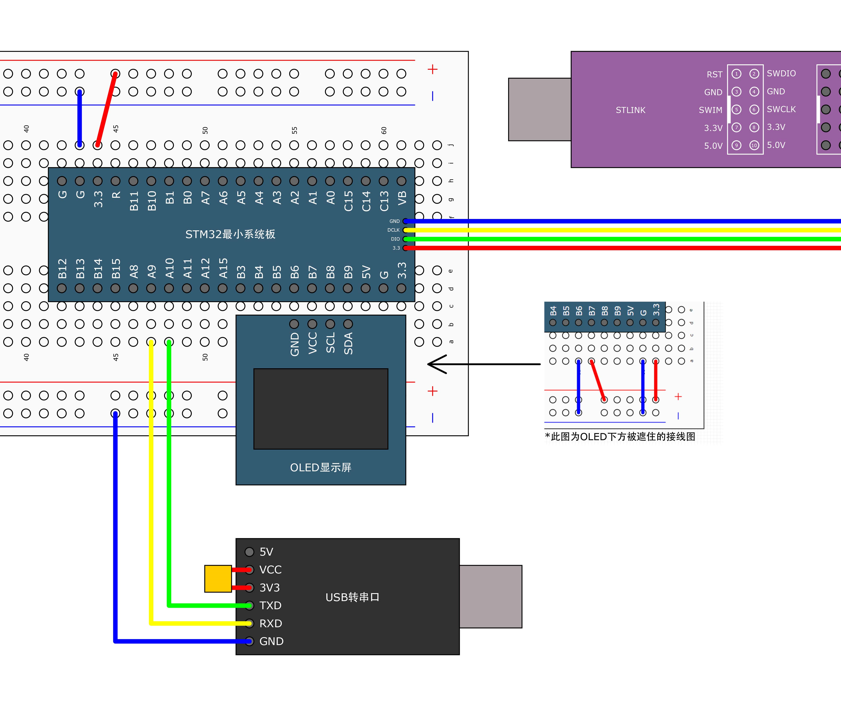
引脚定义

代码
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
void Serial_Init(void)
{
//开启USART1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//开启GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//初始化GPIO引脚
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//初始化USART
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=9600; //波特率
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //硬件流控制
USART_InitStruct.USART_Mode=USART_Mode_Tx; //发送模式
USART_InitStruct.USART_Parity=USART_Parity_No; //校验位
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长
USART_Init(USART1,&USART_InitStruct);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint16_t i;
for(i=0;String[i];i++)
{
Serial_SendByte(String[i]);
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);
Serial_SendString(String);
}
Serial.h
#ifndef __SERIAL_H__
#define __SERIAL_H__
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array,uint16_t Length);
void Serial_SendString(char *String);
void Serial_Printf(char *format, ...);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
int main(void)
{
OLED_Init();
Serial_Init();
Serial_SendByte(0x41);
uint8_t MyArray[]={0x41,0x42,0x43,0x44};
Serial_SendArray(MyArray,sizeof(MyArray));
Serial_SendString("sadhnfoasdk\r\nksadfj\r\nsdlhfj\r\ndfgdsfgdfg");
printf("Num=%d\r\n",666);
char String[100];
sprintf(String, "Num=%d\r\n", 666);
Serial_SendString(String);
Serial_Printf("Num=%d\r\n", 555);
Serial_Printf("你好世界");
while(1)
{
}
}
串口发送+接收
代码
Serial.c
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
//开启USART1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//开启GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//初始化GPIO引脚
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU; //上拉输入模式
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//初始化USART
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=9600; //波特率
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //硬件流控制
USART_InitStruct.USART_Mode=USART_Mode_Tx | USART_Mode_Rx; //发送模式
USART_InitStruct.USART_Parity=USART_Parity_No; //校验位
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长
USART_Init(USART1,&USART_InitStruct);
//中断配置
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART1,ENABLE);
}
uint8_t Serial_GetRxFlag(void)
{
if(Serial_RxFlag)
{
Serial_RxFlag=0;
return 1;
}
else
{
return 0;
}
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
//中断函数
void USART1_IRQHandler(void)
{
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==SET)
{
Serial_RxData=USART_ReceiveData(USART1);
Serial_RxFlag=1;
USART_ClearITPendingBit(USART1,USART_FLAG_RXNE);
}
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
void Serial_SendArray(uint8_t *Array,uint16_t Length)
{
uint16_t i;
for(i=0;i<Length;i++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint16_t i;
for(i=0;String[i];i++)
{
Serial_SendByte(String[i]);
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg,format);
vsprintf(String,format,arg);
va_end(arg);
Serial_SendString(String);
}
Serial.h
#ifndef __SERIAL_H__
#define __SERIAL_H__
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array,uint16_t Length);
void Serial_SendString(char *String);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
int main(void)
{
OLED_Init();
Serial_Init();
while(1)
{
if(Serial_GetRxFlag())
{
OLED_ShowHexNum(1,1,Serial_GetRxData(),2);
}
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号