

樽海鞘优化算法
1. 简介
樽海鞘是一种透明的桶状生物,和水母比较相似。它通过吸水、喷水来移动的。由于它生活在寒带的深海里面,给我们的研究造成了一定的困扰。但是,这并不影响我们对它的研究。在深海里,樽海鞘是以樽海鞘链的形式存在,这就是我们感兴趣的群体行为之一。我们将樽海鞘链分为两个部分:1、领导者;2、追随者。领导者就是樽海鞘链前端的部分;追随者就是樽海鞘链后端的部分。当领导者被设置为樽海鞘链的前半部分时,算法效率更高。
2. 算法核心
领导者的位置更新公式:
\[x_j^1=
\left\{
\begin{matrix}
F_j + c_1((ub_j - lb_j)c_2 + lb_j) & c_3\geq0\\
F_j - c_1((ub_j - lb_j)c_2 + lb_j) & c_3<0
\end{matrix}
\right.
\]
其中,\(x_j^1\)是领导者在第\(j\)维的位置; \(F_j\)表示食物在第\(j\)维的位置; \(ub_j\)表示领导者在第\(j\)维的上界, \(lb_j\)表示领导者在第\(j\)维的下界; \(c_1\), \(c_2\), \(c_3\)。\(c_1=2e^{-(\frac{4l}{L})}\), 其中,\(l\)表示当前迭代次数,\(L\)表示最大迭代次数。
追随者位置更新公式:
\[x_j^i=\frac{1}{2}(x_j^i + x_j^{i-1})
\]
3. matlab代码实现(两个版本)
第一版
clc
clear
close all;
npop = 50; % 种群规模
nVar = 3; % 变量维数
max_iter = 1000; % 最大迭代次数
lb = -100; % 下界
ub = 100; % 上界
obj = @ sphere; % 目标函数
%% 初始化
SalpPositions = zeros(npop,nVar);
SalpFitness = zeros(1,npop);
FoodPosition = zeros(1,nVar); % 食物位置
FoodFitness = inf;
% 初始化种群并计算个体适应度
for i=1:npop
SalpPositions(i,:) = lb + rand(1,nVar)*(ub-lb);
SalpFitness(i) = obj(SalpPositions(i,:));
if SalpFitness(i)<FoodFitness
FoodPosition = SalpPositions(i,:);
FoodFitness = SalpFitness(i);
end
end
best_scores = [FoodFitness];
%% SSA算法开始
for iter=1:max_iter
c1 = 2*exp(-(4*iter/max_iter)^2); % 设置参数
for i=1:npop
if i<=npop/2
for j=1:nVar
c2 = rand();
c3 = rand();
if c3<0.5
SalpPositions(i,:) = FoodPosition + c1*((ub - lb)*c2 + lb);
else
SalpPositions(i,:) = FoodPosition - c1*((ub - lb)*c2 + lb);
end
end
elseif i > npop/2 && i < npop+1
point1 = SalpPositions(i-1,:);
point2 = SalpPositions(i,:);
SalpPositions(i,:) = (point1 + point2)/2;
end
%% 边界修正
Tp = SalpPositions(i,:)>ub;
Tm = SalpPositions(i,:)<lb;
SalpPositions(i,:) = SalpPositions(i,:).*(~(Tp+Tm)) + ub.*Tp + lb.*Tm;
%% 进化机制
SalpFitness(i) = obj(SalpPositions(i,:));
if SalpFitness(i)<FoodFitness
FoodPosition = SalpPositions(i,:);
FoodFitness = SalpFitness(i);
end
end
disp(['Iter=', num2str(iter), ' || fmin=', num2str(FoodFitness)]);
best_scores = [best_scores,FoodFitness];
end
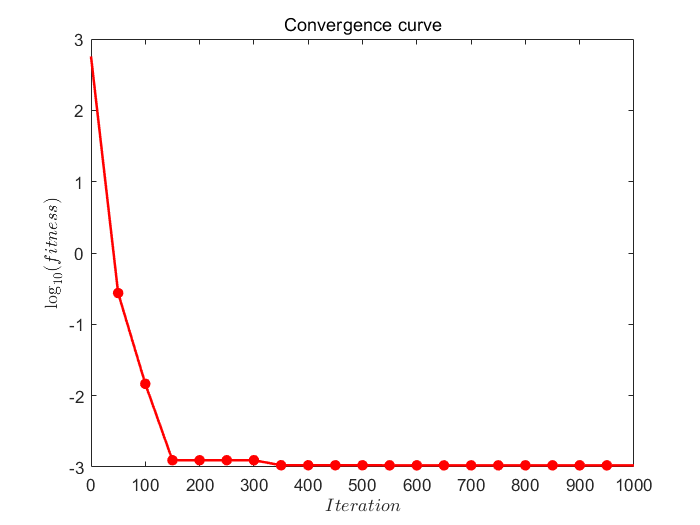
%% SSA可视化
figure
xx = 1:50:1001;
xxx = 0:50:1000;
plot(xxx,log10(best_scores(xx)),'r','LineWidth',1.5);
hold on;
sz = 40;
scatter(xxx(2:end-1),log10(best_scores(xx(2:end-1))),sz,'ro','filled');
xlabel('$$Iteration$$','Interpreter','latex');
ylabel('$$\log_{10} (fitness)$$','Interpreter','latex');
title('Convergence curve')
第二版
clc
clear
close all;
%% 问题定义
CostFunction = @(x) sphere(x); % 目标函数
nVar = 2; % 变量的维数
VarSize = [1,nVar]; % 变量的矩阵大小
VarMin =-100; % 变量的下确界
VarMax = 100; % 变量的上确界
%% SSA参数
MaxIt = 1000; % 最大迭代次数
nPop = 50; % 种群大小
%% 初始化
empty_slaps.Position = []; % 樽海鞘模板
empty_slaps.Cost = [];
% 创建种群数组
slaps = repmat(empty_slaps,nPop,1);
% 初始化食物的适应度
Food.Cost = inf;
% 初始化种群
for i=1:nPop
slaps(i).Position = VarMin + (VarMax-VarMin)*rand(VarSize); % 初始化种群
slaps(i).Cost = CostFunction(slaps(i).Position); % 评价
% 更新食物的位置
if slaps(i).Cost < Food.Cost
Food = slaps(i);
end
end
BestCosts = zeros(MaxIt,1);
%% SSA算法的主程序
for it=1:MaxIt
c1 = 2*exp(-(4*it/MaxIt)^2); % 设置参数
for i=1:nPop
if i <= nPop/2
c2=rand();
c3=rand();
if c3<0.5
slaps(i).Position =Food.Position + c1*((VarMax - VarMin)*c2 + VarMin); % 公式3.1
else
slaps(i).Position =Food.Position - c1*((VarMax - VarMin)*c2 + VarMin);
end
elseif i > nPop/2 && i < nPop+1
point1 = slaps(i-1).Position;
point2 = slaps(i).Position;
slaps(i).Position = (point2 + point1)/2; % 公式3.4
end
% 边界处理
Tp = slaps(i).Position>VarMax;
Tm = slaps(i).Position<VarMin;
slaps(i).Position = slaps(i).Position.*(~(Tp+Tm)) + VarMax.*Tp + VarMin.*Tm;
% 计算适应度值
slaps(i).Cost = CostFunction(slaps(i).Position);
% 保留精英
if slaps(i).Cost < Food.Cost
Food = slaps(i);
end
end
BestCosts(it) = Food.Cost;
disp(['Iteration ' num2str(it) ': Best Cost = ' num2str(BestCosts(it))]);
end
目标函数文件
%% 目标函数
function z = sphere(x)
%UNTITLED2 Summary of this function goes here
% Detailed explanation goes here
z = sum(x.^2);
end
4. 可视化结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号