

关于苏州展厅小车
修改代码:
-
如果要修改代码,启动小车后要拿个鼠标连到车上,叉掉车身屏幕上的那个窗口,这个时候车的雷达会停止
-
修改代码最好使用ssh远程连接,我直接用的vscode的ssh插件
-
修改代码的路径为
~/ros_ws/src/car/src/servo_node_hilens7.py,修改的过程中不要动其他代码 -
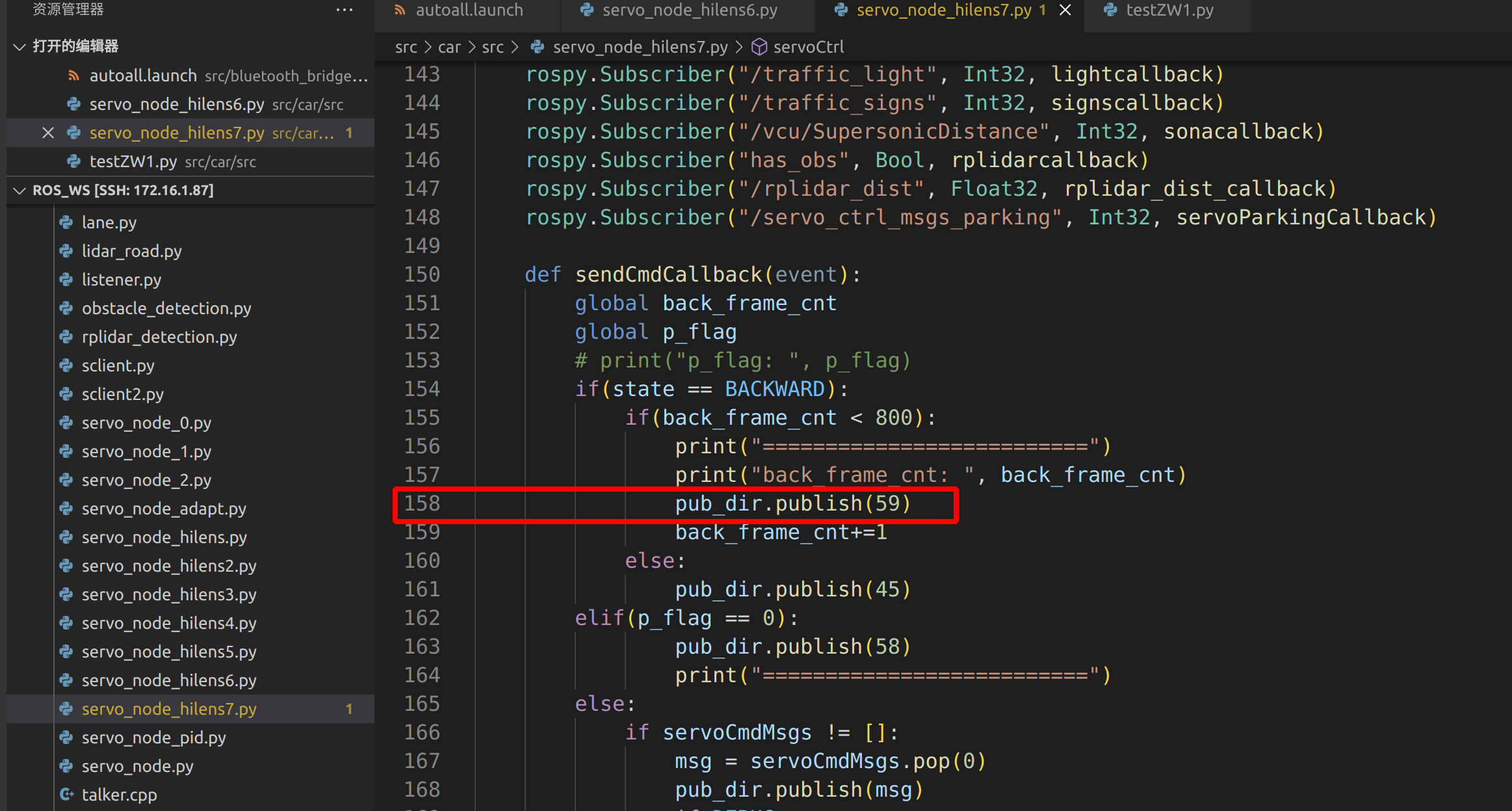
关于停车位置偏左或者偏右。修改下面所示的第158行代码括号中的数字59,调大停车位置会偏右,即靠近大屏幕方向,调小会偏左,即远离大屏幕方向。建议每次增减1,比较效果后再继续修改。
![]()
-
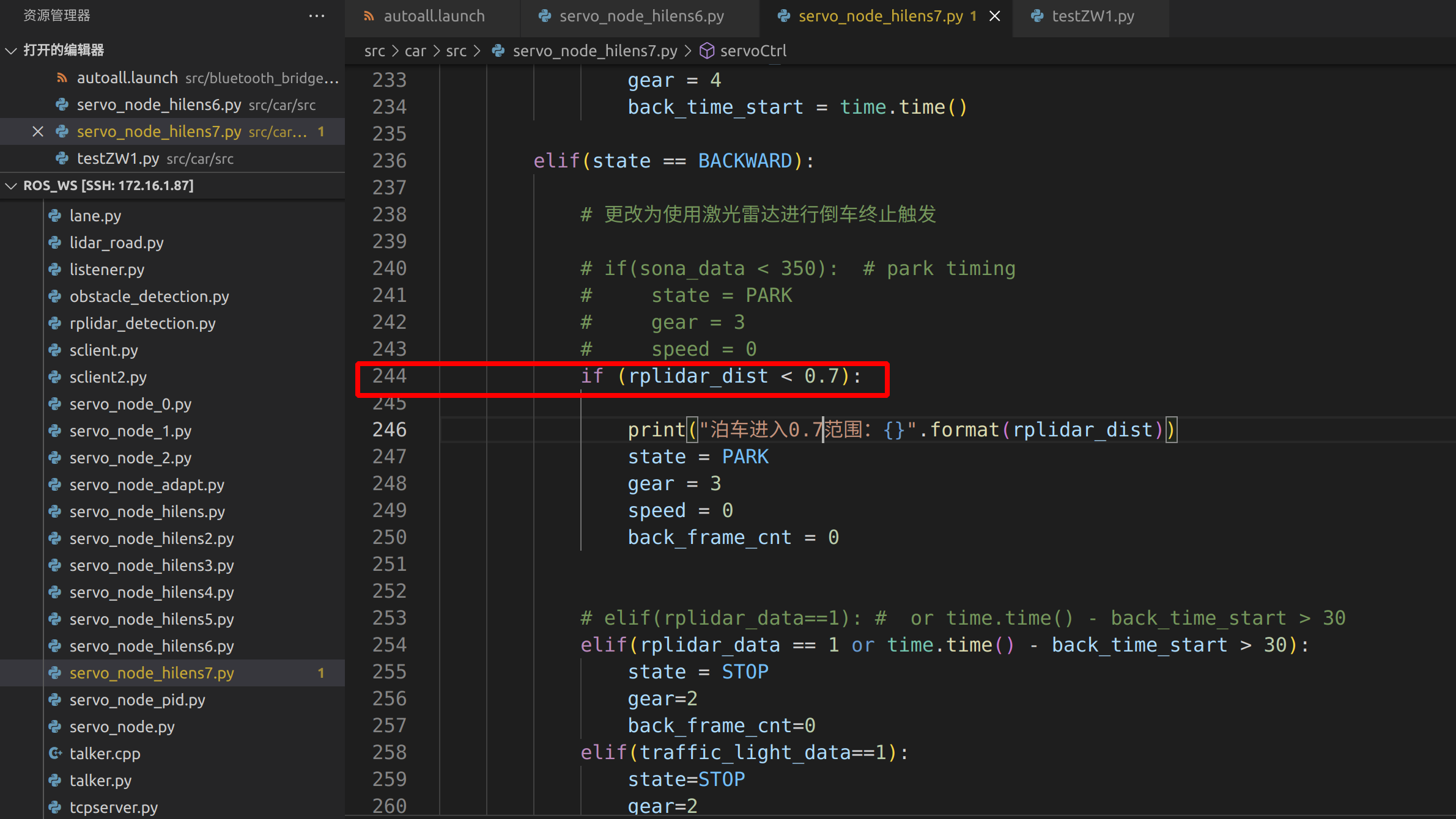
关于停车位置靠前还是靠后。修改第244行的0.7,调的越小停车位置和后面靠的越近。建议每次加减0.05,然后比较效果。
![]()
-
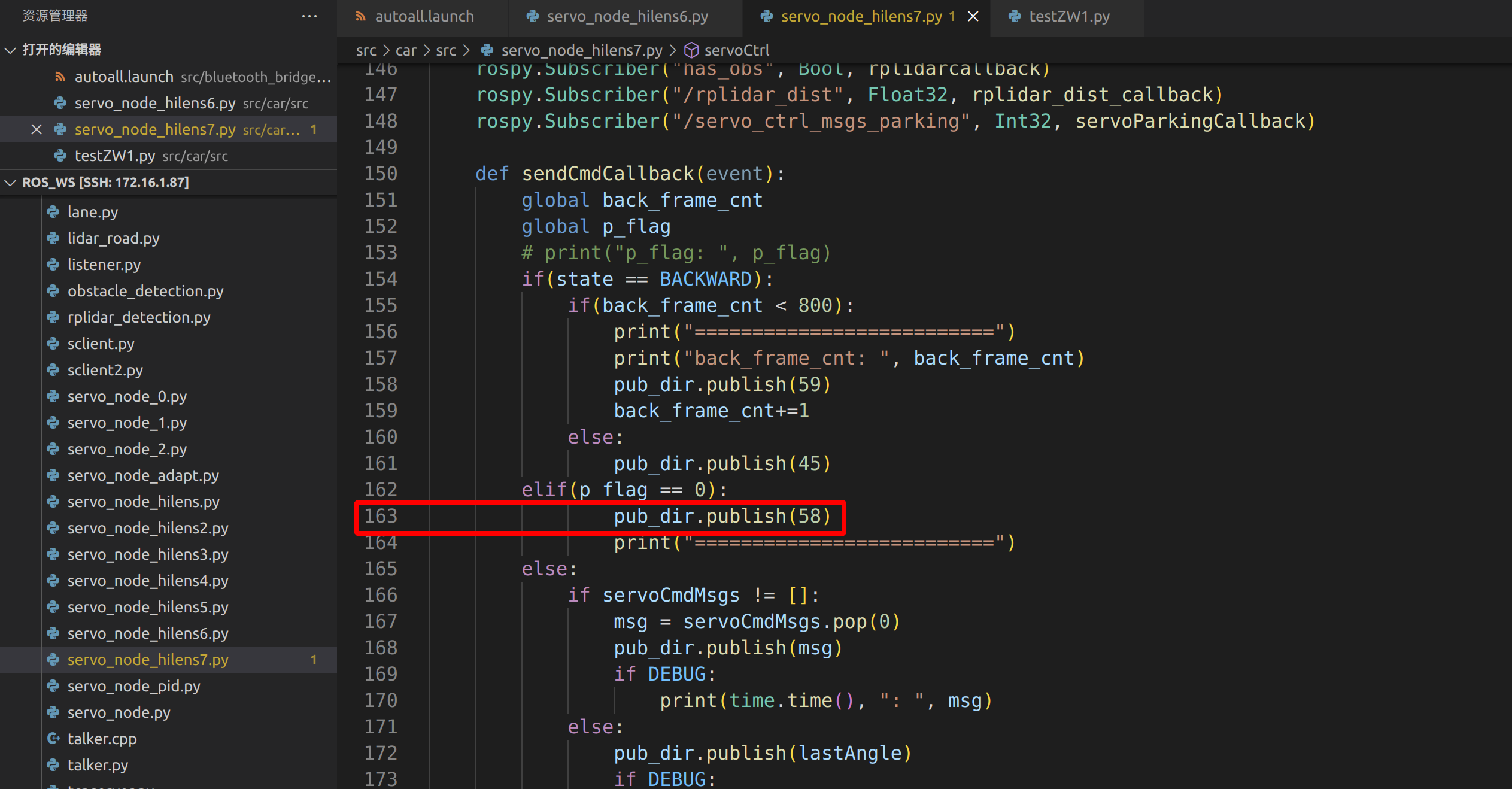
关于斑马线处小车偏左还是偏右。修改这个58,增加会更偏右。
![]()
-
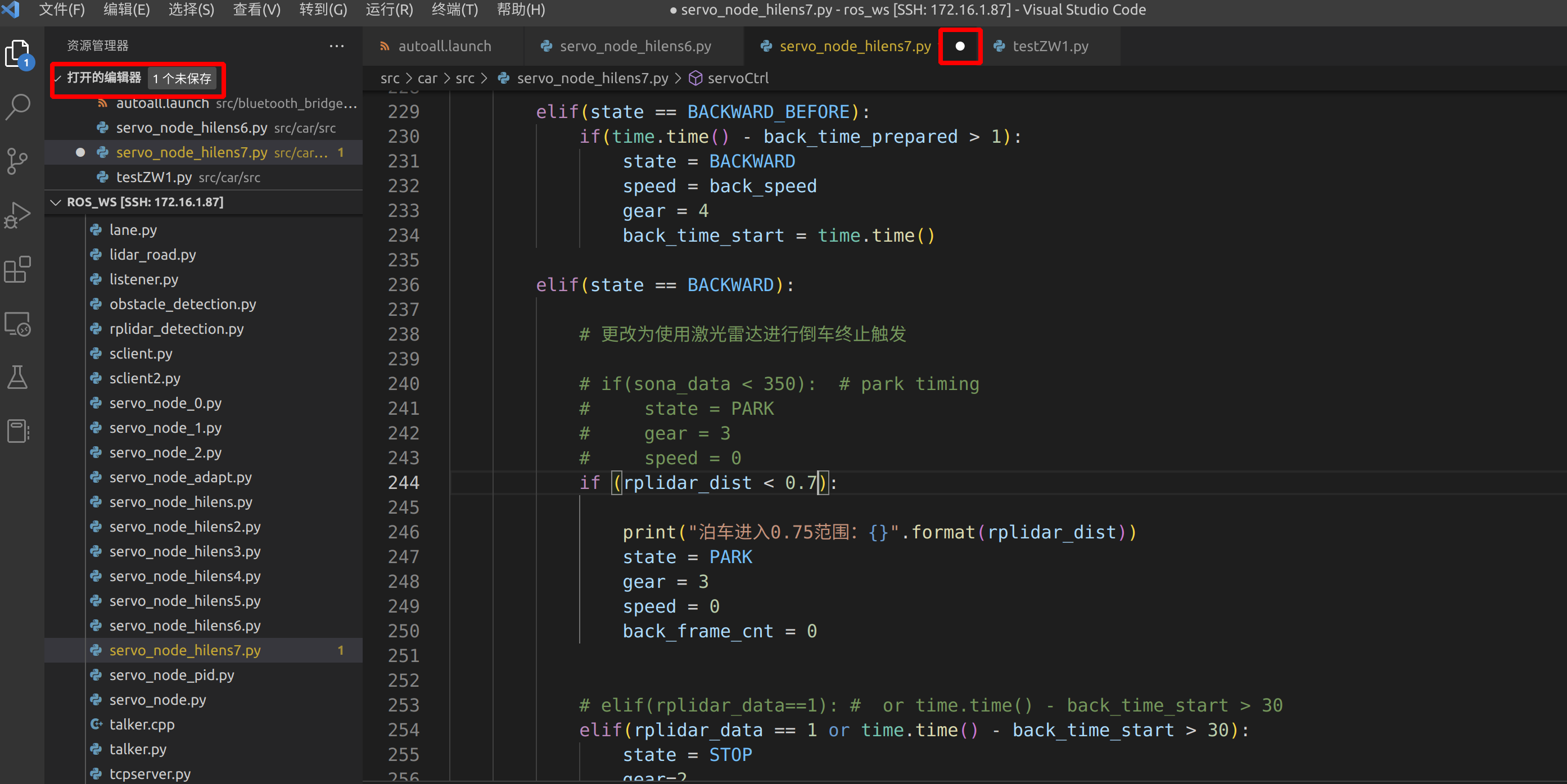
如果修改了代码,请注意保存,比如下面这样👇👇,注意按
ctrl + s,下面红框中的标识消失就是保存好了
![]()
-
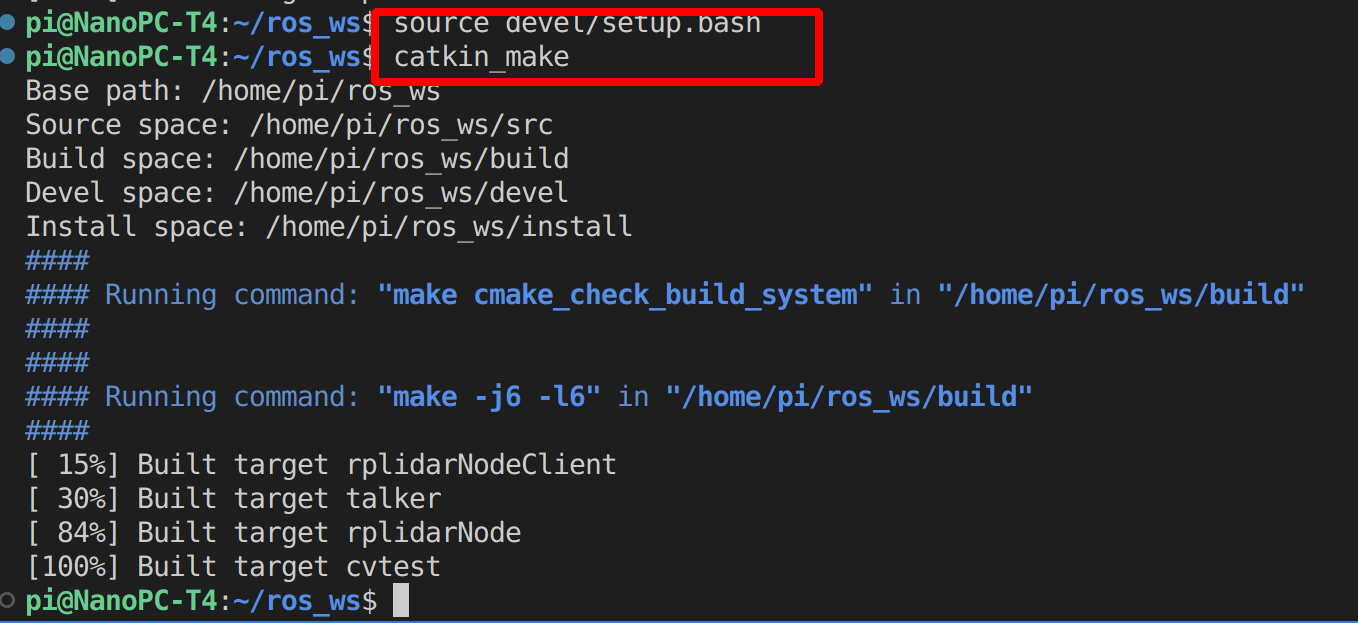
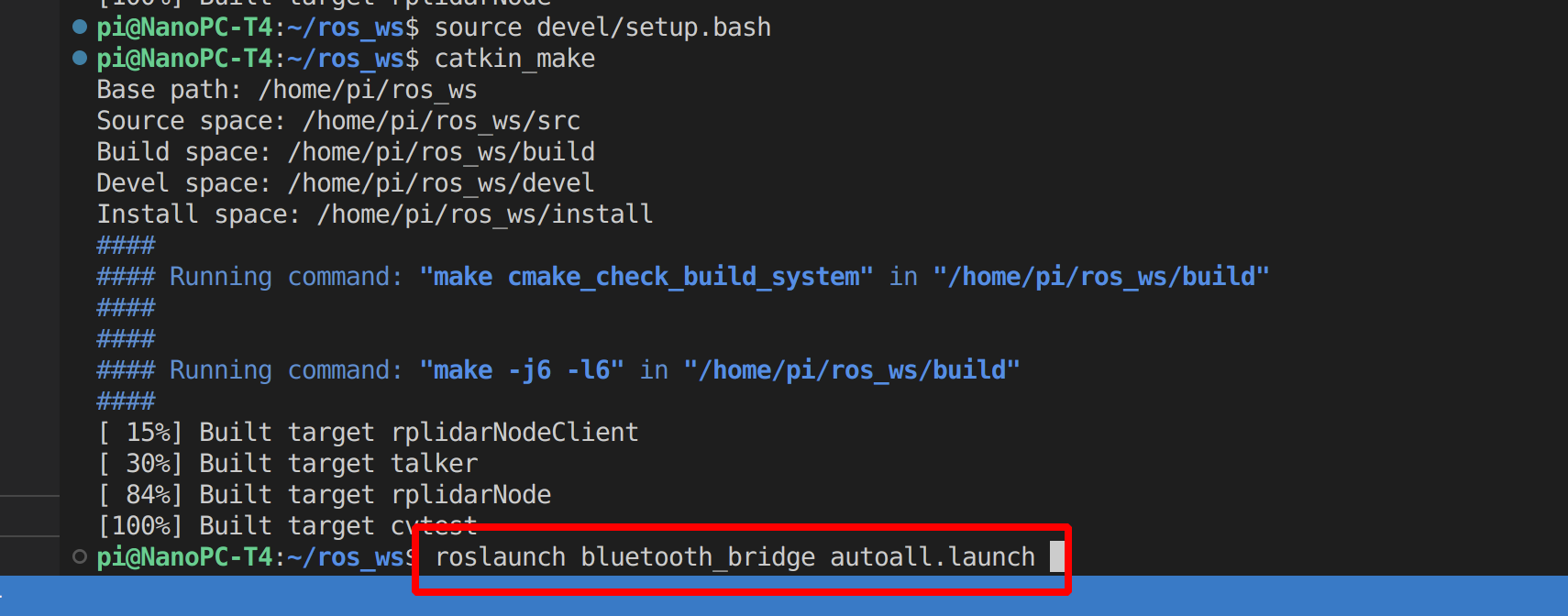
保存代码后注意要在命令行中输入三个命令小车才能运行
source devel/setup.bashcatkin_makeroslaunch bluetooth_bridge autoall.launch
![]()
![]()
不出意外的话小车就能按你的想法跑起来啦😊
注意事项:
- 如果出现跑着跑着突然停一下然后接着走的情况,请关机重启,再试一次,大概率会消失
- 如果发生堵转(比如撞到东西,但后轮还在转),请关机冷却一会,并且拧紧四个轮子的螺丝,总之遇到异常情况最好直接重启
- 如果换过网络,比如升级wifi,vscode的ssh需要更新IP
- 关于图传,如果闪绿灯,长按mode键,变红后等待,大屏幕上应该会变成已连接
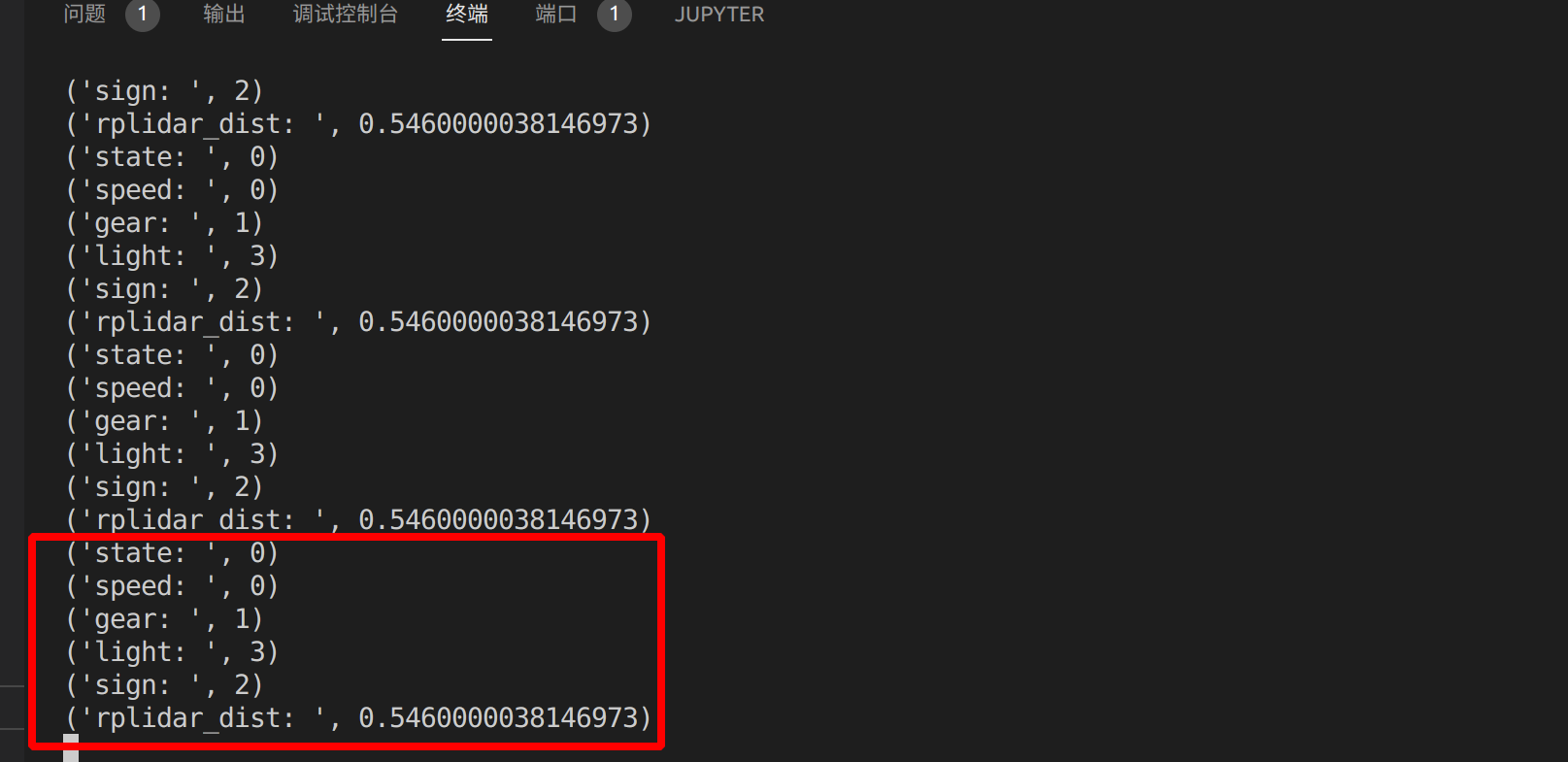
- 关于调试车辆信息,下面红框中是运行时打印的一组调试信息,对应了车的各种状态
![]()
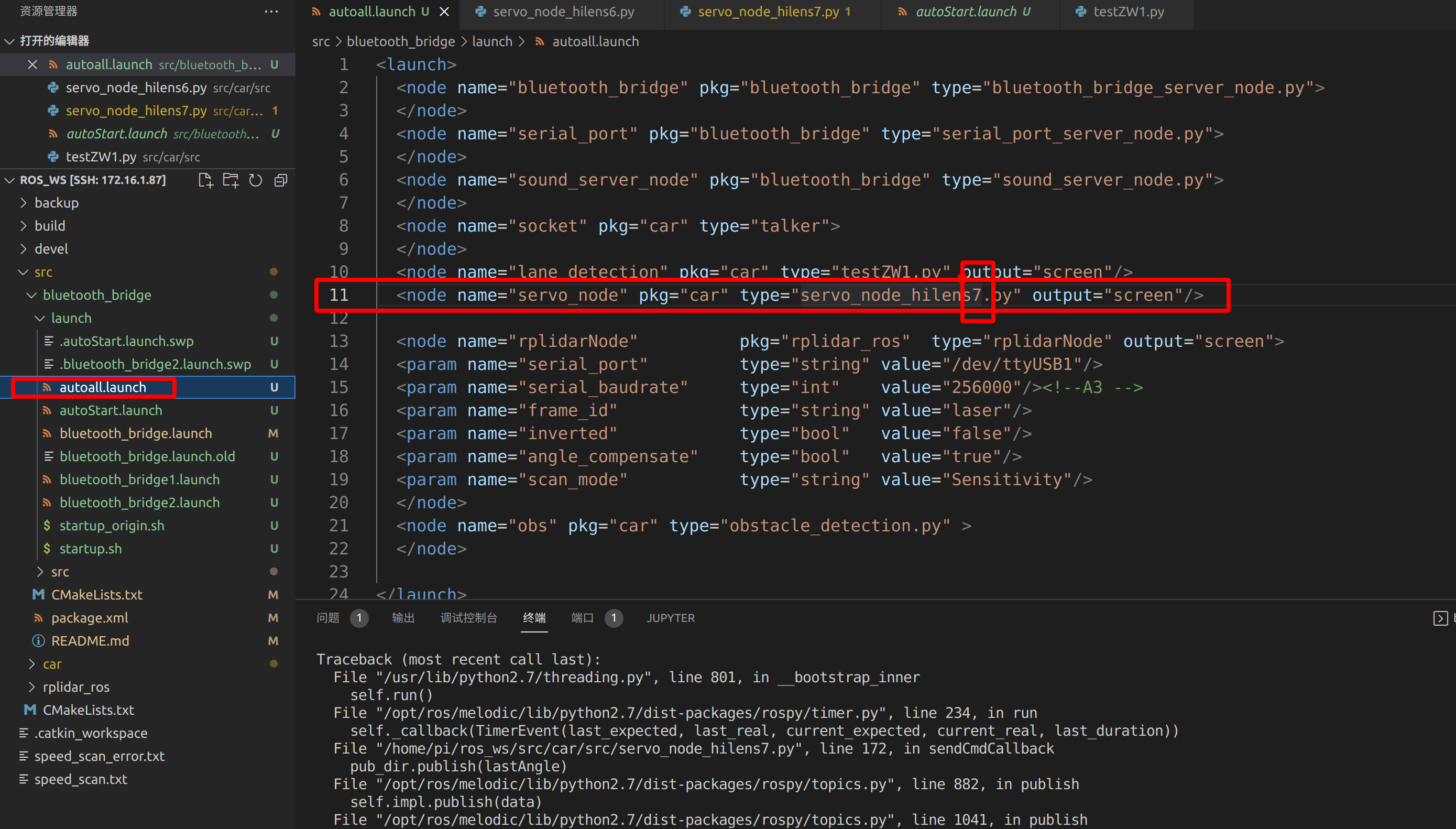
- 重中之重!! 如果代码改乱了怎么办?我留了一个备份,把下面这个文件中的7改成8,就可以使用备份文件了
![]()

 浙公网安备 33010602011771号
浙公网安备 33010602011771号