

SkipList
SkipList
经典的数据结构。这里我们借用CMU15445 2025 Spring的仓库来实现我们的跳表结构。相关的论文可以查看:
Skip Lists: A Probabilistic Alternative to Balanced Trees
头文件定义
#pragma once
#include <cstddef>
#include <cstdint>
#include <functional>
#include <memory>
#include <random>
#include <shared_mutex>
#include <vector>
#include "common/macros.h"
namespace bustub {
// 采用宏定义来简化模版。
#define SKIPLIST_TEMPLATE_ARGUMENTS template <typename K, typename Compare, size_t MaxHeight, uint32_t Seed>
template <typename K, typename Compare = std::less<K>, size_t MaxHeight = 14, uint32_t Seed = 15445>
// 定义一个跳表结构体,里面具有多个节点。
class SkipList {
protected:
struct SkipNode;
public:
// 显式构造函数,将表头初始化成一个具有最高高度的节点。所有的节点都指向NULL。
explicit SkipList(const Compare &compare = Compare{}) {
compare_ = compare;
header_ = std::make_shared<SkipNode>(MaxHeight);
}
// 析构函数。
~SkipList() { Drop(); }
// 删除了拷贝构造函数和移动构造函数,并且禁止了拷贝赋值和移动赋值。
SkipList(const SkipList &) = delete;
auto operator=(const SkipList &) -> SkipList & = delete;
SkipList(SkipList &&) = delete;
auto operator=(SkipList &&) -> SkipList & = delete;
// 一些经典的调表操作。
auto Empty() -> bool;
auto Size() -> size_t;
void Clear();
auto Insert(const K &key) -> bool;
auto Erase(const K &key) -> bool;
auto Contains(const K &key) -> bool;
void Print();
protected:
auto Header() -> std::shared_ptr<SkipNode> { return header_; }
private:
// 随机生成高度。
auto RandomHeight() -> size_t;
void Drop(); // 按照顺序删除整个跳表。
static constexpr size_t LOWEST_LEVEL = 0;
Compare compare_;
std::shared_ptr<SkipNode> header_;
uint32_t height_{1};
size_t size_{0};
std::mt19937 rng_{Seed};
std::shared_mutex rwlock_{}; // 读写锁。
};
// 跳表节点的定义。
SKIPLIST_TEMPLATE_ARGUMENTS struct SkipList<K, Compare, MaxHeight, Seed>::SkipNode {
explicit SkipNode(size_t height, K key = K{}) {
links_ = std::vector<std::shared_ptr<SkipNode>>(height, std::shared_ptr<SkipNode>());
key_ = key;
}
auto Height() const -> size_t;
auto Next(size_t level) const -> std::shared_ptr<SkipNode>;
void SetNext(size_t level, const std::shared_ptr<SkipNode> &node);
auto Key() const -> const K &;
std::vector<std::shared_ptr<SkipNode>> links_;
K key_;
};
}
跳表ADS描述
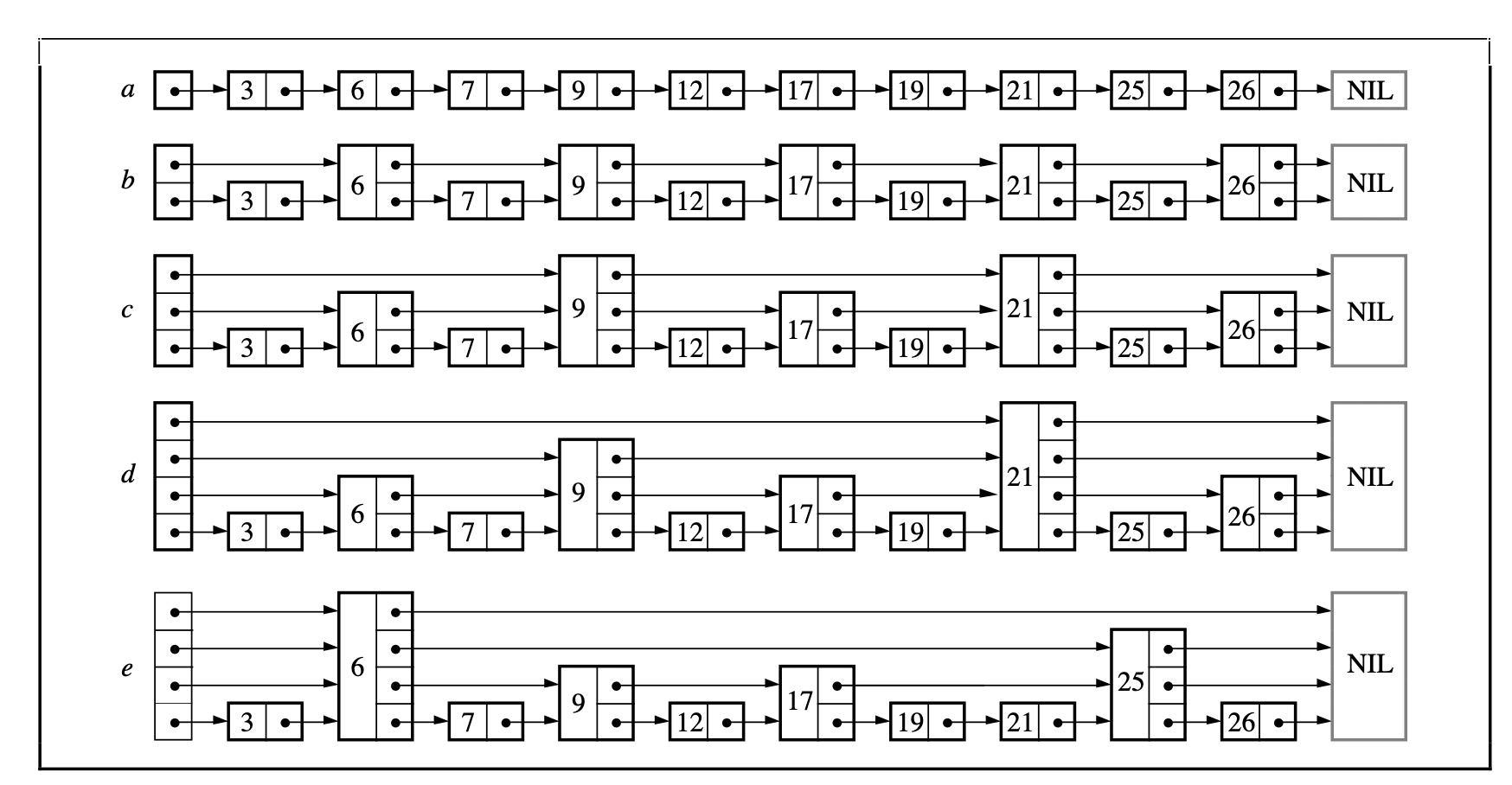
整个跳表可以用这样一张经典的图来概括:
初始化
我们首先需要对跳表进行初始化,规定头结点的最高高度后(采用模板参数定义为14),生成头结点。这样我们就有构造函数,生成跳表的比较规则(跳表内部是有序的),:
explicit SkipList(const Compare &compare = Compare{}) {
compare_ = compare;
header_ = std::make_shared<SkipNode>(MaxHeight);
}
explicit SkipNode(size_t height, K key = K{}) {
links_ = std::vector<std::shared_ptr<SkipNode>>(height, std::shared_ptr<SkipNode>());
key_ = key;
}
这样,我们在跳表数据结构中生成了头结点(是一个指向跳表节点的共享指针)。调用跳表节点的构造函数生成了一个高度为14,所有的节点都指向空节点的指针。
搜索
我们的搜索函数用于判断跳表中是否存在一个声称的节点。通过函数Contains进行。函数声明如下:
auto Contains(const K &key) -> bool;
在执行搜索的时候,我们需要自上而下地进行搜索。此处需要使用双指针的经典想法。我们定义两个指针cur和forward进行搜索。跳表内部的节点是具有顺序的,因此我们可以进行如下操作:
- 当forward指针的值小于目标值时,我们继续将两个指针向前移动。
- 当forward指针的值大于目标值的时候,我们将降低搜索高度,重新获取cur和forward指针,在新的高度进行搜索。
- 直到高度为0时或者找到目标值为止。
SKIPLIST_TEMPLATE_ARGUMENTS auto SkipList<K, Compare, MaxHeight, Seed>::Contains(const K &key) -> bool {
std::shared_lock lock(rwlock_); // 读写锁。
// 双指针进行搜索。
std::shared_ptr<SkipNode> current_pointer = header_;
std::shared_ptr<SkipNode> forward_pointer;
// 自上而下依次搜索。
for(size_t i = MaxHeight; static_cast<int>(i) >= 0; i--) {
forward_pointer = current_pointer -> Next(i);
// 在当前高度遍历直到寻找到对应值或者到达nullptr。
while(forward_pointer != nullptr && compare_(forward_pointer -> Key(), key) == true) {
current_pointer = forward_pointer;
forward_pointer = forward_pointer -> Next(i);
}
}
current_pointer = forward_pointer;
if(current_pointer == nullptr) {
return false;
}
return static_cast<bool>(compare_(key, current_pointer -> Key()) == false
&& compare_(current_pointer -> Key(), key) == false);
}
插入操作
同样作为链表型数据结构,插入操作就避无可避。这样我们还是需要延用先前的搜索的想法,但相对应有区别的是,插入操作需要改变链表结构,因此添加前驱和后缀节点就需要我们在遍历过程中记录他们。这样我们就需要
- 首先进行contains操作,判断节点是否存在。在contains操作中逐层记录我们需要的前驱和后缀节点信息。
- 如果没有找到当前节点,我们则需要将节点插入到跳表当中,根据先前的操作寻找到我们需要的前驱和后缀信息,将前驱节点指向插入节点,插入节点的后缀指向后缀节点即可。
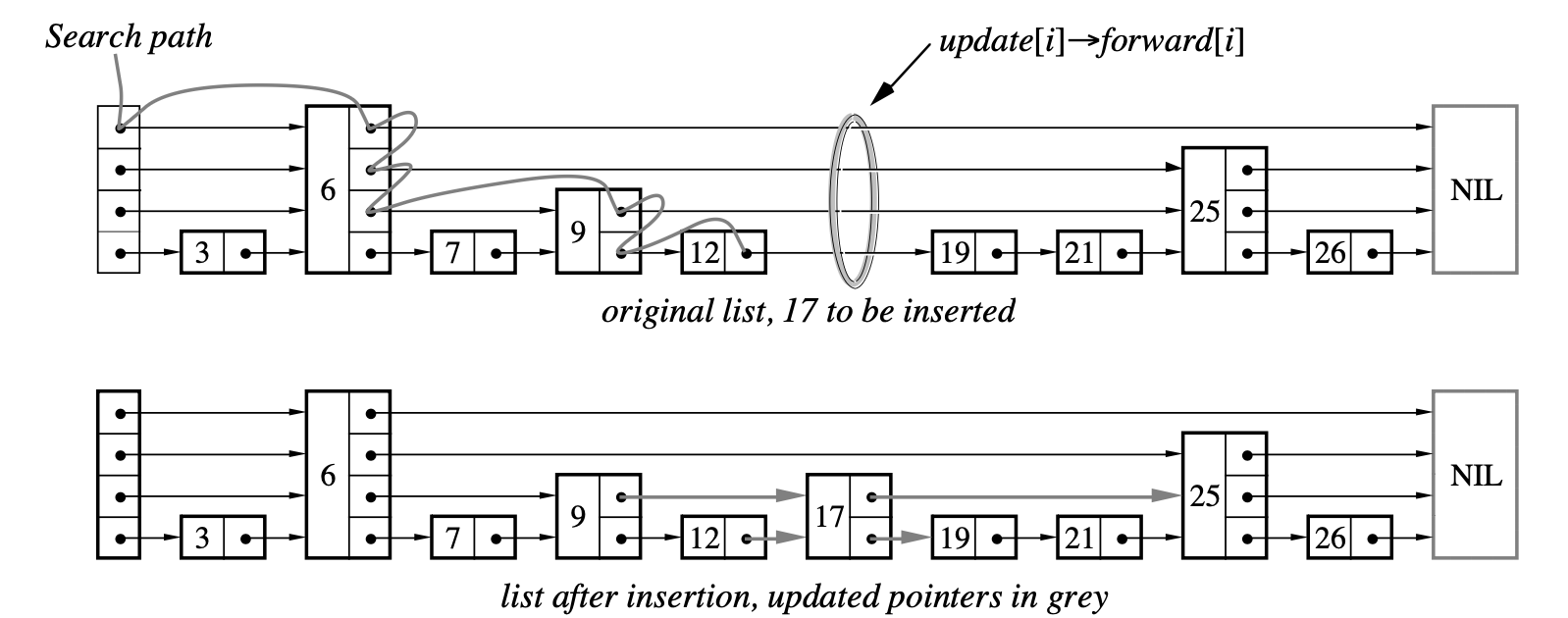
例如上述的图片,我们首先逐层遍历,这样我们的前驱节点自上而下记录为{6,6,9,12},后缀节点记录为{NULL, 25, 25, 19}.这样我们就有:
auto Insert(const K &key) -> bool;
SKIPLIST_TEMPLATE_ARGUMENTS auto SkipList<K, Compare, MaxHeight, Seed>::Insert(const K &key) -> bool {
std::unique_lock lock(rwlock_);
// 分别记录前驱节点和后缀节点。
std::vector<std::shared_ptr<SkipNode>> next_container;
std::vector<std::shared_ptr<SkipNode>> cur_container;
// 还是相同的双指针操作。
std::shared_ptr<SkipNode> current_pointer = header_;
std::shared_ptr<SkipNode> forward_pointer;
for(size_t i = MaxHeight - 1; static_cast<int>(i) >= 0; i--) {
forward_pointer = current_pointer -> Next(i);
// 对每一层进行遍历。
while(forward_pointer != nullptr && compare_(forward_pointer -> Key(), key) == true) {
current_pointer = forward_pointer;
forward_pointer = forward_pointer -> Next(i);
}
cur_container.push_back(current_pointer);
next_container.push_back(forward_pointer);
}
// 寻找到已插入节点时停止操作。
if (forward_pointer != nullptr &&
compare_(forward_pointer->Key(), key) == false &&
compare_(key, forward_pointer->Key()) == false) {
return false;
}
// 随机生成节点的高度,并构造节点。
size_t new_height = RandomHeight();
std::shared_ptr<SkipNode> new_node = std::make_shared<SkipNode>(new_height, key);
// 将节点的前驱和后继相互连接。注意我们的节点存储是自上而下的,因此这里也应该反过来取节点相互连接。
for(size_t i = 0; i < new_height; i++) {
std::shared_ptr<SkipNode> pre_node = cur_container[MaxHeight - 1 - i];
std::shared_ptr<SkipNode> next_node = next_container[MaxHeight - 1 - i];
pre_node -> SetNext(i, new_node);
new_node -> SetNext(i, next_node);
}
size_++;
height_ = height_ > new_height ? height_ : new_height;
return true;
}
生成节点高度
跳表采用随机化的方式为新的节点生成高度,但这样的随机化也存在部分的规则。我们生成高度的方式如下:
- 初始高度为1.
- 生成随机数,随机数的范围在 \([0,1)\) 之间。
- 当随机数小于规定的一个 \(p\) 值时,高度增加直到达到最高的高度。
我们可以采用几何分布的方式进行。这里将会有25%的概率上升高度,也就是 \(p=0.25\)。
SKIPLIST_TEMPLATE_ARGUMENTS auto SkipList<K, Compare, MaxHeight, Seed>::RandomHeight() -> size_t {
// Branching factor (1 in 4 chance), see Pugh's paper.
static constexpr unsigned int branching_factor = 4;
// Start with the minimum height
size_t height = 1;
while (height < MaxHeight && (rng_() % branching_factor == 0)) {
height++;
}
return height;
}
删除操作
也是和上面相同的原理。采用的是搜索+记录的方式进行。也需要同样记录前驱和后继节点。
auto Erase(const K &key) -> bool;
SKIPLIST_TEMPLATE_ARGUMENTS auto SkipList<K, Compare, MaxHeight, Seed>::Erase(const K &key) -> bool {
std::unique_lock lock(rwlock_);
// 记录前驱后继节点。
std::vector<std::shared_ptr<SkipNode>> next_container;
std::vector<std::shared_ptr<SkipNode>> cur_container;
// 双指针流派。
std::shared_ptr<SkipNode> current_pointer = header_;
std::shared_ptr<SkipNode> forward_pointer;
bool found = false;
size_t target_height = 0; // 记录首次发现该节点的高度。删除操作将从这个高度开始。
for(size_t i = MaxHeight; static_cast<int>(i) >= 0; i--) {
forward_pointer = current_pointer -> Next(i);
// 遍历该高度所有节点。
while(forward_pointer != nullptr && compare_(forward_pointer -> Key(), key) == true) {
current_pointer = forward_pointer;
forward_pointer = forward_pointer -> Next(i);
}
if (forward_pointer != nullptr && compare_(forward_pointer -> Key(), key) == false &&
compare_(key, forward_pointer -> Key()) == false) {
found = true;
target_height = std::max(i, target_height);
cur_container.push_back(current_pointer);
next_container.push_back(forward_pointer -> Next(i));
}
}
// 寻找到目标节点,进行删除操作。
if(found == true) {
for(size_t i = target_height; static_cast<int>(i) >= 0; i--) {
current_pointer = cur_container[target_height - i];
forward_pointer = next_container[target_height - i];
current_pointer->SetNext(i,forward_pointer);
}
forward_pointer.reset();
size_--;
}
return found;
}
时空复杂度分析
您好,欢迎来到对数学不好的人最痛苦的地方。
时间复杂度分析
时间复杂度分析首先摆出结论:平均的时间复杂度均为 \(O(\log{n})\).
我们首先根据我们的搜索路径进行反向分析,并且假设我们位于节点 \(x\) 的第 \(i\) 层上。基于我们的假设,我们有:
- 节点无法知道左边节点的高度,以及自身的高度。
- 节点的高度至少为 \(i\)。
- 节点不是头结点。
- 悲观分析:链表无限长,无限高。
这样我们再进行反向追溯我们的搜索路径时,我们就有两种选择:
- 节点的高度为 \(i\), 我们需要向左边前进到同层的前驱节点。
- 节点的高度大于 \(i\), 我们需要继续向上爬升。
这样我们就可以假设一个搜索代价 \(C(k)\),代表的是一条搜索路径在无限高的跳表中下降k层(也就是我们反向追溯上升k层)的期望代价。我们很显然地可以知道,第0层为终点,不再有可能下降。因此我们有:
这样我们代入就可以得到 \(C(k)=\dfrac{k}{p}\)。将我们的悲观分析放宽到一个具有 \(n\) 个元素的链表,这样从第 \(1(0)\) 层到第 \(L(n)(L(n)-1)\) 层的搜索期望上界就是 \(C(L(n)-1) = \dfrac{L(n)-1}{p}\).
接下来我们需要继续回溯直到头结点的最大高度。我们仍然还是拥有两种情况,向左回溯或者向上攀升。我们先考虑向左回溯需要经过多少步,也就是判断 \(L(n)\) 有多少节点。
我们设在 \(L(n)\) 层的期望节点数为 \(1/p\)。根据生成随机高度的规则,每一层的节点有 \(p\) 的概率高升,有 \(1-p\) 的概率原地踏步。这样我们就设 \(E[k]\) 为每层节点的期望数目。我们有:
这样很容易得出 \(L(n) = \log_{\frac{1}{p}}n\). 在 \(L(n)\) 层向左走的期望步数也就是 \(1/p\)。
接下来判断向上走。向上走的概率我们需要计算高于 \(k\) 层的概率是多少,从而计算出最高层数的一个上界。
首先我们需要计算一下节点最高出现在第 \(i\) 层的概率。对于一个节点,它将有 \(\dfrac{1}{p}\) 的概率继续上升,\((1-p)\) 的概率留在此处。这样它需要选择上升 \(i-1\) 次,最后选择不上升。这样我们有:
这样我们就有节点小于等于 \(k\) 的概率为
这样对于一个具有 \(n\) 个节点的跳表来说,\(n\) 个节点都小于等于 \(k\) 的概率为 \((1-p^k)^n\)。这样列表的最高高度大于 \(k\) 的概率为 \(1-(1-p^k)^n\),我们通过近似可以得知其上界为 \(np^k\). 这样对于期望最高层级我们有期望计算。我们需要注意的是 \(np^{L(n)-1}=1/p\).
这样我们还需要攀升 \(\dfrac{1}{1-p}\) 次。
这样我们的总步数就是从1攀升到L-1,L-1向左走和继续向上到达头结点最高点的步数之和。
这样就完成了时间复杂度的证明。
空间复杂度
对于一个跳表,每个节点出现高度为 \(k\) 的概率为 \(p^{k-1}(1-p)\). 这样对于一个节点,其所具有的副本数目为:
这样平均的空间复杂度就是 \(O(n)\)。
应用
在许多DB中,跳表都用来记录有序集合,另辅以哈希集合来记录对元素的映射。例如LevelDB。作为键值储存的Redis也使用跳表来维护有序集合。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号