摩尔信使MThings系列教程27——逻辑控制
逻辑控制功能采用直观的可视化积木搭建方式,
使用户能够轻松实现复杂的数据计算与处理、控制算法设计、控制算法仿真和验证、跨设备数据同步、以及数字和模拟信号处理等工业现场的实时控制任务。
逻辑控制功能通过组件交联图的形式简化了控制流程的设计过程。
在这个框架下,每个组件都配备了输入输出接口,使得不同组件之间可以通过这些接口进行灵活的连接,
实现模拟量和数字量的顺畅传输,用户能够更加直观和便捷地搭建起整个控制系统。
下图是一个简单示例:
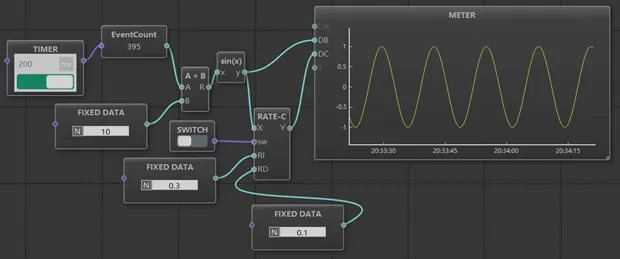
组件提供输入接口(左侧)和输出接口(右侧),接口类型又分为数字量接口和模拟量接口,不同类型接口间不能直连。
全局快捷操作包括:
- 多个组件选择:Shift+鼠标框选
- 全选组件:Ctrl+A
- 取消上一次操作:Ctrl+Z
- 复制组件:Ctrl+C
- 粘贴组件:Ctrl+V
- 快速复制组件:Ctrl+D
- 删除组件:Delete按键
- 取消组件选择:Esc按键
- 缩放画布:鼠标滚轮
模拟量输入(AI)
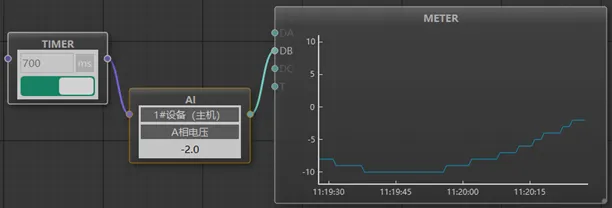
获取设备实时采集数据,并导入逻辑流程,支持数字量驱动刷新
[输入]信号触发 数字量 触发一次,刷新一次
[输出]模拟量 模拟量 模拟量设备数据
数字量输入(DI)
[输入]信号触发 数字量 触发一次,刷新一次
[输出]信号量 数字量 数字量设备数据(0、1)
模拟量输出 (AO)
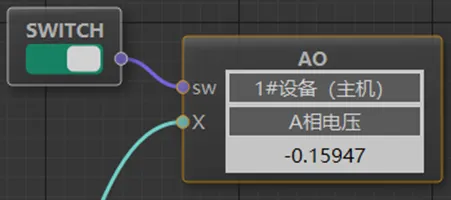
以模拟量/数字量形式写入设备指令数据
[输入]使能开关 数字量 使能后执行写指令
[输入]模拟量指令 模拟量 模拟量设备指令
数字量输出(DO)
[输入]使能开关 数字量 使能后执行写指令
[输入]数字量指令 数字量 数字量设备指令
位置式PID(PID(Pos))
增量式PID (PID(Incr))
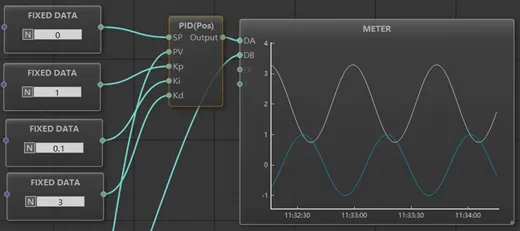
位置式PID控制器通过计算偏差的当前值来调整控制量,而增量式PID控制器则通过计算偏差的增量来调整控制量。
[输入]SP 模拟量 控制目标值
[输入]PV 模拟量 采样值/反馈值,应连接一路“模拟量输入”
[输入]Kp 模拟量 比例增益
[输入]Ki 模拟量 积分增益
[输入]Kd 模拟量 微分增益
[输出]Output 模拟量 设定值,应连接一路“模拟量输出”
越限监控(H/L)
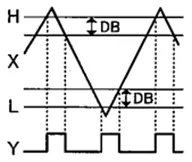
根据设定的模拟量上限、下限、死区参数,判定一路模拟量输入是否越限,如越限,输出高电平数字量(1),反之,输出低电平数字量(0)。
[输入]H 模拟量 设定上限值
[输入]L 模拟量 设定下限值
[输入]DB 模拟量 设定死区值
[输入]X 模拟量 待判定的模拟量
[输出]Y 数字量 判定结果
变化率监控 (RATE-M)
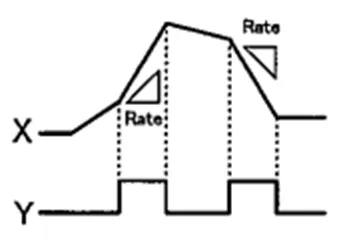
判定一路模拟量的变化率是否大于设定值。变化率包括上升率和下降率,单位:1/秒。
[输入]R 模拟量 设定变化率
[输入]X 模拟量 待判定的模拟量
[输出]Y 数字量
是,输出高电平(1)
否,输出低电平(0)
冗余控制 (M/N)
通过设置数字量输入总数N和激活个数M,可实现多路数字量冗余控制。
[输入]X1~X6 数字量 用户可指定有效数字量输入路数N
[输出]Y 数字量 当M路同时为高电平时,输出高电平,否则输出低电平。
限幅器 (LIMITER)
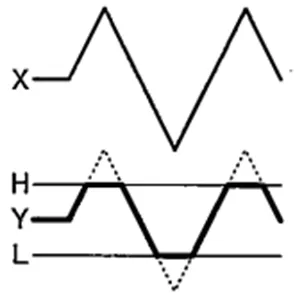
根据设定的幅值上限和下限,控制一路输入模拟量,使得输出数据削峰填谷。
[输入]H 模拟量 设定上限值
[输入]L 模拟量 设定下限值
[输入]X 模拟量 待处理的模拟量
[输出]Y 模拟量 处理后的模拟量
斜率控制器 (RATE-C)
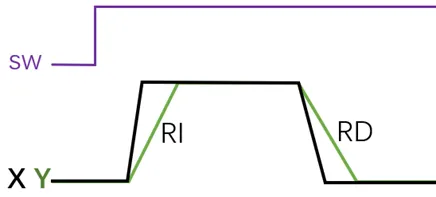
为确保输出变量的变化速率保持在预定的范围内,通过限制输入模拟量的变化速度,防止系统因快速变化而产生过冲或不稳定,从而保护系统免受急剧变化的影响,确保系统的平滑和稳定运行。
[输入]X 模拟量 待处理的模拟量
[输入]RI 模拟量 设定的最大上升率(1/秒)
[输入]RD 模拟量 设定的最大下降率(1/秒)
[输入]sw 数字量 使能开关
[输出]Y 模拟量 处理后的模拟量
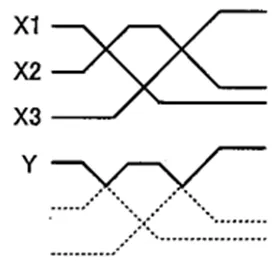
多段线控制 (FX)
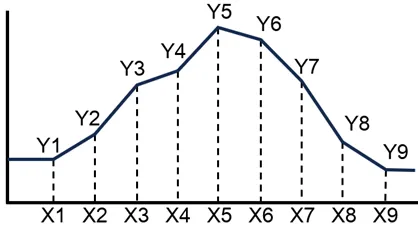
该组件可更加灵活地调整输出,实现更加精细和个性化的控制效果。组件通过预定义到一组坐标点(Xn, Yn)实现线性映射。运行过程中,组件根据输入的模拟量X,在预设的多段线中寻找对应的Y值,从而动态地生成控制指令。
[输入]X 模拟量 待处理的模拟量
[输出]Y 模拟量 根据多段线映射出的Y值
当X<X1时,Y=Y1;
当X>X9时,Y=Y9;
固定数值 (FIXED DATA)
组件可向其他组件提供必要的固定数值,如系数、参数等。用户修改后需要点击确认按钮方能生效。用户可点击“N”按钮,增加数据名称。
[输入]信号触发 数字量 触发一次,刷新一次
[输出]模拟量 模拟量 用户设置的固定数值
定时器 (TIMER)
该组件一般作为逻辑控制的起点,提供指定周期(间隔)触发信号。设置范围:10ms~600秒。单位可切换为毫秒或秒
[输入]启动开关 数字量 用于群控定时器;高电平为启动;低电平为关闭;
[输出]信号触发 数字量 周期触发信号
开关 (SWITCH)
该组件根据用户的手动操作持续输出高电平或低电平数字量。
[输出]开关信号 数字量 用户指定到高低电平信号
脉冲按钮(BTN-P)
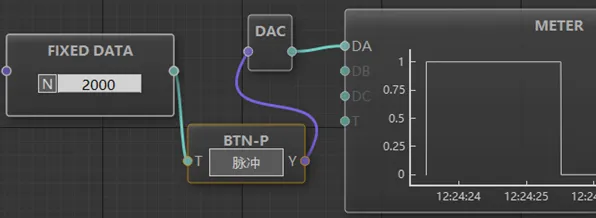
该组件提供用户操作按钮,支持用户手动触发脉冲信号(低->高->低),高电平持续时间可设置。
[输入]T 模拟量 高电平持续时间
单位:ms;
范围:>10ms;
默认:100ms。
[输出]Y 数字量 高电平脉冲信号
脉冲发生器(GEN-P)
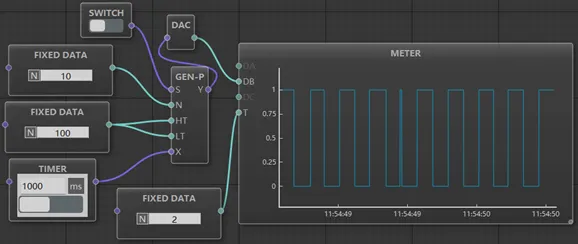
该组件提供脉冲生成功能,用户可自定义脉冲形态,获得高度定制化脉冲信号。
[输入]S 数字量
设定初始电平
(高:1,低:0)
[输入]N 模拟量
设定输出高低电平个数
2~10000
[输入]HT 模拟量
高电平持续时间
1~100000ms
[输入]LT 模拟量
低电平持续时间
1~100000ms
[输入]X 数字量
启动信号
[输出]Y 数字量
脉冲信号
数据标签 (TAG)
接收并显示一路模拟量的数值。
[输入]数据 模拟量 接收待显示的模拟量
流程终止 (END)
显示标识当前分支结束,无操作。
[输入]END 模拟量 无处理
示波器 (METER)
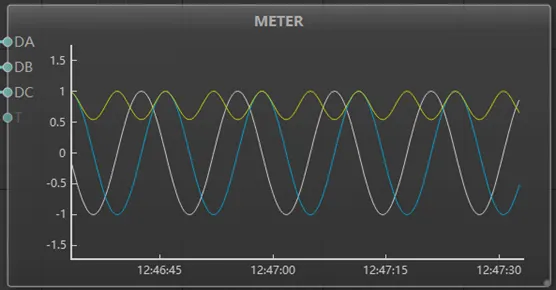
支持多路模拟量数据持续录波,可设置时间轴范围,随数值自动调整纵轴范围。可调整窗口大小。
[输入]DA 模拟量 A路数据,颜色:白色
[输入]DB 模拟量 B路数据,颜色:蓝色
[输入]DC 模拟量 C路数据,颜色:黄色
[输入]T 模拟量
时间轴的时间跨度
单位:秒
默认:60秒
范围:1~6000秒
静态文本 (TEXT)
用于标注逻辑控制流程中需要说明的信息,双击后修改内容。
警告标识
用于可视化控制流程中数字量标识的异常。
[输入]触发信号 数字量
高电平:标识红色
低电平:清除红色
延时器 (DELAY)
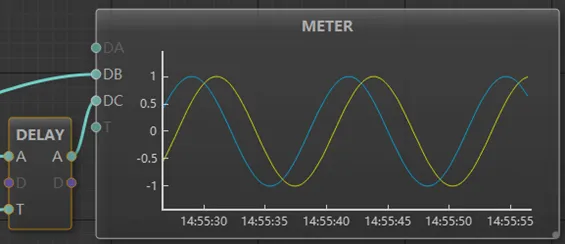
根据设定的延时时间,控制输入数据完成时间偏移。
[输入]A 模拟量 待处理的模拟量
[输入]D 数字量 待处理的数字量
[输入]T 模拟量 偏移时间参数
单位:ms
默认:0 ms
范围:10~6000ms
[输出]A 模拟量 处理后的模拟量
[输出]D 数字量 处理后的数字量
等待 (WAIT)
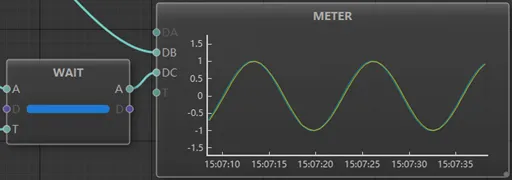
根据设定的等待时间,挂起当前处理流程,直至等待时间结束后,组件自动将输入数据(最新)转发至输出接口。该组件可用于对高频数据进行抽样过滤。等待时间不宜接近或大于定时器周期。
[输入]A 模拟量 待处理的模拟量
[输入]D 数字量 待处理的数字量
[输入]T 模拟量 等待时间参数
单位:ms
默认:0 ms
范围:10~6000ms
[输出]A 模拟量 处理后的模拟量
[输出]D 数字量 处理后的数字量
事件计数器(EventCount)
计数输入的信号触发次数,并将结果更新至输出接口
[输入]信号触发 数字量 无论高低电平,都会被计数
[输出]计数结果 模拟量 被触发的次数
数据累加器 (ADD-UP)
从0开始,累加每次输入接口触发的数据。
[输入]输入数据 模拟量
[输出]累加结果 模拟量
多路数值选择器(DATA-MUX)
提供多个模拟信号输入,并输出最近一次触发的模拟信号。
[输入]/[输出] 模拟量
多路事件选择器 (BIT-MUX)
提供多个数字信号输入,并输出最近一次触发的数字信号。
[输入]/[输出] 数字量
数据暂存器 (BUFFER)
提供模拟量数据缓存功能,根据功能开关状态,更新至输出接口。
[输入]X 模拟量 待缓存的模拟量数据
[输入]sw 数字量 输出开关
[输出]Y 模拟量 输出模拟量数据
DAC
模数转换,将数字量转换为模拟量
[输入]数字信号 数字量 待处理的数字量
[输出]模拟数据 模拟量 0、1
高值选择器 (>H)
持续识别三路模拟量输入,将最大值刷新至输出接口。至少存在一路有效输入。
[输入]X1 模拟量
[输入]X2 模拟量
[输入]X3 模拟量
[输出]Y 模拟量
低值选择器 (>L)
持续识别三路模拟量输入,将最小值刷新至输出接口。至少存在一路有效输入。
[输入]X1 模拟量
[输入]X2 模拟量
[输入]X3 模拟量
[输出]Y 模拟量
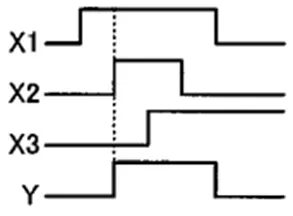
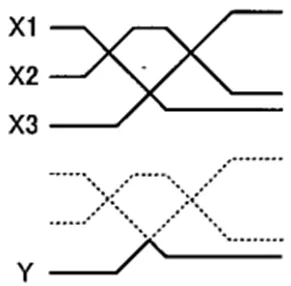
中值选择器(MED)
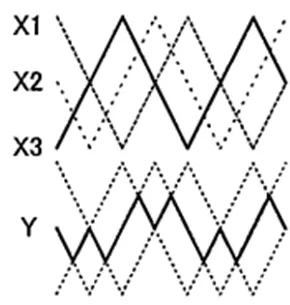
持续识别三路模拟量输入,将中间值刷新至输出接口。三路必须同时具备有效输入,否则无输出。
[输入]X1 模拟量
[输入]X2 模拟量
[输入]X3 模拟量
[输出]Y 模拟量
模拟通道开关(SW_A)
一路数字量开关控制两路输入模拟量,输出模拟量:
sw=0:Y=X1
sw=1:Y=X2
[输入]sw 数字量
[输入]X1 模拟量
[输入]X2 模拟量
[输出]Y 模拟量
数字通道开关(SW_D)
一路数字量开关控制两路输入数字量,输出数字量:
sw=0:Y=X1
sw=1:Y=X2
[输入]sw 数字量
[输入]X1 数字量
[输入]X2 数字量
[输出]Y 数字量
与(AND)、或(OR)、非(NOT)、异或(XOR)
逻辑门处理
与Y = X1 AND X2
或Y = X1 OR X2
非Y = NOT X1
异或 Y = X1 XOR X2
[输入]X1 数字量
[输入]X2 数字量
[输出]Y 数字量
设置优先(SET-P)
组件根据预定的“设置信号”优先规则来响应输入信号。即使同一时刻较低优先级的“重置信号”存在,组件确保按照重要性顺序输出信号,保障过程的安全性。
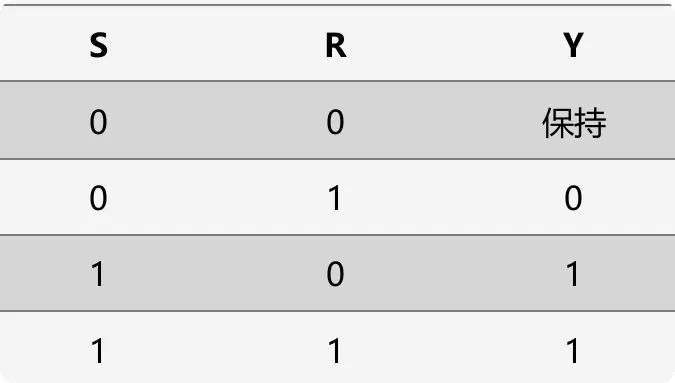
[输入]S 数字量 设置信号
[输入]R 数字量 重置信号
[输出]Y 数字量 输出信号
重置优先 (RESET-P)
组件根据预定的“设置信号”优先规则来响应输入信号。即使同一时刻较低优先级的“重置信号”存在,组件确保按照重要性顺序输出信号,保障过程的安全性。
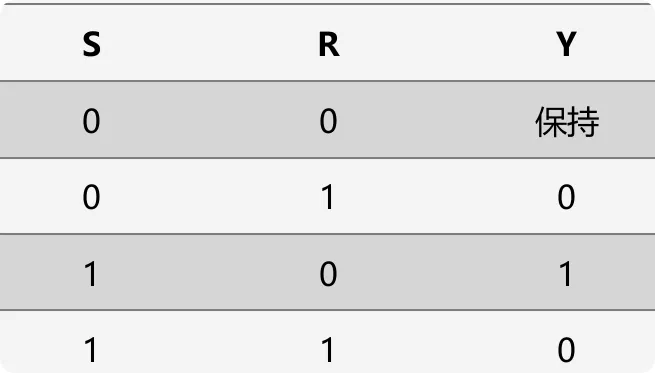
[输入]S 数字量 设置信号
[输入]R 数字量 重置信号
[输出]Y 数字量 输出信号
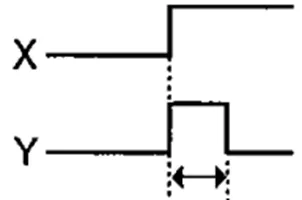
延时开启 (DELAY-ON)
检测输入数字量X,识别上升沿(0->1),按照设定的时间T,延迟输出上升沿。若输入数字量在T时间内未保持高电平,则不输出上升沿。
[输入]T 模拟量
延时时间
单位:ms
默认值:无效
范围:0~6000ms
[输入]X 数字量
[输出]Y 数字量
延时关闭 (DELAY-OFF)
检测输入数字量X,识别下降沿(1->0),按照设定的时间T,延迟输出下降沿。若输入数字量在T时间内未保持低电平,则不输出下降沿。
[输入]T 模拟量
延时时间
单位:ms
默认值:无效
范围:0~6000ms
[输入]X 数字量
[输出]Y 数字量
延迟清除 (DELAY-C)
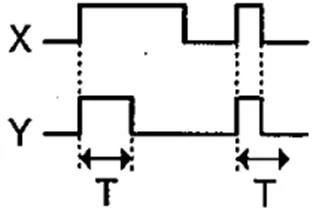
检测输入数字量X,识别上升沿(0->1),输出立即跟随上升沿。按照设定的时间T,到期后输出下降沿。若输入信号在T时间内出现下降沿,立即输出下降沿。
[输入]T 模拟量 延时时间
单位:ms
默认值:无效
范围:0~6000ms
[输入]X 数字量
[输出]Y 数字量
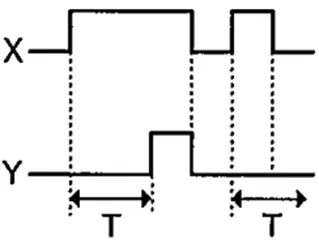
上升沿脉冲 (RISE-P)
检测输入数字量X,识别上升沿(0->1),立即输出电平脉冲信号,脉冲持续时间与设定的时间T保持一致。
[输入]T 模拟量 脉冲持续时间
单位:ms
默认值:无效
范围:0~6000ms
[输入]X 数字量
[输出]Y 数字量
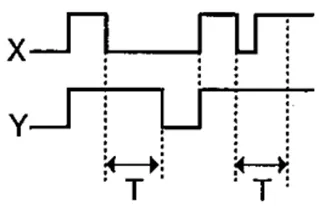
下降沿脉冲 (FALL-P)
检测输入数字量X,识别下降沿(1->0),立即输出电平脉冲信号,脉冲持续时间与设定的时间T保持一致。
[输入]T 模拟量 脉冲持续时间
单位:ms
默认值:无效
范围:0~6000ms
[输入]X 数字量
[输出]Y 数字量
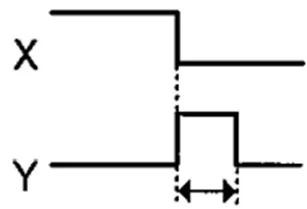
状态判断 (BIT)
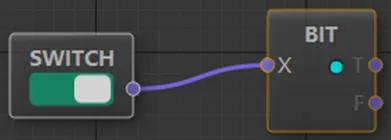
检测输入数字量X,可视化标识信号的高低电平状态,并给出两路(T、F)数字量输出。
[输入]X 数字量 输入数字量
[输出]T 数字量 X=1时,T=1;
[输出]F 数字量 X=0时,F=1;
数字和、差、积、商
模拟量基础运算组件
[输入]A 模拟量
[输入]B 模拟量
[输出]R 模拟量
取模(整形)
求余数运算:R = A % B
[输入]A 模拟量
[输入]B 模拟量
[输出]R 模拟量
取模(浮点)
求余数运算:R = mod(A, B)
[输入]A 模拟量
[输入]B 模拟量
[输出]R 模拟量
绝对值
y = abs(x)
[输入]x 模拟量
[输出]y 模拟量
取反
y = -x
[输入]x 模拟量
[输出]y 模拟量
正弦函数 余弦函数 正切函数 余切函数
三角函数运算操作,输入均为弧度数据。
[输入]x 模拟量
[输出]y 模拟量
平方根
[输入]x 模拟量
[输出]y 模拟量
指数函数
[输入]A 模拟量
[输入]B 模拟量
[输出]R 模拟量
对数函数
[输入]A 模拟量
[输入]B 模拟量
[输出]R 模拟量
对数函数 (log10)
[输入]x 模拟量
[输出]y 模拟量
对数函数 (ln)
[输入]x 模拟量
[输出]y 模拟量
比较器(>)
比较两个模拟量数值,并给出两路数字量结果。一般用于控制流分支处理。
[输入]A 模拟量
[输入]B 模拟量
[输出]T 数字量 A>B时,T=1;
[输出]F 数字量 A≤B时,F=1;
比较器(≥)
比较两个模拟量数值,并给出两路数字量结果。一般用于控制流分支处理。
[输入]A 模拟量
[输入]B 模拟量
[输出]T 数字量 A≥B时,T=1;
[输出]F 数字量 A<B时,F=1;
比较器(=)
比较两个模拟量数值,并给出两路数字量结果。一般用于控制流分支处理。
[输入]A 模拟量
[输入]B 模拟量
[输出]T 数字量 A = B时,T=1;
[输出]F 数字量 A != B时,F=1;
比较器(介于)
比较三个模拟量数值,并给出两路数字量结果。一般用于控制流分支处理。
[输入]A 模拟量
[输入]B 模拟量
[输入]C 模拟量
[输出]T 数字量 A ≤ C ≤ B时,T=1;
[输出]F 数字量 C < A, C > B时,F=1;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号