
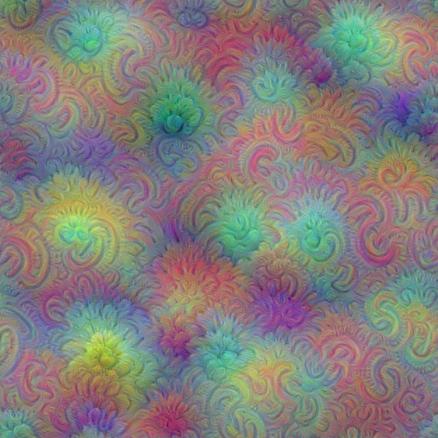
我们看到,利用TensorFlow 和训练好的Googlenet 可以生成多尺度的pattern,那些pattern看起来比起单一通道的pattern你要更好,但是有一个问题就是多尺度的pattern里高频分量太多,显得图像的噪点很多,为了解决这个问题,可以进一步的引入一个先验平滑函数,这样每次迭代的时候可以对图像进行模糊,去除高频分量,这样一般来说需要更多的迭代次数,另一种方式就是每次迭代中增强低频分量的梯度,这种技术被称为: 拉普拉斯金字塔分解,这里我们就要用到这种技术,我们称为:Laplacian Pyramid Gradient Normalization,利用LPGN,可以使生成的多尺度pattern图像更加平滑:
Laplacian Pyramid Gradient Normalization
# boilerplate code
from __future__ import print_function
import os
from io import BytesIO
import numpy as np
from functools import partial
import PIL.Image
from IPython.display import clear_output, Image, display, HTML
import tensorflow as tf
# !wget https://storage.googleapis.com/download.tensorflow.org/models/inception5h.zip && unzip inception5h.zip
model_fn = 'tensorflow_inception_graph.pb'
# creating TensorFlow session and loading the model
graph = tf.Graph()
sess = tf.InteractiveSession(graph=graph)
with tf.gfile.FastGFile(model_fn, 'rb') as f:
graph_def = tf.GraphDef()
graph_def.ParseFromString(f.read())
t_input = tf.placeholder(np.float32, name='input') # define the input tensor
imagenet_mean = 117.0
t_preprocessed = tf.expand_dims(t_input-imagenet_mean, 0)
tf.import_graph_def(graph_def, {'input':t_preprocessed})
layers = [op.name for op in graph.get_operations() if op.type=='Conv2D' and 'import/' in op.name]
feature_nums = [int(graph.get_tensor_by_name(name+':0').get_shape()[-1]) for name in layers]
print('Number of layers', len(layers))
print('Total number of feature channels:', sum(feature_nums))
# Picking some internal layer. Note that we use outputs before applying the ReLU nonlinearity
# to have non-zero gradients for features with negative initial activations.
layer = 'mixed4b_3x3_bottleneck_pre_relu'
channel = 24 # picking some feature channel to visualize
# start with a gray image with a little noise
img_noise = np.random.uniform(size=(224,224,3)) + 100.0
def showarray(a, fmt='jpeg'):
a = np.uint8(np.clip(a, 0, 1)*255)
f = BytesIO()
PIL.Image.fromarray(a).save(f, fmt)
display(Image(data=f.getvalue()))
def visstd(a, s=0.1):
# Normalize the image range for visualization
return (a-a.mean())/max(a.std(), 1e-4)*s + 0.5
def T(layer):
# Helper for getting layer output tensor
return graph.get_tensor_by_name("import/%s:0"%layer)
def tffunc(*argtypes):
# Helper that transforms TF-graph generating function into a regular one.
# See "resize" function below.
placeholders = list(map(tf.placeholder, argtypes))
def wrap(f):
out = f(*placeholders)
def wrapper(*args, **kw):
return out.eval(dict(zip(placeholders, args)), session=kw.get('session'))
return wrapper
return wrap
# Helper function that uses TF to resize an image
def resize(img, size):
img = tf.expand_dims(img, 0)
return tf.image.resize_bilinear(img, size)[0,:,:,:]
resize = tffunc(np.float32, np.int32)(resize)
def calc_grad_tiled(img, t_grad, tile_size=512):
# Compute the value of tensor t_grad over the image in a tiled way.
# Random shifts are applied to the image to blur tile boundaries over
# multiple iterations.
sz = tile_size
h, w = img.shape[:2]
sx, sy = np.random.randint(sz, size=2)
img_shift = np.roll(np.roll(img, sx, 1), sy, 0)
grad = np.zeros_like(img)
for y in range(0, max(h-sz//2, sz),sz):
for x in range(0, max(w-sz//2, sz),sz):
sub = img_shift[y:y+sz,x:x+sz]
g = sess.run(t_grad, {t_input:sub})
grad[y:y+sz,x:x+sz] = g
return np.roll(np.roll(grad, -sx, 1), -sy, 0)
# Laplacian Pyramid Gradient Normalization
k = np.float32([1,4,6,4,1])
k = np.outer(k, k)
k5x5 = k[:,:,None,None]/k.sum()*np.eye(3, dtype=np.float32)
def lap_split(img):
# Split the image into lo and hi frequency components
with tf.name_scope('split'):
lo = tf.nn.conv2d(img, k5x5, [1,2,2,1], 'SAME')
lo2 = tf.nn.conv2d_transpose(lo, k5x5*4, tf.shape(img), [1,2,2,1])
hi = img-lo2
return lo, hi
def lap_split_n(img, n):
# Build Laplacian pyramid with n splits
levels = []
for i in range(n):
img, hi = lap_split(img)
levels.append(hi)
levels.append(img)
return levels[::-1]
def lap_merge(levels):
# Merge Laplacian pyramid
img = levels[0]
for hi in levels[1:]:
with tf.name_scope('merge'):
img = tf.nn.conv2d_transpose(img, k5x5*4, tf.shape(hi), [1,2,2,1]) + hi
return img
def normalize_std(img, eps=1e-10):
# Normalize image by making its standard deviation = 1.0
with tf.name_scope('normalize'):
std = tf.sqrt(tf.reduce_mean(tf.square(img)))
return img/tf.maximum(std, eps)
def lap_normalize(img, scale_n=4):
# Perform the Laplacian pyramid normalization
img = tf.expand_dims(img,0)
tlevels = lap_split_n(img, scale_n)
tlevels = list(map(normalize_std, tlevels))
out = lap_merge(tlevels)
return out[0,:,:,:]
def render_lapnorm(t_obj, img0=img_noise, visfunc=visstd,
iter_n=10, step=1.0, octave_n=3, octave_scale=1.4, lap_n=4):
t_score = tf.reduce_mean(t_obj) # defining the optimization objective
t_grad = tf.gradients(t_score, t_input)[0] # behold the power of automatic differentiation!
# build the laplacian normalization graph
lap_norm_func = tffunc(np.float32)(partial(lap_normalize, scale_n=lap_n))
img = img0.copy()
for octave in range(octave_n):
if octave>0:
hw = np.float32(img.shape[:2])*octave_scale
img = resize(img, np.int32(hw))
for i in range(iter_n):
g = calc_grad_tiled(img, t_grad)
g = lap_norm_func(g)
img += g*step
print('.', end = ' ')
clear_output()
showarray(visfunc(img))
render_lapnorm(T(layer)[:,:,:,channel])
# render_lapnorm(T(layer)[:,:,:,65])
# render_lapnorm(T('mixed3b_1x1_pre_relu')[:,:,:,101])
# render_lapnorm(T(layer)[:,:,:,65]+T(layer)[:,:,:,139], octave_n=4)
生成的效果图如下所示:

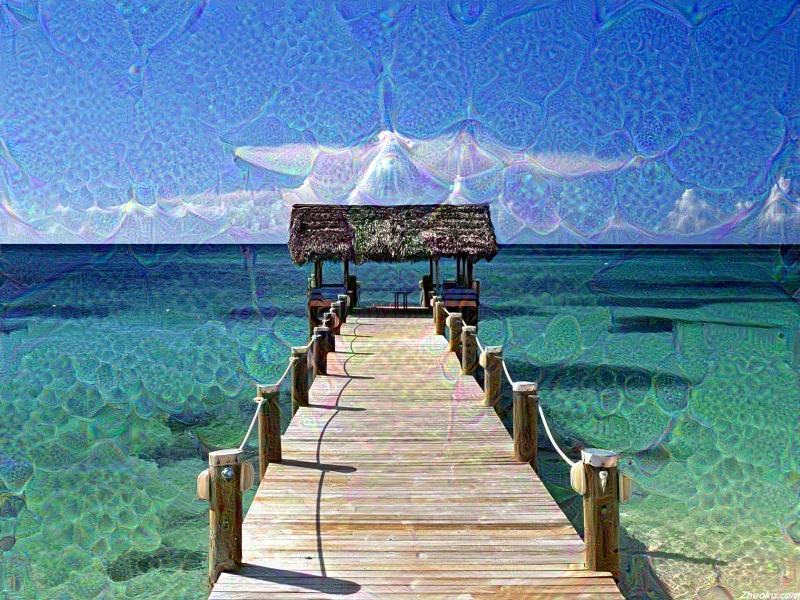
Deepdream
最后,我们再来看看Deep dream的生成,
def render_deepdream(t_obj, img0=img_noise,
iter_n=10, step=1.5, octave_n=4, octave_scale=1.4):
t_score = tf.reduce_mean(t_obj) # defining the optimization objective
t_grad = tf.gradients(t_score, t_input)[0] # behold the power of automatic differentiation!
# split the image into a number of octaves
img = img0
octaves = []
for i in range(octave_n-1):
hw = img.shape[:2]
lo = resize(img, np.int32(np.float32(hw)/octave_scale))
hi = img-resize(lo, hw)
img = lo
octaves.append(hi)
# generate details octave by octave
for octave in range(octave_n):
if octave>0:
hi = octaves[-octave]
img = resize(img, hi.shape[:2])+hi
for i in range(iter_n):
g = calc_grad_tiled(img, t_grad)
img += g*(step / (np.abs(g).mean()+1e-7))
print('.',end = ' ')
clear_output()
showarray(img/255.0)
img0 = PIL.Image.open('1.jpg')
img0 = np.float32(img0)
showarray(img0/255.0)
# render_deepdream(T(layer)[:,:,:,139], img0)
# render_deepdream(tf.square(T('mixed4c')), img0)原图如下所示:

生成的效果图如下所示:

参考来源

 浙公网安备 33010602011771号
浙公网安备 33010602011771号