动作捕捉用于仿生机器人的运动规划
随着机器人、三维动画、虚拟现实等产业的发展,关于仿生机器人的动作研究早已成为重要的热点课题。如何让机器人或虚拟人物做出合理、流畅的姿态呢?这就要涉及到逆运动学算法研究。
人体很复杂,传统算法需优化
由于人体逆运动学问题十分复杂,传统算法普遍面临两大难题:要么在反复迭代后求得的解准确度不高;要么只能求得特定情况下的参数。如何获得一种更普遍适用、结果更精准、过程更快速的算法成为了研究者的热门课题。
利用动作捕捉,将复杂人体转化为关节模型
人体如此复杂,研究者往往会根据关节将其分别视为若干部分。因此,能否获得精准、详细的动作数据,建立准确的关节模型,成了研究的必备基础。而光学动作捕捉系统凭借其高精准度、高实时性、让捕捉对象可以自由运动的特性,成为了此类研究的首选。
在中原工学院电子信息学院针对逆运动学算法的研究中,研究者利用NOKOV度量光学三维动作捕捉系统,获取精度达1mm的人体下肢运动数据,并建立了准确的关节模型。
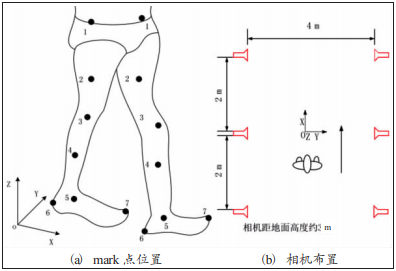
实验现场的marker与动作捕捉镜头布置示意图
实验中的动作捕捉系统主要由6个NOKOV Mars 2H镜头、分配在下肢主要关节处的marker、三维测力平台、定位杆和校正杆等组成。在约为7M×5M的实验环境中,动作捕捉系统以每秒100帧的速率记录着所有mark点的空间坐标。

中原工学院实验现场
研究关节模型,让机器人更加灵动
在建立关节模型之后,研究人员结合循环坐标下降(CCD)算法和BFGS算法,利用动作捕捉得到的人体运动数值,计算出可以满足实际动作要求的关节旋转角度,其误差阈值和平均执行时间都明显优于传统算法。
光学动作捕捉系统基于其精准性、实时性和灵活适用性,对仿生机器人领域的学科研究和行业应用都能提供有力的支持,助力机器人迈出突破性的步伐。
该用户已根据该实验发表了论文,证明了实验的有效性:
[1]蔡飞,胡宁宁,卢俊兰.基于人体运动建模的逆运动学算法研究[J].企业科技与发展,2019(03):76-78.
[2]王瑷珲,胡宁宁,喻俊,卢俊兰,葛祎霏.基于步态数据的机器人鲁棒自适应PD控制[J/OL].控制工程:1-9[2022-10-21].DOI:10.14107/j.cnki.kzgc.20190609.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号