边缘检测(Edge Detection)
文章首发:xmoon.info
边缘提取
在大多数时候图像的边缘可以承载大部分的信息,并且提取边缘可以除去很多干扰信息,提高处理数据的效率
目标:
识别图像中的突然变化(不连续)
- 图像的大部分语义信息和形状信息都可以编码在边缘上
- 理想:艺术家使用线条勾勒画(但艺术家也使用对象层次的知识)
边缘的种类
- 表面形状的突变
- 深度方向的不连续
- 表面颜色的突变
- 光线阴影的不连续
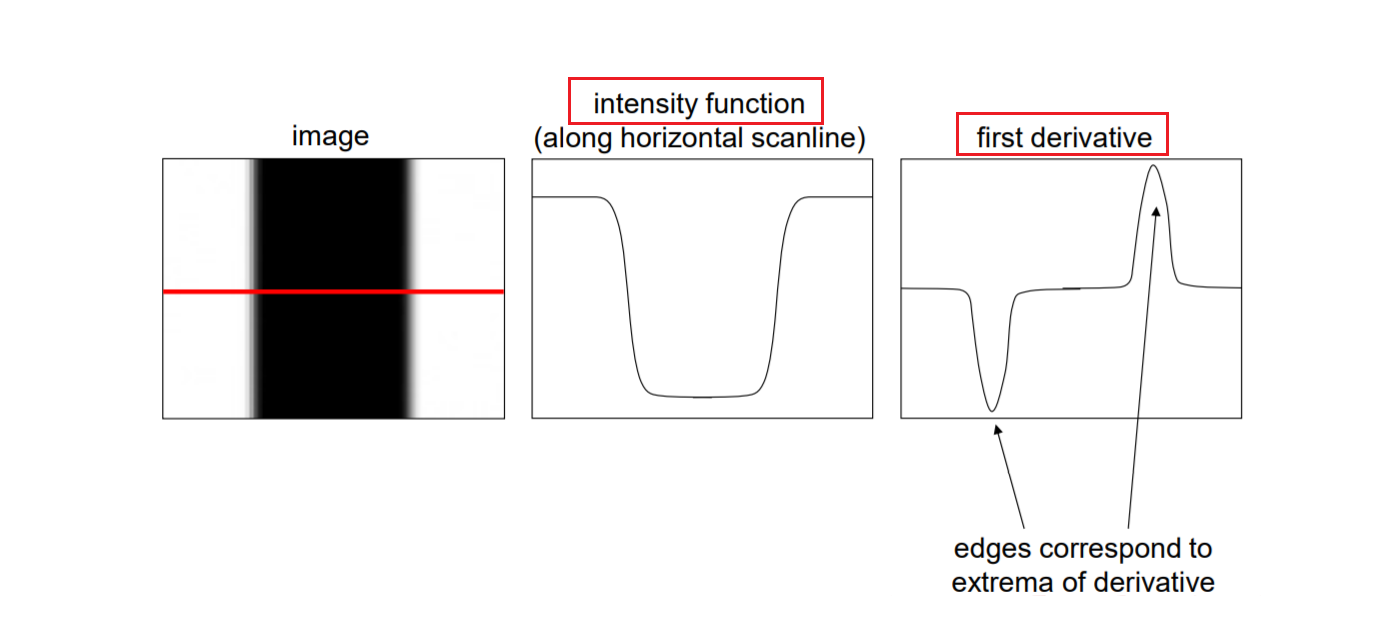
边缘的特征
边缘是图像强度函数中快速变化的地方,变化的地方就存在梯度,对灰度值求导,导数为0的点即为边界点
卷积的导数
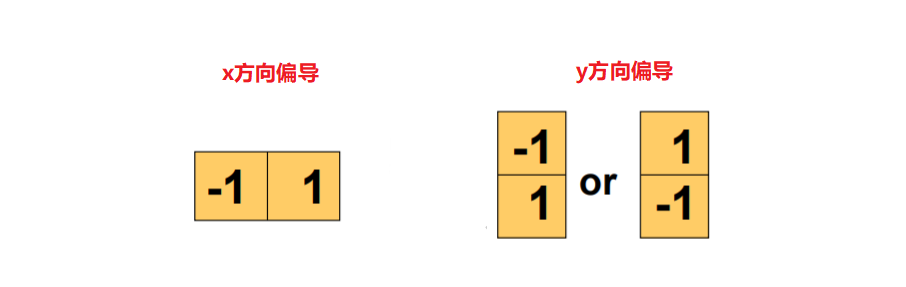
- 偏导数公式:
\[\frac {\partial f(x,y)}{\partial x} = \lim_{\varepsilon \rightarrow 0} \frac{f(x+\varepsilon ,y)-f(x,y)}{\varepsilon}
\]
- 在卷积中为描述数据,采取 近似化处理:
\[\frac {\partial f(x,y)}{\partial x} \approx \frac{f(x+1,y)-f(x,y)}{1}
\]
显然在x方向的导数就是与该像素自身与右边相邻像素的差值
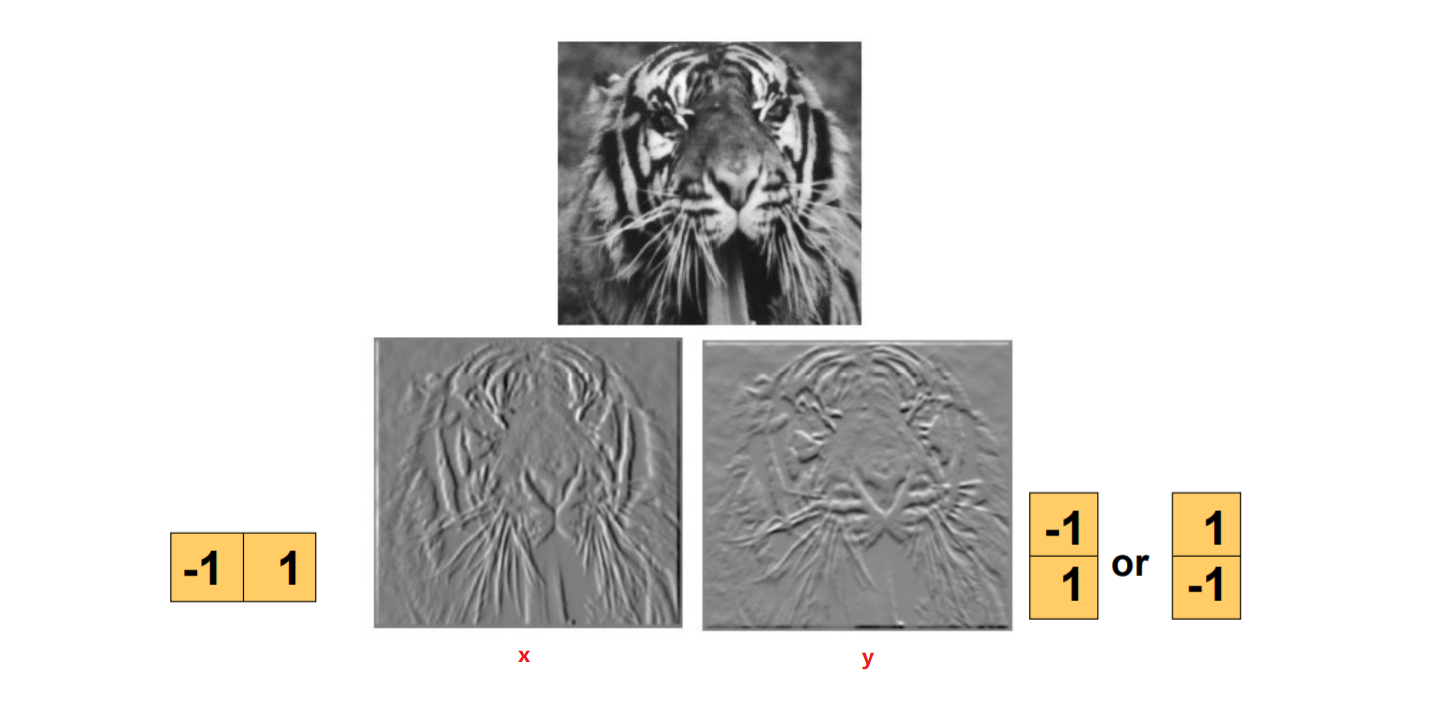
卷积描述偏导
使用卷积核处理
对灰度图的x和y方向分别处理后的效果如下图:
有限差分滤波器(卷积核)
- Roberts 算子
Roberts 算子是一种最简单的算子,是一种利用局部差分算子寻找边缘的算子。他采用对角线方向相邻两象素之差近似梯度幅值检测边缘。检测垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感,无法抑制噪声的影响。
1963年, Roberts 提出了这种寻找边缘的算子。 Roberts 边缘算子是一个 2x2 的模版,采用的是对角方向相邻的两个像素之差。
Roberts 算子的模板分为水平方向和垂直方向,如下所示,从其模板可以看出, Roberts 算子能较好的增强正负 45 度的图像边缘。
\[dx = \left[
\begin{matrix}
-1 & 0\\
0 & 1 \\
\end{matrix}
\right]
\]
\[dy = \left[
\begin{matrix}
0 & -1\\
1 & 0 \\
\end{matrix}
\right]
\]
- Prewitt算子
Prewitt 算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用。Prewitt算子适合用来识别噪声较多、灰度渐变的图像。
\[dx = \left[
\begin{matrix}
1 & 0 & -1\\
1 & 0 & -1\\
1 & 0 & -1\\
\end{matrix}
\right]
\]
\[dy = \left[
\begin{matrix}
-1 & -1 & -1\\
0 & 0 & 0\\
1 & 1 & 1\\
\end{matrix}
\right]
\]
- Sobel算子
Sobel算子是一种用于边缘检测的离散微分算子,它结合了高斯平滑和微分求导。Sobel 算子在 Prewitt 算子的基础上增加了权重的概念,认为相邻点的距离远近对当前像素点的影响是不同的,距离越近的像素点对应当前像素的影响越大,从而实现图像锐化并突出边缘轮廓。
\[dx = \left[
\begin{matrix}
1 & 0 & -1\\
2 & 0 & -2\\
1 & 0 & -1\\
\end{matrix}
\right]
\]
\[dy = \left[
\begin{matrix}
-1 & -2 & -1\\
0 & 0 & 0\\
1 & 2 & 1\\
\end{matrix}
\right]
\]
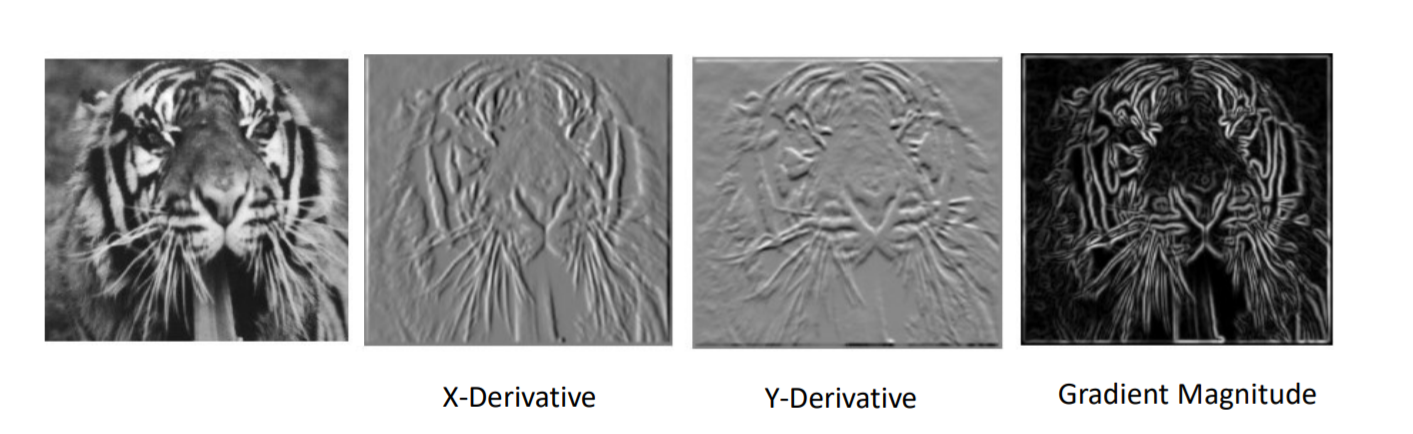
图像梯度
\[\nabla f=[\frac{\partial f}{\partial x},\frac{\partial f}{\partial y}]
\]
- 梯度指向强度增长最快的方向

- 梯度的角度
边的方向与梯度方向垂直
\[\theta = tan^{-1} (\frac{\partial f}{\partial y}/\frac{\partial f}{\partial x})
\]
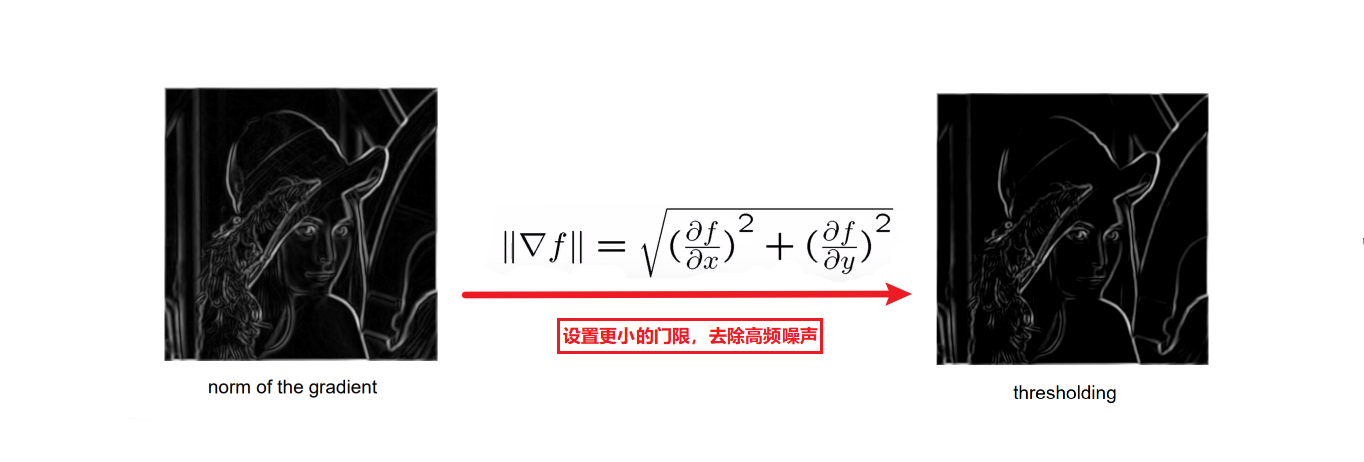
- 梯度的模长(幅值)
可以说明是边缘的可能性大小
\[||\nabla f|| = \sqrt{(\frac{\partial f}{\partial x})^2+(\frac{\partial f}{\partial y})^2}
\]
- 处理图像后:
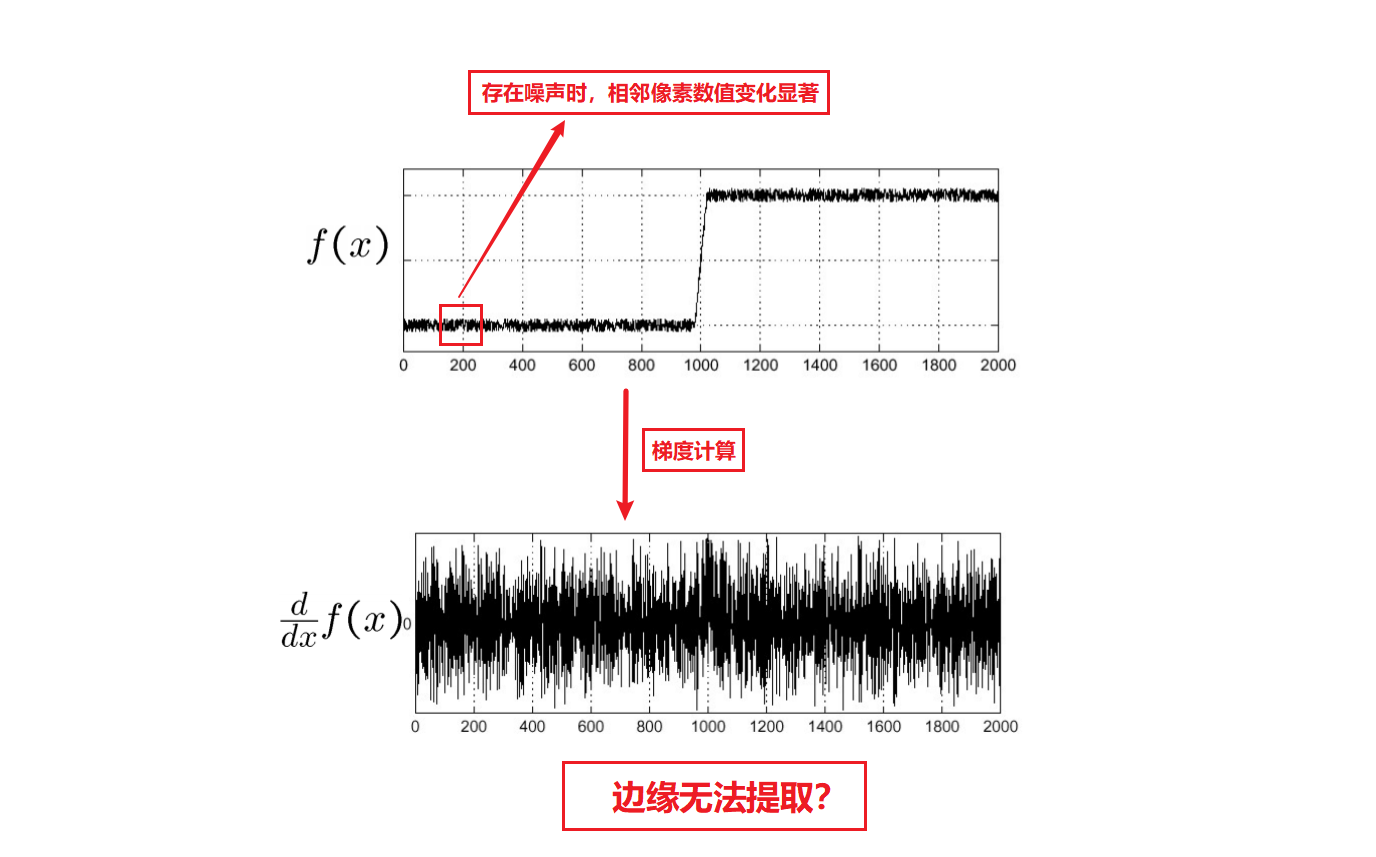
高斯滤波器
当图像的像素存在大量噪点时,相邻的像素差异大,所求梯度也会偏大,无法提取边缘信息。
解决方案
-
平滑处理:使用平滑滤波器去噪,使图像信号变得平滑
-
再对处理后的信号求导,取极值
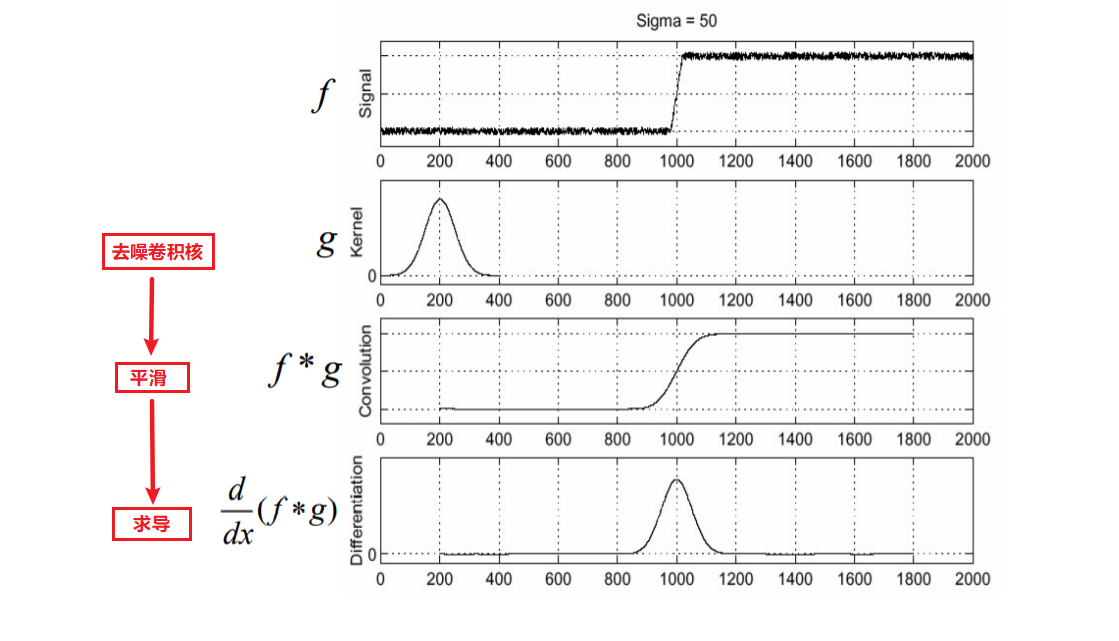
-
根据卷积的计算性质:\(\frac{d}{dx}(f*g) = f*\frac{d}{dx}g\),先对平滑核求导,再进行卷积相乘来简化运算,减少运算量
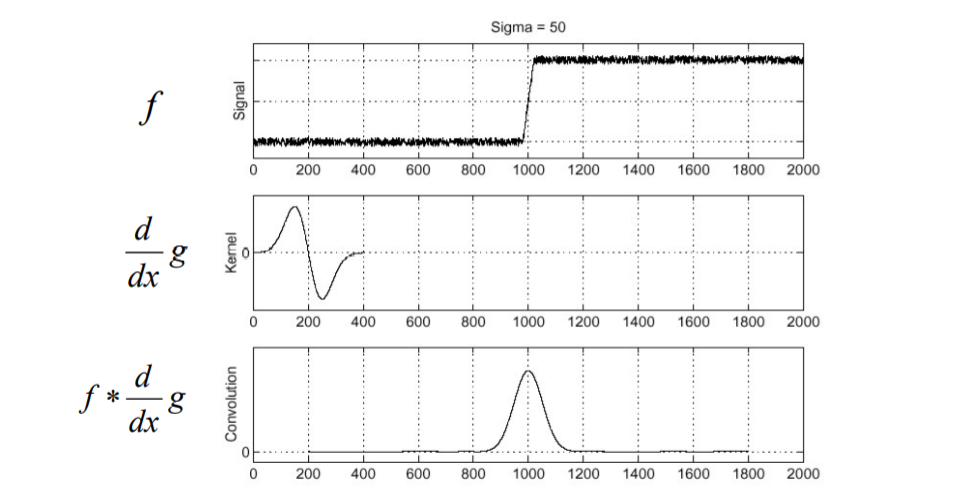
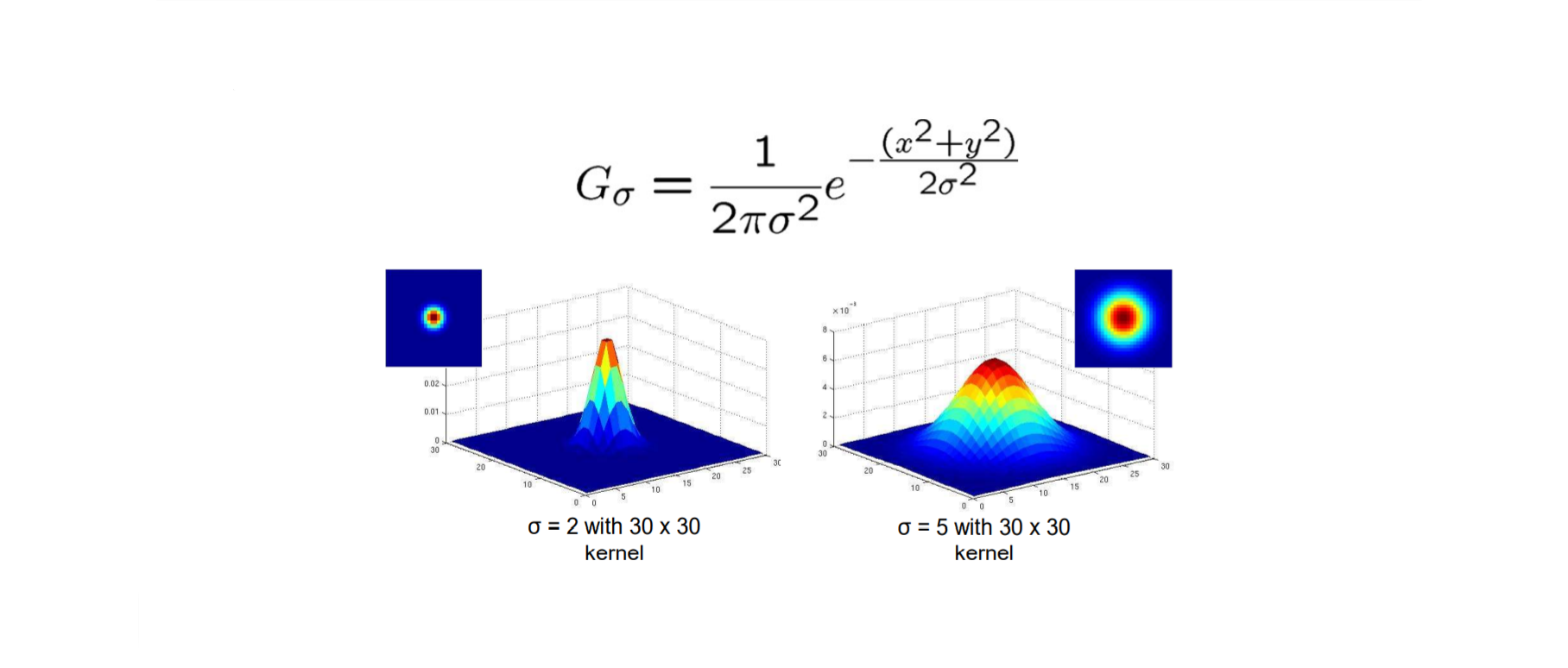
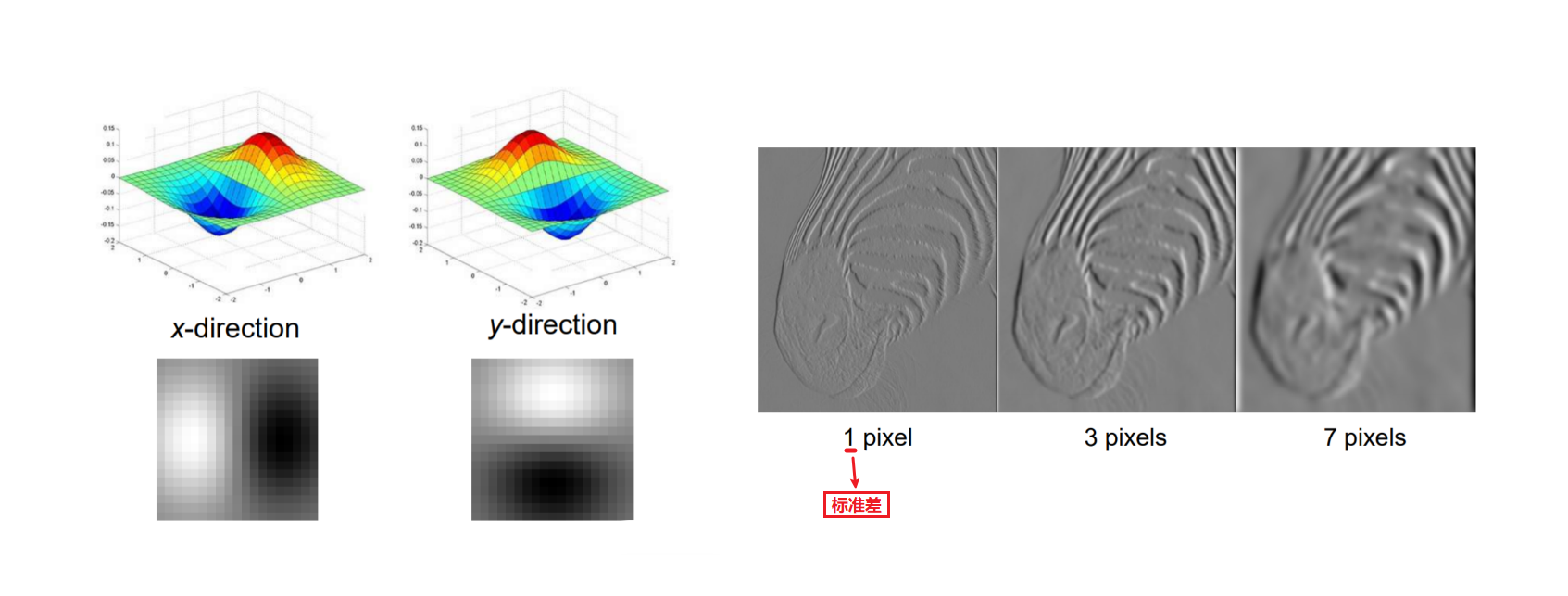
高斯滤波器
高斯滤波器的导数
参数选择的越小则保留的细节越多
Candy 边缘检测
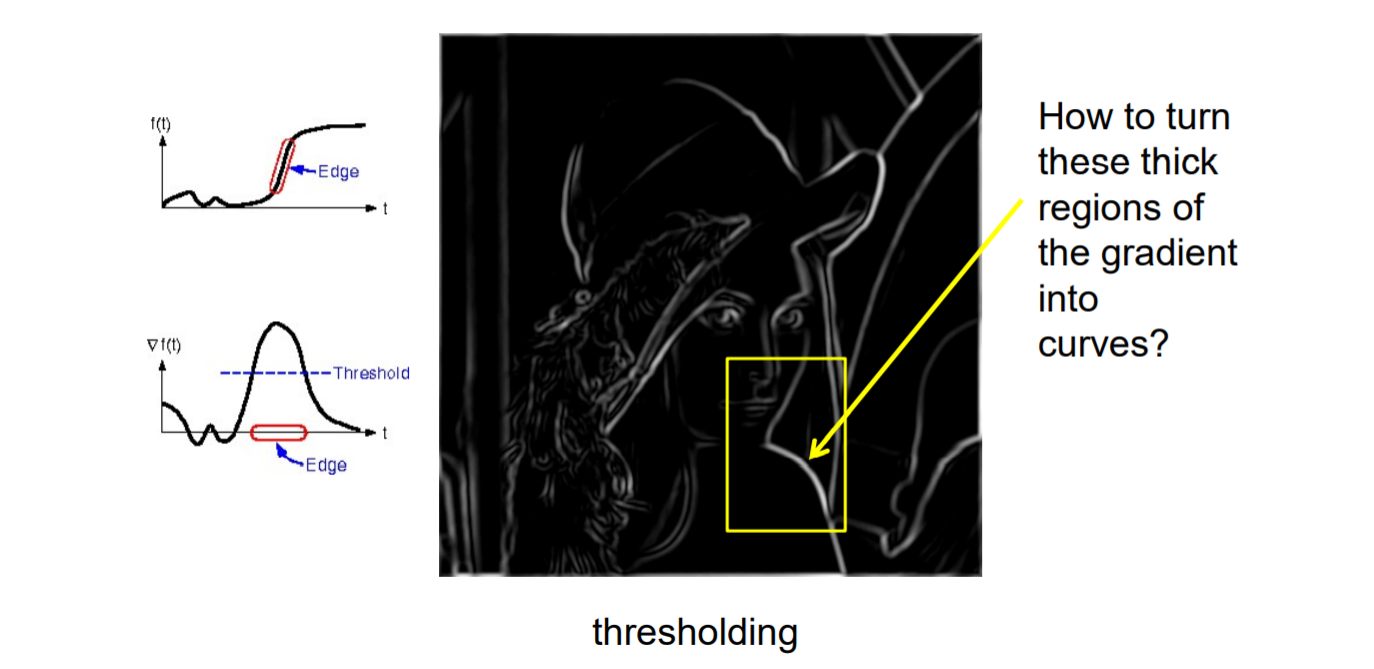
门限化
经过处理后,可以得到边缘图,但存在很多高频噪点,通过设置更高的门限,过滤噪点,使得到的边缘更“纯粹”
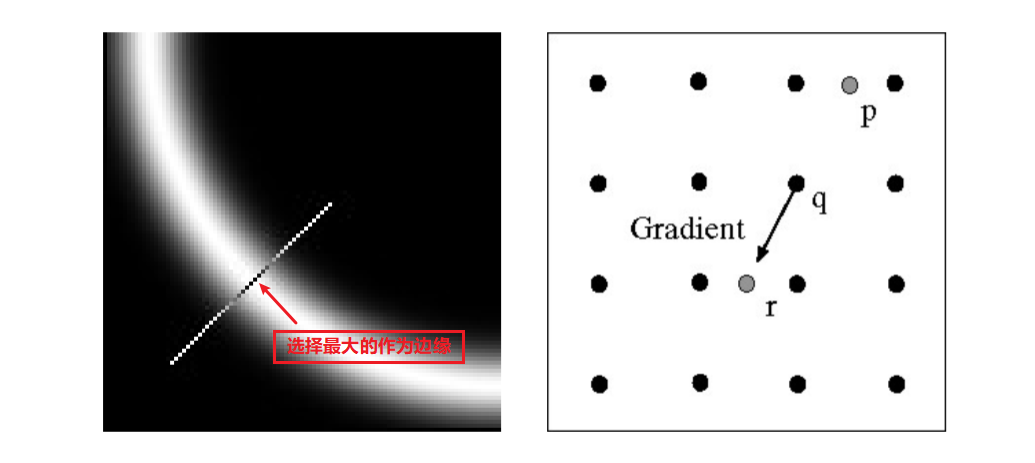
非最大化抑制
在通过高斯滤波后可以得到图像的大致轮廓线,由于图像的像素变换通常是缓慢改变的, 在处理后的图像中仍然存在大量的粗的“边”
方案
- 检查像素是否沿梯度方向为局部最大值,选择沿边缘宽度的最大值作为边缘
- 处理后
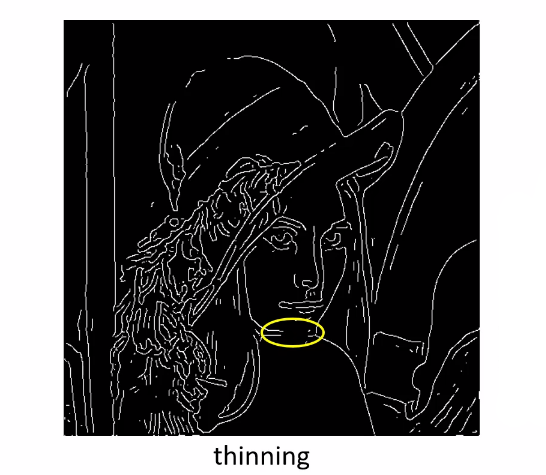
经过上面的处理后,已经可以较为粗糙的得到图像的边缘图,但仍然存在问题,在有些部分的边 缘不连续,失去了很多信息如上图的黄色区域,这是由于在门限化的过程中,设置过小,导致将需要的边缘滤除。
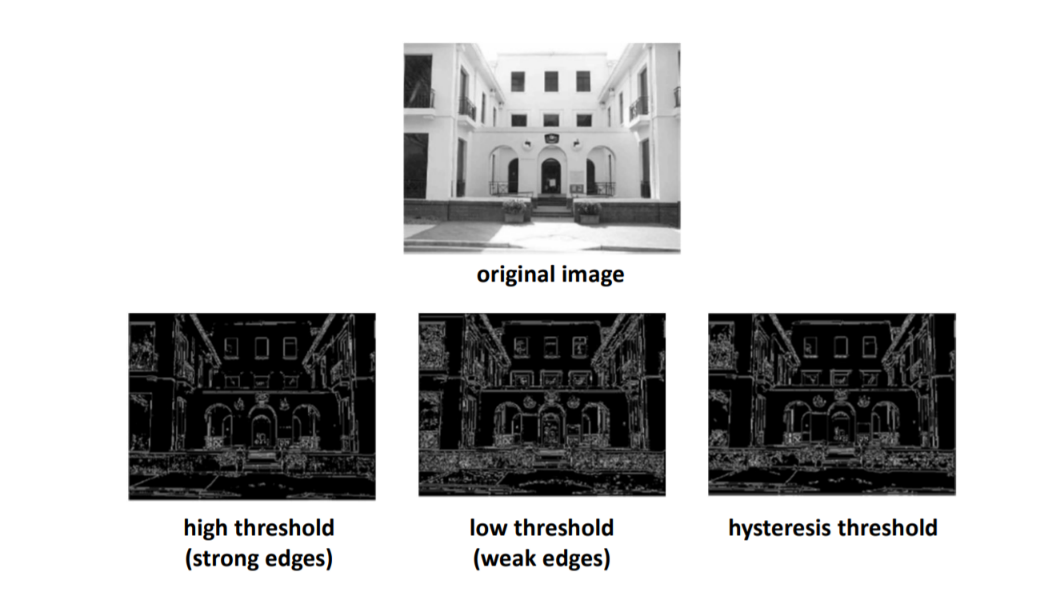
双门限法
- 先使用高门限将较粗的边检测出来,这些边都是比较鲁棒的,是噪声的可能性极低
- 再降低门限,将较细的边显现出来
- 将与高门限过滤出的边连接的低门限边保留,滤除没有连接的(不连续的)噪声
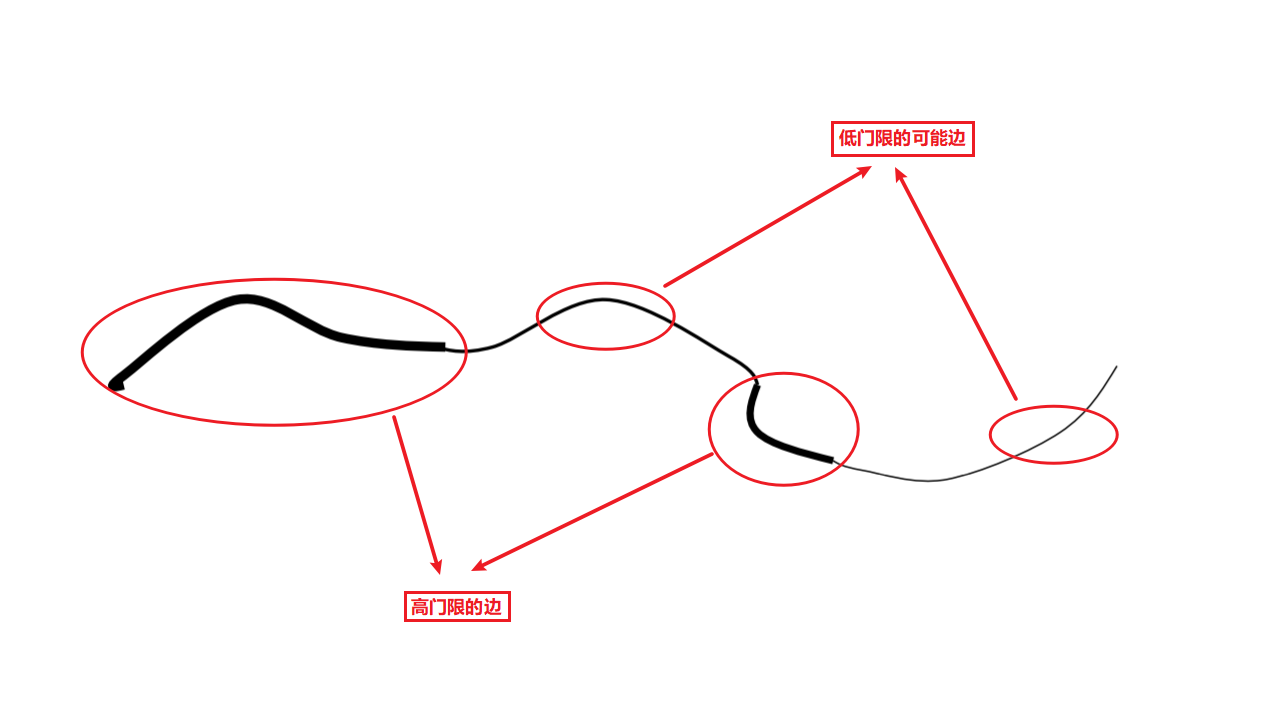
- 处理后可以得到更好的边缘效果
学习资源:北京邮电大学计算机视觉——鲁鹏

 浙公网安备 33010602011771号
浙公网安备 33010602011771号